

Содержание отчета
1. Схемы включения датчика.
2. Таблицы экеспериментальных и расчетных данных.
3. Характеристики UR = f(a);С = f(a) и S = f(a) для емкостного датчика угла поворота.
4. Характеристики Uв = f(a);Uв/ = f(a) и Uв// = f(a) для мостовой схемы включения емкостного датчика угла поворота.
Часть III. Исследование поворотного трансформатора Порядок выполнения работы
1. Исследовать работу поворотного трансформатора, включенного по схеме первичного симметрирования.
1.1. Собрать схему в соответствии с рис. 3.4. Питание амплитудой 10 В и частотой 400 Гц. Подать на клеммы С1, С2 обмотки возбуждения от генератора низкочастотных сигналов. Цифровой вольтметр в режиме измерения выходного переменного напряжения со шкалой 20 В подключить параллельно нагрузки Rн.
1.2. Вращая шкалу датчика по часовой стрелке через 100 от 00 до 300 и через 300 в диапазоне 300 – 3600, снять зависимость выходного напряжения Uв от угла поворота шкалы (ротора датчика) при различных значениях сопротивления нагрузки. Полученные данные занести в таблицу 3.8.
Таблица 3.8
|
a, град |
0 |
10 |
20 |
30 |
60 |
90 |
... |
360 |
|
Rн = ¥ |
|
|
|
|
|
|
|
|
|
Rн = 10 кОм |
|
|
|
|
|
|
|
|
|
Rн = 1 кОм |
|
|
|
|
|
|
|
|
|
d0 при Rн = 10 кОм |
|
|
|
|
|
|
|
|
|
d0 при Rн = 1 кОм |
|
|
|
|
|
|
|
|
1.3. Вычислить погрешность отображения угла поворота ротора датчика при разных значениях сопротивления нагрузки по выражению
 ,
(3.20)
,
(3.20)
где
URн
– выходное напряжение при сопротивлении
нагрузки 1 и 10 кОм;
![]() – выходное напряжение при Rн = ¥.
– выходное напряжение при Rн = ¥.
Результаты расчета занести в табл. 3.8.
1.4. Определить погрешности поворотного трансформатора от изменения амплитуды и частоты питающего напряжения на 1 % от номинальных значений 10 В и 400 Гц при сопротивлении нагрузки Rн = ¥. Полученные данные занести в таблицу 3.9. Погрешности от изменения амплитуды du и частоты df вычислить в соответствии с выражением (3.20).
Таблица 3.9.
|
a, град |
0 |
10 |
20 |
30 |
60 |
90 |
... |
360 |
|
Uп = 9,9 В, 400Гц |
|
|
|
|
|
|
|
|
|
Uп = 10 В, 360Гц |
|
|
|
|
|
|
|
|
|
du , % |
|
|
|
|
|
|
|
|
|
df , % |
|
|
|
|
|
|
|
|
2. Исследовать работу поворотного трансформатора, включенного по схеме вторичного симметрирования.
2.1. Собрать схему в соответствии с рис. 3.6. Величины сопротивлений нагрузки Rн1 и Rн2 выбрать одинаковыми. Амплитуда питающего напряжения 10 В, частота 400 Гц.
2.2. Вращая шкалу датчика по часовой стрелке от 00 до 3600 через 200 снять зависимости падений напряжения U1 и U2 на сопротивлениях Rн1 и Rн2 от угла поворота ротора датчика a. Данные занести в таблицу 3.10.
Таблица3.10
|
a, град |
0 |
20 |
40 |
60 |
80 |
... |
360 |
|
U1 при Rн1 = Rн2 = 10 кОм |
|
|
|
|
|
|
|
|
U2 при Rн1 = Rн2 = 10 кОм |
|
|
|
|
|
|
|
|
U1 при Rн1 = Rн2 = 1 кОм |
|
|
|
|
|
|
|
|
U2 при Rн1 = Rн2 = 1 кОм |
|
|
|
|
|
|
|
2.3. На основании графиков U1 = f(a) и U2 = f(a) при разных значениях Rн1 и Rн2 сделать выводы о недостатках вторичного симметрирования.
3. Исследовать работу датчика угла поворота в режиме линейного поворотного трансформатора с первичным симметрированием.
3.1. Собрать схему в соответствии с рис. 3.7. Сопротивление нагрузки Rн1 и Rн2 задавать одинаковыми и равными соответственно 10 кОм и 1 кОм. Амплитуда питающего напряжения 10 В, частота 400 Гц.
3.2. Вращая шкалу датчика по часовой стрелке от 00 до 3600 через 200 снять зависимости падений напряжения U1 и U2 на сопротивлениях Rн1 и Rн2 от угла поворота ротора датчика a. Данные занести в таблицу 3.11.
Таблица3.11
|
a, град |
0 |
20 |
40 |
60 |
80 |
... |
360 |
|
U1 при Rн1 = Rн2 = 10 кОм |
|
|
|
|
|
|
|
|
U2 при Rн1 = Rн2 = 10 кОм |
|
|
|
|
|
|
|
|
U1 при Rн1 = Rн2 = 1 кОм |
|
|
|
|
|
|
|
|
U2 при Rн1 = Rн2 = 1 кОм |
|
|
|
|
|
|
|
3.3. Задать Rн1 = 10 кОм и Rн2 = 9 кОм и повторить измерения U1 и U2. Данные измерений занести в таблицу 3.12. Вычислить по формуле (3.20) погрешность измерения угла a синусной и косинусной обмотками, используя данные таблицы 3.11.
Таблица 3.12
|
a, град |
0 |
10 |
20 |
30 |
60 |
90 |
... |
360 |
|
U1 , В |
|
|
|
|
|
|
|
|
|
U2 , В |
|
|
|
|
|
|
|
|
|
du1 , % |
|
|
|
|
|
|
|
|
|
du2 , % |
|
|
|
|
|
|
|
|
3.4. Выключить питание и все электроизмерительные приборы. Разобрать схему. Проводники собрать и уложить в первоначальное состояние. Известить преподавателя о выполнении работы.
СОДЕРЖАНИЕ ОТЧЕТА
1. Схемы включения поворотного трансформатора.
2. Таблицы экеспериментальных и расчетных данных.
3. Характеристики Uв = f(a) для первичного и вторичного симметрирования.
4. Характеристики Uв = f(a) для линейного поворотного трансформатора с первичным симметрированием.
5. Выводы о недостатках и достоинствах каждой из исследованных схем включения.
Лабораторная работа № 4
ИССЛЕДОВАНИЕ ЦИФРОВЫХ ЭЛЕМЕНТОВ И УЗЛОВ СИСТЕМ АВТОМАТИКИ
Цель работы: изучение функционирования счетчиков импульсов, делителей частоты, сдвиговых регистров, сумматоров двоичных чисел.
КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
Простейшим делителем частоты является триггер. Соединив последовательно несколько триггеров, получим простейший многоразрядный двоичный делитель. Более общее название делителей частоты – счетчики. Коэффициент деления счетчика, состоящего из n триггеров, составляет 2n; здесь n – число двоичных разрядов счетчиков. Четырехтриггерный счетчик может делить исходную частоту на 16, так как 24=16.
Выходные сигналы счетчика представляются в двоично–десятичном коде 8-4-2-1. Счетчики бывают двоичными и десятичными. Минимальный выходной код счетчиков 0000. Максимальный выходной код двоичного счетчика–1111 (десятичное число-15).
Десятичный счетчик так же, как и двоичный, является четырехтриггерным, но счет в нем благодаря запрещенным обратным связям останавливается при выходном коде 1001 (десятичное число -9).
Р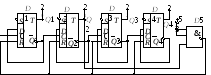 асширить
функции счетчика, то есть изменить
коэффициент деления им частоты, можно
видоизменив цепи его управления, то
есть организовав сброс в нулевое
состояние всех триггеров счетчика в
момент появления выходного кода,
соответствующего требуемому коэффициенту
деления. Пример организации счетчика
с коэффициентом деления 2 представлен
на рис. 4.1.
асширить
функции счетчика, то есть изменить
коэффициент деления им частоты, можно
видоизменив цепи его управления, то
есть организовав сброс в нулевое
состояние всех триггеров счетчика в
момент появления выходного кода,
соответствующего требуемому коэффициенту
деления. Пример организации счетчика
с коэффициентом деления 2 представлен
на рис. 4.1.
Рис.4.1. Пример организации счетчика с коэффициентом деления 2
Как только на выходе элемента D2 появится сигнал логической единицы, что означает поступление в счетчик двух импульсов, на выходе элемента D5 образуется нулевой сигнал. Этим сигналом осуществится сброс всех триггеров счетчика в нулевое состояние, и счет начнется вновь с нуля.
Кроме однонаправленных счетчиков, счет в которых только увеличивается, существуют двунаправленные или реверсивные счетчики, счет в которых может увеличиваться или уменьшаться. Представителями таких счетчиков в серии 155 являются микросхемы 155 ИЕ6 и 155 ИЕ7. Счетчик ИЕ6 – двоично-десятичный, а ИЕ7 – двоичный. Упрощенная функциональная схема реверсивного счетчика, аналогичная структуре перечисленных микросхем, представлена на рис. 4.2.
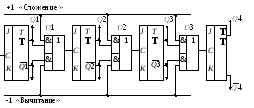
Рис. 4.2. Упрощенная функциональная схема реверсивного счетчика
При сложении сигнал единичного уровня подается только на верхние логические элементы D1…D3 типа 2И-ИЛИ. Триггеры работают по прямым выходам Q1…Q4, счет происходит на увеличение при поступлении импульсов тактовой частоты.
При
вычитании сигнал единичного уровня
снимается с шины «сложение» и подается
на шину «вычитание», то есть на нижние
схемы D1…D3
типа 2И-ИЛИ. Включение схем происходит
при наличии сигналов единичного уровня
на инверсных выходах
![]() триггеров. С приходом каждого тактового
импульса на вход С
первого триггера из содержимого счетчика
будет вычитаться единица.
триггеров. С приходом каждого тактового
импульса на вход С
первого триггера из содержимого счетчика
будет вычитаться единица.
Условное обозначение реверсивного счетчика представлено на рис. 4.3.
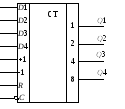
Рис. 4.3. Условное
обозначение реверсивного счетчика
Обозначение входов и выходов счетчика следующие:
- D1, D2, D3, D4 – параллельные информационные входы;
- «+1» – счетный вход на увеличение;
- «–1» – счетный вход на уменьшение;
- С – вход разрешения параллельной записи данных;
- R – вход сброса выходов в нулевое состояние;
- Q1, Q2, Q3, Q4 – выходы счетчика в двоично-десятичном коде 8-4-2-1.
С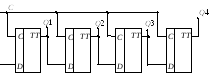 двиговый
регистр
– линейка из нескольких триггеров, в
которой в отличие от счетчиков-делителей
нет внутренних запрещающих обратных
связей. В простейшем регистре триггеры
соединены последовательно (рис. 4.4):
выход Q
предыдущего триггера передает бит
данных на вход D
последующего.
двиговый
регистр
– линейка из нескольких триггеров, в
которой в отличие от счетчиков-делителей
нет внутренних запрещающих обратных
связей. В простейшем регистре триггеры
соединены последовательно (рис. 4.4):
выход Q
предыдущего триггера передает бит
данных на вход D
последующего.
Рис. 4.4. Пример организации простейшего сдвигового регистра
Все таковые входы С триггеров соединены параллельно. При таком включении единичный сигнал, записанный по входу D в первый триггер после подачи следующего тактового импульса на вход С, перейдет во второй триггер, затем в третий и так далее.
Представителем сдвигового регистра в серии 155 является микросхема 155 ИР1. Микросхема может работать в двух режимах: режиме сдвига, режиме параллельной записи. Условное обозначение сдвигового регистра представлено на рис. 4.5.
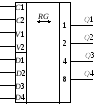
Рис. 4.5. Условное
обозначение сдвигового регистра
Обозначение входов и выходов микросхемы следующие:
- С1, С2 – тактовые входы;
- V1 – последовательный вход данных;
- V2 – вход разрешения параллельной записи;
- D1…D4 – параллельные информационные входы;
- Q1…Q4 – выходы регистра в двоично-десятичном коде 8-4-2-1.
В режиме сдвига регистр работает следующим образом. На вход V2 подается нулевой сигнал, разрешается работа тактовому входу С1. Единичный сигнал, поданный на вход V1, отрицательными фронтами последовательности тактовых импульсов сдвигается от входа V1 на вход Q1, а затем Q2 и так далее.
В режиме параллельной записи сигнал единичного уровня подается на вход V2, разрешается работа тактовому входу С2. В момент прихода на этот вход отрицательного перепада тактового импульса в регистр записываются данные от параллельных входов D1…D4.
Сумматоры – устройства, осуществляющие основную арифметическую операцию – суммирование чисел в двоичном коде. Простейший случай – суммирование двух одноразрядных чисел: 0+0=0, 1+0=1, 0+1=1, 1+1=10 (в десятичной записи это 2). Появившаяся в старшем разряде суммы единица называется единицей переноса. Сумматор для двух одноразрядных чисел называется полусумматором.
Полный сумматор имеет вход для приема сигнала переноса. Структурная схема полного сумматора двух четырехразрядных чисел представлена на рис. 4.6.
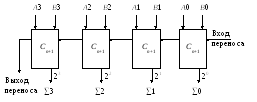
Рис. 4.6. Структурная схема полного сумматора двух четырехразрядных чисел
Здесь поразрядно (в параллель) суммируются два четырехразрядных числа А0 А1 А2 А3 и В0 В1 В2 В3: разряд А0 с разрядом В0, А1 с В1 и так далее. Суммирование осуществляется по разрядам в элементарных сумматорах. При этом в каждом сумматоре получаются парциональные суммы S0, S1, S2, S3 и сигналы внутреннего переноса Сn+1, которые последовательно поступают на вход переноса более старшего сумматора.
Условное обозначение полного четырехразрядного сумматора представлено на рис. 4.7.
Рис. 4.7. Условное
обозначение полного четырехразрядного
сумматора
Обозначения входов и выходов следующие:
- А1…А4 – входы одного четырехразрядного слагаемого;
- В1…В4 – входы второго слагаемого;
- Р0 – вход переноса от предыдущего сумматора;
- S1…S4 – выходы суммы разрядов входных слов;
- Р4 – выход переноса в следующий сумматор.