

Konpekt_lektsiy_po_VN_2015_g
.pdf2.Контроль пути по дальности ----- заключается в определении пройденного (Sпр) и оставшегося (Sост) расстояний.
Sпр |
Sост |
|
|
|
|
3. Полный контроль пути ----- заключается в определении места воздушного судна (МС).
Контроль пути по направлению осуществляется:
Визуально, измерением на карте ЛБУ и расчетом БУ.
Sпр
ЛЗП
БУ
ЛФП |
ЛБУ |
9.00
МС
- Отметить на карте место самолета с указанием времени. |
9.00 |
- Измерить на карте ЛБУ с помощью масштабной линейки (в км).
- Рассчитать БУ по формуле: |
БУ0 = ( ЛБУ / Sпр ) * 60 |
Исправление пути по направлению в полете по ПВП.
1. Исправление пути по направлению выходом на точечный ориентир.
Этот способ используется при видимости навигационного ориентира (КО), расположенного на ЛЗП или в непосредственной близости от нее.
111

|
|
|
См |
|
|
|
МКсл |
ЛЗП |
Sпр |
|
усф |
|
БУ |
Л |
КО |
|
ЛФП |
Б |
выход на КО визуально |
|
|
У |
|
|
|
|
- измерить на карте ЛБУ; |
|
|
МС |
- рассчитать БУ: |
|
|
|
- БУ0 = (ЛБУ / Sпр) * 60 |
-развернуть воздушное судно на курс (МКвых), для выхода на контрольный ориентир визуально и выполнять полет с этим курсом до момента выхода на контрольный ориентир;
-после выхода на КО, развернуть воздушное судно на курс следования (МКсл) для продолжения полета по ЛЗП.
МКсл = МКр – (± БУ)
2. Исправление пути по направлению выходом в конечный пункт маршрута (КПМ).
Этот способ используется в том случае, если оставшееся (Sост) до КПМ расстояние невелико, или нет строгих ограничений по выдерживанию установленного воздушного коридора.
ЛЗП |
Sпр |
Sост |
ИПМ |
|
КПМ |
БУ |
Л |
ДП |
ЛФП |
Б |
|
|
У |
|
|
|
ДП |
|
МС |
БУ ПК = (ДП + БУ) |
-по отметке МС измерить ЛБУ на карте;
-рассчитать БУ:
БУ0 = (ЛБУ / Sпр) * 60. Рассчитать МК следования в КПМ - определить ДП и ПК:
ДП0 = (ЛБУ / Sост) * 60 МК кпм = МКр – (± ПК) ПК = БУ + ДП
112

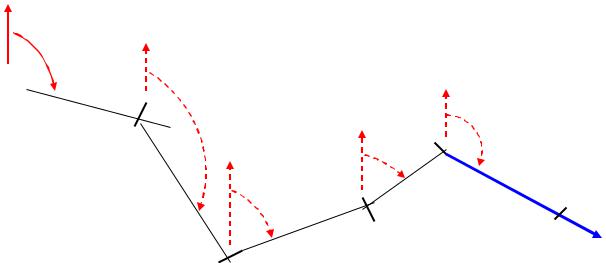
3. Исправление пути по направлению выходом на ЛЗП с МК вых по расчетному времени выхода (Твых).
См |
|
|
|
|
|
|
|
ЗМПУ |
|
|
|
См |
|
|
пос |
|
|
|
МКвых |
|
|
МКр |
|
|
|
|
|
ИПМ |
ЛЗП |
Sпр |
|
|
Увых = 450 |
|
|
||||||
|
|
|
|
|
|
|
БУ |
Л |
|
|
|||
|
|
|
||||
|
ЛФП |
Б |
|
|
||
|
|
У |
Твых = ЛБУ : (0,7 Vи ) |
|||
|
|
МС |
АН – 2; Твых = ЛБУ : 2 (мин) |
|||
- по отметке МС измерить на карте ЛБУ; |
||||||
- рассчитать БУ; |
|
|
|
БУ0 = (ЛБУ / Sпр) * 60. |
||
- задаться углом выхода: |
|
|
|
(Увых = ± 450) |
||
- расчитать курс выхода (МКвых); |
МКвых = ЗМПУ ± Увых |
|||||
- развернуть ВС на МКвых и выполнять полет с этим курсом в течении расчетного времени (Твыхода).
Твых = (ЛБУ / cos 450) : Vи = (ЛБУ : 0,7) : Vи = ЛБУ : (Vи * 0,7)
После выхода на ЛЗП развернуть самолет на МКсл по ЛЗП: МК сл = МКр – (± БУ)
Контроль пути по дальности.
1. Визуально и счислением пути.
Sпр |
Sост |
1.
 (визуально)
(визуально)
10.00
По отметке МС на карте определить Sпр и Sост
113

2. Счислением и прокладкой пути на карте.
Си |
|
- расчитать ФИПУ по известному МК сл. и УСф; |
|
|
|
ФИПУ = МК сл + (± УСф) + (± |
м); |
|
|
- от отметки МС проложить на карте |
линию |
|
ФИПУ |
ФИПУ и отметить на ней пройденное |
|
|
|
расстояние (Sпр); |
|
|
|
Sпр = W * Tпр. |
|
10.05 |
Sпр |
Если Тпр ≤ 10 мин, S пр = Vи * Тпр. |
|
|
|
МС |
|
|
|
10.15 |
|
Исправление пути по дальности.
Способы исправления пути по дальности:
1.Изменением высоты полета;
2.Спрямлением маршрута по согласованию с диспетчером;
3.Изменением скорости полета.
Исправление пути по дальности изменением скорости полета.
Является основным способом при выполнении полета ниже нижнего эшелона. Заключается в обеспечении прибытия на поворотный или конечный пункт маршрута в заданное или расчетное время.
Sпр (Тпр) |
|
Sост (Тост) ППМ или КПМ |
|
|
|
|
|
|
|
|
|
Wф |
|
W потр |
|
|
|||
V приб. |
|
V приб. потр. |
|
- по Sпр и Тпр рассчитать фактическую путевую скорость Wф = Sпр : Тпр
- по Sост и Тост рассчитать потребную путевую скорость
W потр = Sост : Тост - рассчитать поправку к скорости
ΔW = W потр - Wф
- рассчитать потребную приборную скорость Vприб. потр. = Vприб + (± ΔW)
114

Пример расчетов: |
|
Дано: |
Решение. |
Sпр = 45 км. |
Wф = Sпр : Тпр = 225 км/ч. (НЛ - 10) |
Sост = 60 км. |
W потр = Sост : Тост = 200 км/ч. (НЛ - 10) |
Тпр = 12 мин. |
ΔW = W потр – Wф = - 25 км/ч |
Т ост = 18 мин. |
Vприб. потр. = Vприб + (± ΔW) = 175 км/ч |
Vпр = 200 км/час. |
|
8. Полный контроль пути.
Способы полного контроля пути (определения МС).
1.Визуально, с отметкой МС на карте;
2.С помощью РТС;
3.Штилевой или полной прокладкой пути на карте.
1.Определение места самолета штилевой прокладкой пути.
По записям в ШБЖ рассчитать значения истинных курсов и пройденных, с этими курсами, расстояний.
ШБЖ: |
м --- определить на карте для района полета. |
|
|
1. Рассчитать ИК; |
ИК = МК + (± м) |
10.00МК1 = 900.
10.15 |
МК2 |
= 1500. |
ИК1 |
= 90 + 10 = 1000 |
|
10.35 |
МК3 |
= 600. |
ИК2 |
= 1600 |
|
10.50 |
МК4 |
= 450. |
ИК3 |
= 700 |
м = + 100 |
11.00 |
определить МС. |
ИК4 = 550 |
|
||
2. Рассчитать расстояния, пройденные с этими курсами в штилевых условиях
по известному значению Vи. |
Sпр = Vи * Тпр. |
(Vи = 180 км/ч) |
|
S1 = 45 км; |
S2 = 60 км; |
S3 = 45 км; |
S4 = 30 км. |
3. По рассчитанным значениям ИК и Sпр, от последней отметки места самолета, выполнить штилевую прокладку пути на карте.
115
Си |
δ = 3000 |
δн = δ ± 1800 = 1200 |
Си |
U = 40 км/ч. |
S сноса = U * Тобщ. |
ИК1 |
|
S сноса = 40 км |
 S1 ИК2 10.00
S1 ИК2 10.00
|
Си |
δн |
|
Си |
ИК4 |
|
|
S2 |
|
|
МС |
ИК3 |
S4 |
Sсноса |
|
|
|
|
|
S3 |
|
11.00 |
|
Используя данные о направлении и скорости ветра, определить направление и расстояние сноса самолета за время полета, проложить их на карте и определить место самолета с учетом влияния ветра.
116
Тема 5.1.7 Применение угломерных и УД радионавигационных систем.
Вопросы темы:
1.Общая характеристика радионавигационных систем.
2.Основные радионавигационные элементы.
3.Полет на радиостанцию пассивным и курсовым способом.
4.Контроль пути по направлению в полете на радиостанцию.
5.Активный полет на радиостанцию с выходом на ЛЗП.
6.Активный полет на радиостанцию с выходом на ППМ (в КПМ).
7.Контроль пути по направлению в полете от радиостанции.
8.Активный полет от радиостанции с выходом на ЛЗП.
9.Активный полет от радиостанции с выходом на ППМ (в КПМ).
10.Контроль пути по дальности с использованием боковой радиостанции.
11.Контроль пути по дальности и направлению пролетом базового угла 450
по боковой радиостанции.
12.Определение МС пеленгованием двух радиостанций.
13.Определение МС по одной боковой радиостанции.
14.Контроль и исправление пути по направлению и дальности с использованием
автоматических радиопеленгаторов (АРП).
15. Применение наземных РЛС для контроля пути по направлению и дальности, определения МС и навигационных элементов полета.
16.Задачи навигации, решаемые с помощью УДС VOR – DME.
1.Общая характеристика радионавигационных систем.
Радиотехнические средства самолетовождения по месту расположения делятся на
наземные и самолетные.
Кназемным радиотехническим средствам относятся: приводные и радиовещательные станции, станции радионавигационных систем, радиопеленгаторы, радиомаяки, радиолокаторы и радиомаркеры. Наземные радиотехнические средства принято называть радионавигационными точками
(РНТ).
Ксамолётным (бортовым) радиотехническим средствам относятся: радиокомпасы, самолетные радиолокаторы и радиостанции, специальное самолетное оборудование навигационных систем, доплеровские измерители угла сноса и путевой скорости, радиовысотомеры и т.п.
По дальности действия радиотехнические системы самолетовождения делятся на системы дальней навигации (свыше 1000 км), ближней навигации (до 1000 км) и системы посадки самолетов.
По характеру измеряемых величин радиотехнические системы делятся на следующие группы: угломерные; дальномерные; угломерно-дальномерные; разностно-дальномерные (гиперболические).
117

Угломерными называются такие радиотехнические системы, которые позволяют определять направление от самолета на РНТ или от РНТ на самолет.
Современные угломерные радиотехнические системы позволяют измерять направления с точностью 0,1—3°. Такая точность достаточна для решения большинства задач самолетовождения.
Дальномерными называются такие радиотехнические системы, которые позволяют определять расстояние (дальность) от самолета до РНТ или от РНТ до самолета.
Угломерно-дальномерными, или смешанными, называются системы, позволяющие одновременно измерять направление и дальность, т. е. позволяют определять одновременно две линии положения и, следовательно, место самолета.
2. Основные радионавигационные элементы.
Основными радионавигационными элементами при использовании радиокомпаса являются:
отсчет радиокомпаса (ОРК); Радиодевиация (∆Р); Курсовой угол радиостанции (КУР); пеленг радиостанции (ПР); пеленг самолета (ПС).
Курсовым углом радиостанции называется угол, заключенный между продольной осью самолета и действительным (ортодромическим) направлением на радиостанцию.
Он отсчитывается от продольной оси самолета по ходу часовой стрелки до направления на радиостанцию от 0 до 360°.
Курсовой угол радиостанции определяется с помощью радиокомпаса и отсчитывается по указателю курсовых углов. Зная величину КУР, можно указать направление на радиостанцию относительно продольной оси самолета. Так, например, если КУР=0, то радиостанция находится впереди самолета, если КУР =
118

180°, радиостанция позади самолета, если КУР = 90°, радиостанция справа под углом 90°
Отсчетом радиокомпаса называется угол, заключенный между продольной осью самолета и направлением, которое показывает радиокомпас на пеленгуемую радиостанцию.
Этот угол отсчитывается от продольной оси самолета до измеренного, с помощью радиокомпаса, направления на радиостанцию от 0 до 360°. В общем случае ОРК отличается на некоторую величину (ΔР) от действительного значения КУР. Эту ошибку радиокомпаса в измерении направления на радиостанцию называют радиодевиацией.
Радиодевиация — это угол, заключенный между направлением, которое показывает радиокомпас, и действительным направлением на пеленгуемую радиостанцию. Он отсчитывается от измеренного к действительному направлению на радиостанцию вправо со знаком плюс, влево - со знаком минус. Радиодевиация является величиной переменной как по знаку, так и по абсолютной величине и зависит от типа самолета, места установки рамочной антенны на самолете, а также от величины КУР.
Радиодевиация при КУР =0, 90, 180 и 270° равна нулю; при КУР 45, 135, 225 и 315° достигает наибольшего значения. Для уменьшения радиодевиации в радиокомпасе имеется механический компенсатор.
При полностью скомпенсированной радиодевиации указатели радиокомпаса показывают курсовой угол радиостанции.
Значения радиодевиации при различных курсовых углах радиостанции приведены на графике радиодевиации, размещенном в кабине пилотов.
Между КУР, ОРК и радиодевиацией существует следующая взаимозависимость:
КУР = ОРК + (± ∆ Р ); ОРК = КУР - (± ∆ Р ); ∆ Р = КУР - ОРК.
(см.рисунок)
119

Пеленгом радиостанции называется угол, заключенный между северным направлением меридиана, проходящего через самолет, и действительным направлением на радиостанцию.
Отсчитывается он от северного направления меридиана по ходу часовой стрелки до направления на радиостанцию от 0 до 360°.
Пеленг называется магнитным (МПР), если отсчет ведется от магнитного меридиана, и истинным (ИПР), если отсчет ведется от истинного меридиана.
Пеленги радиостанции рассчитываются по формулам:
МПР = МК + КУР; МПР = КК + (± ∆К) + КУР; ИПР = ИК + КУР; ИПР = МК + (± ∆М) + КУР;
ИПР = КК + (± ∆К) + (± ∆М) + КУР; ИПР = МПР + (± ∆М).
Между курсом, пеленгом и курсовым углом радиостанции существуют следующие зависимости:
МПР = МК + КУР; ИПР = ИК + КУР; ИПР = МК + (± ∆М) + КУР.
МК = МПР - КУР; |
ИК = ИПР - КУР; |
КУР = МПР - МК; |
КУР = ИПР - ИК. |
Пеленгом самолета называется угол, заключенный между северным направлением меридиана, проходящего через радиостанцию, и ортодромическим направлением на самолет.
Пеленг самолета отсчитывается от северного направления меридиана РС по ходу часовой стрелки от 00 до 360°.
Пеленг самолета называется истинным, если отсчет ведется от истинного меридиана, и магнитным, если отсчет ведется от магнитного меридиана.
120