

Уравнение динамики в стандартной форме
Преобразуем выражение (3.6):
 (3.9)
(3.9)
коэффициенты
![]() имеют размерность времени.
имеют размерность времени.
![]()
![]()

![]() –по внешним
возмущениям.
–по внешним
возмущениям.
Выражение (3.10) – Стандартная форма записи уравнения движения, операторный вид.
 (3.11)
(3.11)
Стандартная форма записи уравнения движения позволяет унифицировать аналитические выражения, описывающие поведение любых систем автоматического управления в не зависимости от их физической природы.
Типовые воздействия в тау
Динамические свойства системы определяются ее временными характеристиками. Под временными характеристиками системы понимают графическое изображение процесса изменения выходной величины в функции времени при переходе системы из одного равновесного состояния в другое в результате поступления на вход системы некоторого типового воздействия. Так как временные характеристики можно получить не только путем решения диф. Уравнения системы, но и экспериментально, то возможность определения динамических свойств системы по временной характеристике имеет важное практическое применение, так как нет необходимости решать диф. уравнения
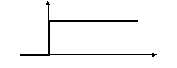
Ступенчатое
Такое воздействие моделирует работу системы в начальный момент времени при ее включении, а так же позволяет смоделировать реакцию системы на резкое увеличение нагрузки.

 Xвх
Xвх
T
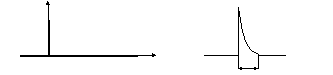
Импульсное. Описывается δ функцией.
Позволяет моделировать работу системы при толчках и ударах.
 Xвх
Xвх
→ ![]()
Δτ
t ![]()
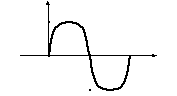
Гармоническое
Данное типовое воздействие позволяет моделировать работу системы при плавном изменении нагрузки или входных сигналов.
Xвх
![]()
t
Для описания работы системы в переходном режиме широко используются переходные функции и переходные характеристики.
Разгонная (собственно переходная)
Переходной функцией системы (звена) называют функцию, описывающую изменение выходной величины системы (звена), когда на ее вход подается единичное ступенчатое воздействие при нулевых начальных воздействиях. Переходную функцию обозначают h(t). График переходной функции h(t) – кривая от времени t называют переходной или разгонной характеристикой.

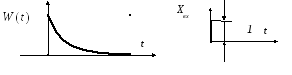
Импульсная
Импульсной переходной функцией системы (звена) называют функцию, описывающую реакцию системы звена на единичное импульсное воздействиях при нулевых начальных воздействиях. Обозначают w(t). График импульсной переходной функции называют импульсной переходной характеристикой.
Переходную и импульсную переходные характеристики называют временными характеристиками.
Импульсная переходная характеристика:
Частотные характеристики
При исследовании
систем АУ основным методом их изучения
является экспериментальный, при этом
широко используются частотные
характеристики системы, которые получают,
подавая на вход системы гармонический
сигнал малой постоянной амплитуды,
изменяя частоту этого сигнала в широких
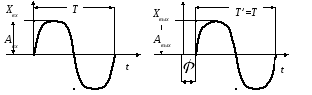
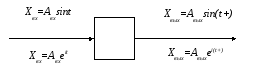
пределах. Если на вход системы (звена)
подать синусоидальные (гармонические)
колебания с постоянными амплитудами и
частотой Xвх=Aвхsin![]() t,
то после
затухания переходных процессов на
выходе также возникают синусоидальные
колебания Xвых=Aвыхsin(
t,
то после
затухания переходных процессов на
выходе также возникают синусоидальные
колебания Xвых=Aвыхsin(![]() t+
t+![]() )с той же
частотой, но с другой амплитудой и
сдвинутые по фазе относительно входных
колебаний.
)с той же
частотой, но с другой амплитудой и
сдвинутые по фазе относительно входных
колебаний.
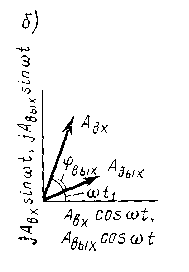
На комплексной плоскости входная величина xвx(t) =Авх sin wt для каждого значения времени, например t1, определяется вектором Авх, проведенным из начала координат под углом wt1. Как следует из рис. 2.16, б, действительная часть гармонической входной величины, представленной в комплексной форме, равна Авхсоswt1, а мнимая Aвхsinwt1. Обозначив значения комплексной входной величины для различных значений времени в виде xвx(t), получим выражение для входной величины в комплексной тригонометрической форме:
xвх(t) =Авх(соswt+j sin wt) (2.53)
Так как, согласно формуле Эйлера,
ejwt = coswt + j sinwt, (2.54)
то входная величина в комплексной показательной форме имеет вид
xвх(t) =Авх ejwt (2.55)
Аналогичным образом выходная величина в комплексной показательной форме имеет вид xвых(t) =Авых ejwt+φ
Зависимость относительной амплитуды колебания от частоты называется АЧХ.

![]()
Амплитудно-частотная характеристика Фазовая частотная характеристика
Отношение выходной величины системы к входной величине, выраженное в комплексной форме
![]() называют комплексной
частотной характеристикой (КЧХ)
системы.
называют комплексной
частотной характеристикой (КЧХ)
системы.
Отношение амплитуд выходного к входному сигналу - является модулем КЧХ, а разность фаз фвых—Фвх — ее фазой.