

8.2 Порядок выполнения
1. Ознакомиться с библиотекой блоков для имитационного моделирования электротехнических устройств SimPowerSystems.
2. Используя элементы из библиотек SimulinkиSimPowerSystems, собрать схему, представленную на рис. 8.10.
При этом следует обратить внимание, что вектор выходных сигналов двигателя mразбивается на 4 элемента. Используя исходные данные своего варианта лабораторной работы №5 (табл.5.1), ввести параметры ДПТ.
Учитывая, что значения сопротивленийRяиRопприводятся при температуре окружающей среды (20°С), ввести в модель ДПТ значения, пересчитанные для рабочей температуры двигателя 75°С (Rя75, Rоп75) по формуле
 , (8.1)
, (8.1)
где q– температура обмотки двигателя до ее нагрева (20°С).
Здесь и далее следует учитывать, что в инженерных расчетах точность полученных значений должна соответствовать точности исходных данных.
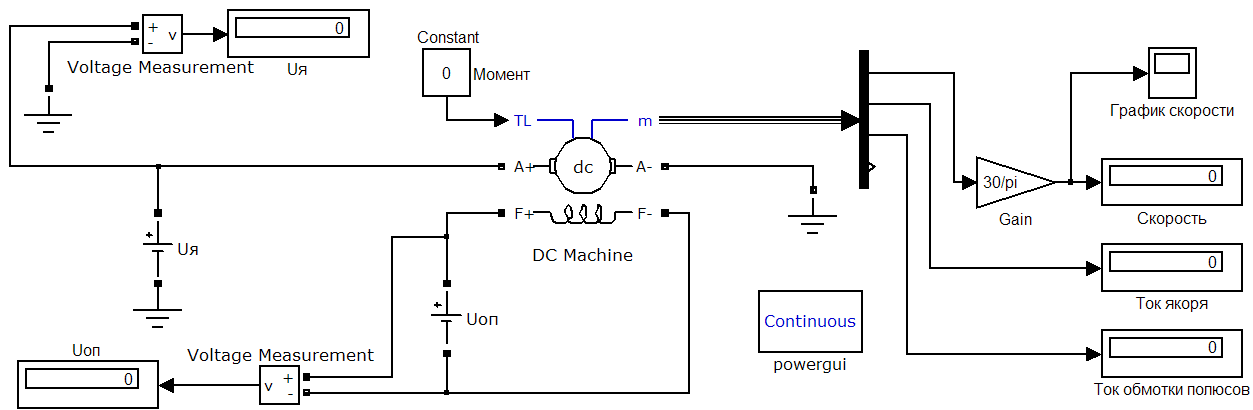
Рис. 8.10
Подать на обмотки якоря и полюсов номинальные напряжения, подать номинальный момент сопротивления и проверить правильность работы созданной схемы по установившемуся значению скорости (оно должно соответствовать номинальному значению – см. табл.5.1).
3. Используя элементы из библиотек SimulinkиSimPowerSystems, собрать виртуальную модель одноконтурной скоростной системы постоянного тока, представленную на рис. 8.8. В блок, реализующий ПИД–регулятор, внести параметры, рассчитанные в лабораторной работе №5.
4. Получить графики изменения скорости вращения и тока якоря. Сделать вывод о качественных параметрах переходных процессов. Сравнить с графиками, полученными в лабораторной работе №5. Сделать вывод.
5. Исследовать влияние возмущающего воздействия на динамические характеристики системы.
8.3 Содержание отчета
1. Цель работы.
2. Расчет параметров модели двигателя.
3. Расчет параметром регулятора.
4. Схемы моделей.
5. Результаты моделирования.
6. Выводы
8.4 Вопросы для самопроверки
1.Для чего предназначена библиотека блоков SimPowerSystеm?
2.Что входит в состав библиотеки SimPowerSystеm? Как реализовать модель двигателя постоянного тока?
3.Поясните различия между характеристиками системы при виртуальном моделировании и моделировании с использованием пакета Simulink?
Литература
[1] Бесекерский, В. А. Теория систем автоматического регулирования /В. А. Бесекерский, Е. П. Попов. – М.: Наука, 1975. - 768 с.
[2] Методы классической и современной теории автоматического управления: Учебник в 3-х т. / Под ред. Н.Д. Егупова. – М.: Изд-во МГТУ им. Н.Э.Баумана, 2000. Т.1. Анализ и статистическая динамика систем автоматического управления. Т.2. Синтез регуляторов и теория оптимизации систем автоматического управления. Т.3. Методы современной теории автоматического управления.
[3] Дорф Р., Бишоп Р. Современные системы управления. – М.: Лаборатория Базовых Знаний, 2002.– 832 с.
[4] Филлипс Ч., Харбор Р. Системы управления с обратной связью. – М.: Лаборатория Базовых Знаний, 2001.– 616 с.
[5] Изерман, Р. Цифровые системы управления: Пер. с англ. / Р. Изерман. –М.: Мир, 1984. - 541 с., ил.
[6] Куо, Б. Теория и проектирование цифровых систем управления: Пер. с англ. / Б. Куо. – М.: Машиностроение, 1986. - 448 с., ил.
[7]Попов, Е.П. Теория нелинейных систем автоматического регулирования и управления/Е.П. Попов. – М.: Наука, 1979. – 256 с.
[8] Андриевский, Б.Р. Избранные главы теории автоматического управления с примерами на языке MATLAB./Б.Р. Андриевский, А.Л. Фрадков. – СПб.: Наука, 1999.– 467с.
[9] Потемкин, В. Г. Система MATLAB. Справочное пособие/ В.Г. Потемкин. – М.: ДИАЛОГ-МИФИ, 1997. - 350 с.
[10] Герман-Галкин, С.Г. Matlab&Simulink. Проектирование мехатронных систем на ПК. – СПб.: Издательство «Корона.Век», 2014. – 368 с.
[10] Фираго, Б.И. Теория электропривода: Учеб.пособие / Б.И. Фираго, Л. Б. Павлячик. – Минск: ЗАО «Техноперспектива», 2004. – 527 с.