

Классификация по виду внешних воздействий
Детерминированные – внешние воздействия заранее известны;
Вероятностные – внешние воздействия носят случайный характер.
Математическое описание линейных систем.
Физическое и математическое моделирование.
Моделированием называется замена реального объекта с целью исследования его свойств другим объектом, сохраняющего наиболее важные свойства исследуемого объекта.
Оригинал – модель.
Модель – это заместитель оригинала, сохраняющий наиболее важные его свойства.
2 вида моделирования:
1. Физическое, физическая модель – это материальный и функциональный объект, идентичный или подобный оригиналу.
Материальность физической модели состоит в том, что ее работа подчиняется объективным законам природы.
Функциональность модели состоит в том, что она соответствует назначению и работе оригинала.
Аналогичность модели связана с правилами определения соответствия свойств.
Оригинал обладает свойством модели, т.к. все важные свойства в них совпадают.
Подобность модели и оригинала связана с пропорциональностью их свойств, и соответствие свойств в данном случае устанавливается по правилам теории подобия.
Математическая модель – это совокупность математических зависимостей и схем, позволяющих описать свойства оригинала.
Требования к математическим моделям:
– простота;
– точность.
Любая математическая модель – это результат компромисса между простотой и точностью.
Основные требования к математическим моделям:
– возможность получения еще не известной информации об оригинале.
Для получения математической модели в ТАУ используют один из двух методов:
Получение системы диф. уравнений на основе аналитического анализа процессов (физических, механических и др.) или экспериментальным путем.
Получение косвенных оценок динамических процессов, к которым относятся передаточные функции, временные и частотные характеристики.
Статика систем управления
Изучает установившиеся режимы. Три способа описания статического установившегося режима:
Аналитический – уравнение статики
![]()

Графический – статические характеристики – устанавливают связь выходного и входного сигналов в установившемся режиме.

Количественный – рассчитываются передаточные коэффициенты – К – отношение выходного сигнала
 к входному сигналу
к входному сигналу в установившемся режиме.
в установившемся режиме.
Динамика систем управления
Изучает поведение систем автоматического управления в переходных режимах.
Основным способом описания переходных режимов является аналитический способ, в основе которого лежит уравнение динамики:
![]()
Уравнение (3.1) – частный случай уравнения динамики (3.2) для условий, когда в системе отсутствуют изменения, т.е. все производные по времени равны 0.
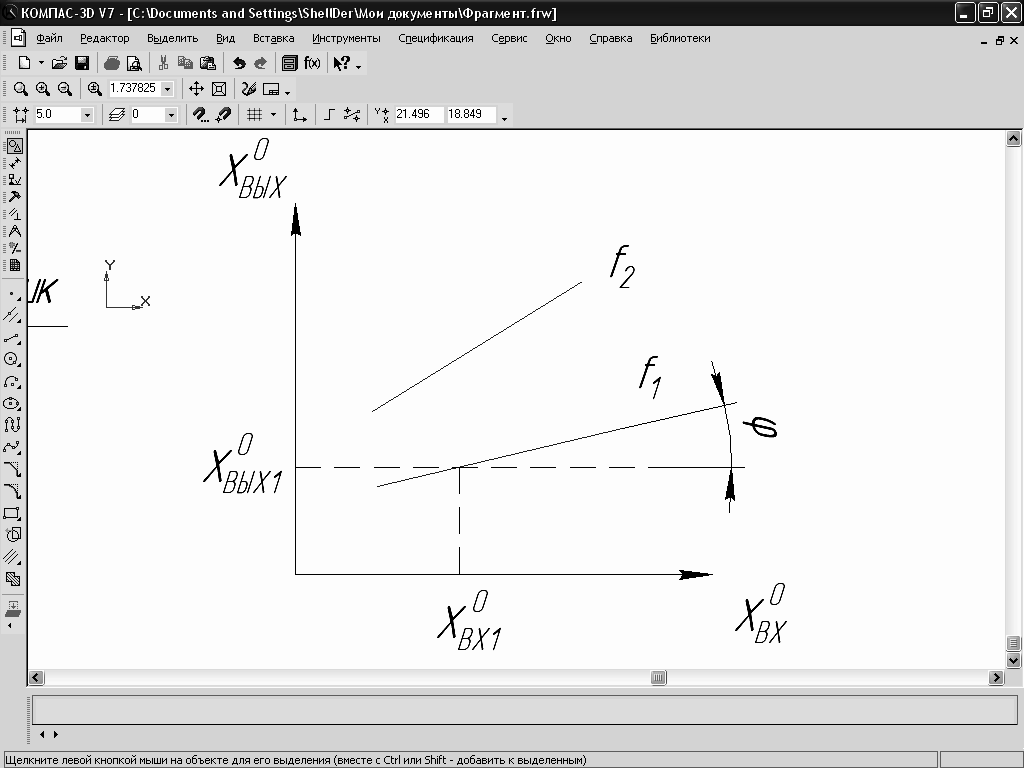
Способы линеаризации систем автоматического управления
Графический

Главным требованием, предопределяющим возможность линеаризации системы, является малость отклонений фактических значений выходных сигналов системы от расчетных, которые получены после линеаризации.
Появляется новая система координат, и движение системы рассматривается в отклонениях, (уравнение движения системы составляется в отклонениях).
![]()
Выражение (3.3) представляет собой аналитическую форму записи уравнения движения линеаризованной системы. Однако для упрощения записи знак приращения Δ обычно опускают, а уравнение (3.3) при этом записывают в виде
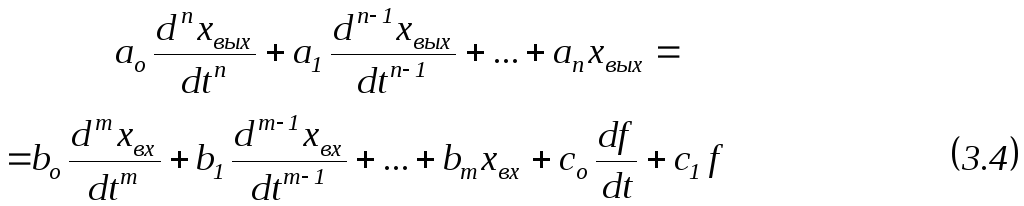
Аналитическая форма представления уравнения динамики (3.4).
Таким образом, переходные режимы линейных систем автоматического управления описываются аналитически дифференциальными уравнениями часто достаточно высокого порядка.