

Включение цепи с резистором и конденсатором на постоянное напряжение (заряд конденсатора)
Из схемы, приведенной на рис. 5.10, следует, что установившаяся составляющая напряжения на конденсаторе uCу = U, а свободная составляющая, очевидно, равна
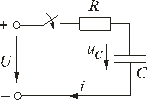
uCсв = A e-t/τ, τ = RC.
Полагаем, что до замыкания ключа конденсатор не был заряжен (Uс(0-) = 0). На основании законов коммутации uC(0-) = uC(0+) = 0, при t = 0; следовательно:
uC(0) = uCу(0) + uCсв(0) или 0 = U + A, откуда А = -U.
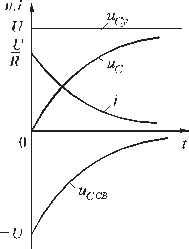
Тогда переходное напряжение на конденсаторе
uC = U (1 - e-t/τ),
а переходный ток в цепи
 .
.
Зависимости напряжений и токов от времени показаны на рис. 5.10. Из них видно, что напряжение на конденсаторе возрастает по экспоненциальному закону от нуля до напряжения источника, а ток уменьшается от начального значения до нуля также по экспоненте. Длительность их изменения определяется постоянной времени τ = RC. Здесь время переходного процесса принимается равным t ≈ (3 ÷ 5)τ.
Включение цепи с резистором и конденсатором на синусоидальное напряжение
 Рис.
5.11
Рис.
5.11
Пусть напряжение источника изменяется по закону
u = Um sin(ωt + ψ).
Установившаяся составляющая напряжения на конденсаторе (см. рис. 5.11) равна:
uCу = -Um XC / Z sin(ωt + ψ – φ – π / 2).
где: ![]() -
полное сопротивление цепи;
XC =
1 / (ωC) – емкостное сопротивление;
φ = -arctg(XC / R)
– угол сдвига фаз между установившимся
током в цепи и приложенным синусоидальным
напряжением.
-
полное сопротивление цепи;
XC =
1 / (ωC) – емкостное сопротивление;
φ = -arctg(XC / R)
– угол сдвига фаз между установившимся
током в цепи и приложенным синусоидальным
напряжением.
Свободная составляющая напряжения на конденсаторе
uCсв = A e-t/τ, τ = RC.
Переходное напряжение на конденсаторе
 .
.
 Рис.
5.12
Рис.
5.12
Полагая, что uC(0-) = 0, для постоянной интегрирования получим
 .
.
Окончательно напряжение на конденсаторе можно записать в виде
 .
.
Ток в цепи
 .
.
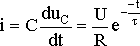
Зависимости переходного напряжения на конденсаторе от времени при различных значениях разностей ψ - φ показаны на рис. 5.12. Их анализ позволяет сделать следующие выводы.
Если в момент включения мгновенное значение установившегося напряжение на конденсаторе равно нулю (ψ – φ – π / 2 = 0), то и свободная составляющая напряжения равна нулю. В цепи сразу устанавливается режим (рис. 5.12 а).
Если в момент включения мгновенное значение установившегося напряжение на конденсаторе имеет наибольшее значение (ψ – φ – π / 2 = π / 2), то переходное напряжение достигает максимального значения приблизительно через половину периода и может приблизиться к удвоенной амплитуде установившегося напряжения, но не превысит его (рис. 5.12 в).
Разряд конденсатора на цепь с резистором и катушкой
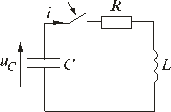 Рис.
5.13
Рис.
5.13
Пусть в цепи, изображенной на рис. 5.13, конденсатор был заряжен до напряжения uC(0-) = U0. Исследуем процессы в контуре, образованном резистором, конденсатором и катушкой после замыкания в момент t = 0 ключа. Так как источники в цепи отсутствуют, то установившиеся составляющие решений равны нулю. Решение будет состоять из одной свободной составляющей.
U-образные характеристики синхронного двигателя , компенсатора
U
– образные характеристики. В процессе
работы синхронного двигателя в его
обмотке статора наводятся ЭДС, сумма
которых ![]() [см.
(20.29)] приблизительно равна подведенному
к обмотке
[см.
(20.29)] приблизительно равна подведенному
к обмотке
статора
напряжению сети ![]() .
Эта сумма ЭДС эквивалентна результирующему
магнитному полю, вызванному действием
двух магнитодвижущихся сил: возбуждения
.
Эта сумма ЭДС эквивалентна результирующему
магнитному полю, вызванному действием
двух магнитодвижущихся сил: возбуждения![]() и
статора
и
статора![]() .
.
При
неизменном напряжении сети ![]() результирующее
магнитное поле постоянно. Поэтому при
изменении МДС возбуждения
результирующее
магнитное поле постоянно. Поэтому при
изменении МДС возбуждения![]() (изменении
тока возбуждения
(изменении
тока возбуждения![]() )
МДС статора
)
МДС статора![]() изменяется
таким образом, чтобы их совместное
действие оставалось неизменным, т. е.
чтобы оставалось неизменным результирующее
магнитное поле синхронного двигателя.
Это изменение МДС
изменяется
таким образом, чтобы их совместное
действие оставалось неизменным, т. е.
чтобы оставалось неизменным результирующее
магнитное поле синхронного двигателя.
Это изменение МДС![]() может
происходить только за счет изменения
величины и фазы тока статора
может
происходить только за счет изменения
величины и фазы тока статора![]() ,
т. е. за счет изменения реактивной
составляющей тока статора
,
т. е. за счет изменения реактивной
составляющей тока статора![]() .
.
Например,
при увеличении тока возбуждения ![]() ,
начиная от наименьшего его
значения
,
начиная от наименьшего его
значения![]() возрастает
МДС ротора, при этом МДС статора
уменьшается. Это уменьшение МДС
происходит при уменьшении индуктивной
(по отношению к напряжению сети
возрастает
МДС ротора, при этом МДС статора
уменьшается. Это уменьшение МДС
происходит при уменьшении индуктивной
(по отношению к напряжению сети![]() )
составляющей тока статора
)
составляющей тока статора![]() ,
которая оказывает на магнитную
систему подмагничивающее влияние.
,
которая оказывает на магнитную
систему подмагничивающее влияние.
При
этом полный ток статора ![]() уменьшается,
а коэффициент мощности двигателя
уменьшается,
а коэффициент мощности двигателя![]() ,
увеличивается. При некотором значении
тока возбуждения
,
увеличивается. При некотором значении
тока возбуждения![]() индуктивная
составляющая тока статора падает до
нуля. При этом ток статора достигнет
минимального (при данной нагрузке)
значения, так как станет чисто активным
индуктивная
составляющая тока статора падает до
нуля. При этом ток статора достигнет
минимального (при данной нагрузке)
значения, так как станет чисто активным![]() ,
а коэффициент мощности
,
а коэффициент мощности![]() .
.
Увеличение
тока возбуждения сверх значения ![]() ,
т. е. перевозбуждение двигателя,
вызовет увеличение тока
,
т. е. перевозбуждение двигателя,
вызовет увеличение тока![]() ,
но теперь этот ток будет опережающим
(емкостным) по отношению к напряжению
,
но теперь этот ток будет опережающим
(емкостным) по отношению к напряжению![]() .
Таким образом, принедовозбуждении
.
Таким образом, принедовозбуждении![]() синхронный
двигатель работает с отстающим током,
а при пе-ревозбуждении
синхронный
двигатель работает с отстающим током,
а при пе-ревозбуждении ![]() –с
опережающим.
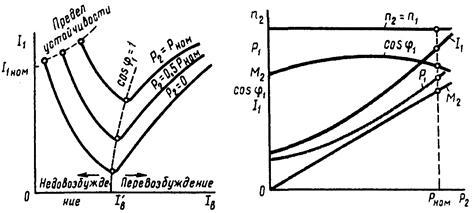
Зависимость тока статора от тока
возбуждения для синхронного двигателя
представлена U – образными характеристиками
(рис. 103).
–с
опережающим.
Зависимость тока статора от тока
возбуждения для синхронного двигателя
представлена U – образными характеристиками
(рис. 103).
То есть, синхронный двигатель является генератором реактивного тока: индуктивного по отношению к напряжению сети при недовозбуждении и емкостного при перевозбуждении. Указанная способность синхронных двигателей является их ценным качеством, которое используют для повышения коэффициента мощности электрических установок.
Аналогично синхронному генератору, включенному на параллельную работу с сетью, синхронный двигатель имеет предел устойчивости при минимальном токе возбуждения (штриховая линия в левой части рис. 103).
Рабочие
характеристики. Рабочие
характеристики синхронного двигателя
представляют собой зависимость частоты
вращения ротора ![]() ,
потребляемой мощности
,
потребляемой мощности![]() полезного
момента
полезного
момента![]() ,
коэффициента мощности
,
коэффициента мощности![]() и
тока в обмотке статора
и
тока в обмотке статора![]() от
полезной мощности двигателя
от
полезной мощности двигателя![]() (рис.
104). Частота вращения ротора
(рис.
104). Частота вращения ротора![]() всегда
равна синхронной частоте
всегда
равна синхронной частоте![]() ,
поэтому график
,
поэтому график![]() имеет
вид прямой, параллельной оси абсцисс,
Полезный момент на валу синхронного
двигателя
имеет
вид прямой, параллельной оси абсцисс,
Полезный момент на валу синхронного
двигателя![]() .
Так как рабочие характеристики снимают
при условии
.
Так как рабочие характеристики снимают
при условии![]() ,
то график
,
то график![]() имеет
вид прямой, выходящей из начала координат.
Мощность на входе двигателя
имеет
вид прямой, выходящей из начала координат.
Мощность на входе двигателя![]() .
С ростом нагрузки на валу двигателя
увеличиваются также и потери
.
С ростом нагрузки на валу двигателя
увеличиваются также и потери![]() поэтому
потребляемая мощность
поэтому
потребляемая мощность![]() растет
быстрее полезной мощности
растет
быстрее полезной мощности![]() и
график
и
график![]() имеет
несколько криволинейный вид.
имеет
несколько криволинейный вид.
Вид
графика ![]() зависит
от вида настройки тока возбуждения:
если в режиме х.х. ток возбуждения
установлен таким, что
зависит
от вида настройки тока возбуждения:
если в режиме х.х. ток возбуждения
установлен таким, что![]() ,
то с ростом нагрузки коэффициент мощности
снижается, если же установить
,
то с ростом нагрузки коэффициент мощности
снижается, если же установить![]() при
номинальной нагрузке, то при недогрузке
двигатель будет забирать из сети
реактивный опережающий ток, а при
перегрузке – отстающий. Обычно
устанавливают ток возбуждения таким,
чтобы
при
номинальной нагрузке, то при недогрузке
двигатель будет забирать из сети
реактивный опережающий ток, а при
перегрузке – отстающий. Обычно
устанавливают ток возбуждения таким,
чтобы![]() при
средней нагрузке (рис. 22.6). В этом случае
коэффициент мощности во всем диапазоне
нагрузок остается достаточно высоким.
Если же установить ток в обмотке
возбуждения синхронного двигателя
таким, чтобы
при
средней нагрузке (рис. 22.6). В этом случае
коэффициент мощности во всем диапазоне
нагрузок остается достаточно высоким.
Если же установить ток в обмотке
возбуждения синхронного двигателя
таким, чтобы![]() был
при нагрузке несколько превышающей
номинальную, то при номинальной
нагрузке
был
при нагрузке несколько превышающей
номинальную, то при номинальной
нагрузке![]() и
двигатель будет потреблять из сети
опережающий по отношению к напряжению
сети ток, что приведет к повышению
коэффициента мощности этой сети. В этом
отношении синхронные двигатели
выгодно отличаются от асинхронных,
работающих с отстающим по фазе током
(особенно при недогрузке двигателя) и
снижающих энергетические показатели
питающей сети.
и
двигатель будет потреблять из сети
опережающий по отношению к напряжению
сети ток, что приведет к повышению
коэффициента мощности этой сети. В этом
отношении синхронные двигатели
выгодно отличаются от асинхронных,
работающих с отстающим по фазе током
(особенно при недогрузке двигателя) и
снижающих энергетические показатели
питающей сети.
. U – образные характеристики. Рабочие характеристики
синхронного двигателя синхронного двигателя
Ток
в обмотке статора двигателя ![]() .
Из этого выражения видно, что ток
.
Из этого выражения видно, что ток![]() с
увеличением нагрузки на валу двигателя
растет быстрее, чем потребляемая
мощность
с
увеличением нагрузки на валу двигателя
растет быстрее, чем потребляемая
мощность![]() ,
вследствие уменьшения
,
вследствие уменьшения![]() .
.
Так как ротор синхронного двигателя вращается в ту же сторону, что и поле статора, то направление вращения ротора определяется порядком следования фаз линейных проводов, подведенных к обмотке статора, и порядком расположения фаз обмотки статора. Для изменения направления вращения трехфазного синхронного двигателя необходимо переключить два линейных привода, подведенных из сети к выводам обмотки статора.
В
заключение необходимо отметить, что
синхронные двигатели по сравнению
с асинхронными имеют преимущество,
заключающееся в том, что они могут
работать с ![]() ,
не создавая в питающей сети индуктивных
токов, вызывающих дополнительные потери
энергии. Более того, при работе с
перевозбуждением синхронные двигатели
создают в сети емкостный ток, чем
способствуют повышению коэффициента
мощности энергосистемы в целом.
Другое достоинство синхронных двигателей
состоит в том, что, как это следует из
(21.11), основная составляющая электромагнитного
момента пропорциональна напряжению
сети
,
не создавая в питающей сети индуктивных
токов, вызывающих дополнительные потери
энергии. Более того, при работе с
перевозбуждением синхронные двигатели
создают в сети емкостный ток, чем
способствуют повышению коэффициента
мощности энергосистемы в целом.
Другое достоинство синхронных двигателей
состоит в том, что, как это следует из
(21.11), основная составляющая электромагнитного
момента пропорциональна напряжению
сети![]() ,
а у асинхронных двигателей электромагнитный
момент пропорционален
,
а у асинхронных двигателей электромагнитный
момент пропорционален![]() [см.
(13.14)]. По этой причине при понижении
напряжения в сети синхронные двигатели
сохраняют большую перегрузочную
способность, чем асинхронные.
[см.
(13.14)]. По этой причине при понижении
напряжения в сети синхронные двигатели
сохраняют большую перегрузочную
способность, чем асинхронные.
К недостаткам синхронных двигателей относятся их более сложная конструкция и повышенная стоимость по сравнению с асинхронными двигателями с короткозамкнутым ротором. Кроме того, для работы синхронного двигателя требуется устройство для питания постоянным током обмотки возбуждения.
Опыт эксплуатации показал, что применение синхронных двигателей общего назначения наиболее целесообразно при мощности 200 кВт и более в установках, не требующих частых пусков и регулирования частоты вращения (мощные насосы, вентиляторы, компрессоры и т. п.).
3.Тиристоры, симисторы,динисторы
Тири́стор — полупроводниковый прибор, выполненный на основе монокристалла полупроводника с тремя или более p-n-переходами и имеющий два устойчивых состояния: закрытое состояние, то есть состояние низкой проводимости, и открытое состояние, то есть состояние высокой проводимости.
Тиристор можно рассматривать как электронный выключатель (ключ). Основное применение тиристоров — управление мощной нагрузкой с помощью слабых сигналов, а также переключающие устройства. Существуют различные виды тиристоров, которые подразделяются, главным образом, по способу управления и по проводимости. Различие по проводимости означает, что бывают тиристоры, проводящие ток в одном направлении (например тринистор, изображённый на рисунке) и в двух направлениях (например, симисторы, симметричные динисторы).
Тиристор имеет нелинейную вольт-амперную характеристику (ВАХ) с участком отрицательного дифференциального сопротивления. По сравнению, например, с транзисторными ключами, управление тиристором имеет некоторые особенности. Переход тиристора из одного состояния в другое в электрической цепи происходит скачком (лавинообразно) и осуществляется внешним воздействием на прибор: либо напряжением (током), либо светом (для фототиристора). После перехода тиристора в открытое состояние он остаётся в этом состоянии даже после прекращения управляющего сигнала, если протекающий через тиристор ток превышает некоторую величину, называемую током удержания.