

Исследование датчиков угла поворота
Цель работы: изучение конструкций датчиков угла поворота, схем их включения и статических характеристик, связывающих выходной сигнал с входным углом перемещения.
Краткие теоретические сведения
Датчики угла поворота нашли широкое применение во многих отраслях промышленности, в том числе и в горной, для определения углов поворота, например, режущих органов добычных и проходческих машин, барабанов для навивки тросов скиповых и клетьевых подъемных машин и т.д.
В данной работе исследуется три датчика угловых перемещений: сельсинный, емкостной и поворотный трансформатор.
Сельсинный датчик является разновидностью электрической микромашины, предназначенной для использования в дистанционных системах передачи угла. Для реализации дистанционной передачи необходимо, как минимум, две микромашины, называемые сельсин-датчиком (СД) и сельсин-приемником (СП).
По конструкции СД и СП совершенно идентичны. Они имеют однофазную обмотку на статоре и трехфазную обмотку на роторе. Для подвода тока к роторной обмотке используются контактные кольца и щетки (это самый большой недостаток контактных сельсинов). Известны также бесконтактные сельсины. Они имеют сложную конструкцию и бывают двух модификаций: с тороидальными трансформаторами и конструкции Иосифьяна-Свечарника.
В лабораторной работе используются контактные сельсины типа ДИД-101ТВ. Их основные технические данные представлены в таблице 3.1.
Т а б л и ц а 3.1
|
Тип сельсина |
Uном, В |
fном, Гц |
Iном, А |
Погрешность следования Dq, мин |
Масса, кг |
|
ДИД-101ТВ |
50 |
50 |
0,15 |
±45 |
0,8 |
Существует две схемы включения сельсинов для работы в режиме дистанционной передачи угла: индикаторная и трансформаторная.
Схема индикаторной синхронной передачи угла представлена на рис. 3.1.
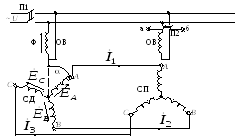
Рис. 3.1. Схема
индикаторной синхронной передачи угла
поворота
При подаче на обмотку возбуждения сельсина однофазного напряжения в его воздушном зазоре создается пульсирующий магнитный поток Ф, индуктирующий в фазных обмотках ротора (обмотки синхронизации) трансформаторные эдс, амплитуды которых пропорциональны косинусу угла между осью соответствующей фазной обмотки и направлением магнитного потока.
![]() ;
;
![]() ;
(3.1)
;
(3.1)
![]() ,
,
где Eф – эдс фазы при a = 0.
Угол поворота a задается вращением ротора СД. При этом между соответствующими точками роторной обмотки СД появится разность потенциалов
![]() ;
;
![]() ;
(3.2)
;
(3.2)
![]() ,
,
которая вызовет в цепи роторов СД и СП уравнительные токи I1, I2, I3. При взаимодействии этих токов с потоком обмотки возбуждения ОВ в роторе СП возникает синхронизирующий вращающий момент, благодаря которому ротор СП поворачивается в согласованное с ротором СД положение.
Ошибка рассогласования сельсинной передачи зависит от качества машин и определяется главным образом трением в подшипниках и контактных кольцах. По величине ошибки рассогласования Dq сельсины делятся на три класса: 1-й класс – Dq до ±0,750; 2-й класс – Dq до ±1,50; 3-й класс – Dq до ±2,50.
Схема трансформаторной синхронной передачи угла поворота представлена на рис. 3.2.
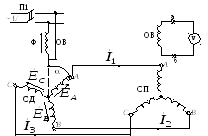
Рис. 3.2.
Трансформаторная схема включения
сельсинов
В этом режиме ротор сельсин-приемника СП механически затормаживается, а к обмотке возбуждения ОВ подключается вольтметр переменного тока. Если поворачивать ротор СД, то на зажимах "а, б" обмотки ОВ СП напряжение будет изменяться в соответствии с выражением
![]() ,
(3.3)
,
(3.3)
где Um - амплитудное значение напряжения при a = 0.
Для суммирования углов поворота от 2-х датчиков или изменения нулевого положения сельсин-приемника применяются дифференциальные сельсины. Эти микромашины имеют трехфазные обмотки как на роторе, так и на статоре. В работе используется дифференциальный сельсин СПД типа НЭД-101ТВ. Его технические данные аналогичны приведенным в табл. 3.1.
Дифференциальная схема включения сельсинов представлена на рис. 3.3.
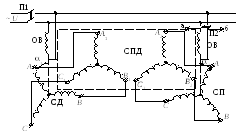
Рис. 3.3.
Дифференциальная схема включения
сельсинов
Ротор СПД не изменяет своего нулевого положения, если роторы СП и СД находятся в нулевых положениях, т.е. углы a1 и a2 равны 0. При повороте только ротора СД или только ротора СП ротор СПД поворачивается на тот же угол в соответствующую сторону и, таким образом, дифференциальный сельсин может производить суммирование или вычитание двух угловых величин a1 и a2.
Емкостный датчик угла поворота представляет собой многопластинчатый переменный конденсатор, позволяющий измерять входное угловое воздействие в пределах 0-1800. В основу его работы положено изменение емкости под воздействием изменяющейся площади перекрытия пластин.
Многопластинчатый статор датчика закреплен неподвижно, а многопластинчатый ротор может поворачиваться, изменяя площадь перекрытия пластин от нуля до полного вхождения пластин ротора в пластины статора.
Емкость С такого датчика изменяется в соответствии с выражением
![]() ,
(3.4)
,
(3.4)
где С0 – начальная емкость датчика; e - относительная диэлектрическая проницаемость среды между пластинами датчика (для воздуха 1); a - угол поворота подвижных пластин датчика относительно неподвижных (входное воздействие); y - изменение площади перекрытия пластин на единицу угла поворота; d – расстояние между пластинами (или толщина диэлектрика).
Емкость С0 определяется из выражения
![]() ,
(3.5)
,
(3.5)
где S0 – действующая площадь пластин конденсатора при угле поворота многопластинчатого ротора, равном нулю.
Относительное изменение емкости, характеризующее коэффициент преобразования датчика, составит
![]() ,
(3.6)
,
(3.6)
где DS = ay (n-1) – приращение действующей площади пластины конденсатора.
Величины С0 и DС измеряются в пикофарадах (1пф=10-12Ф). Выходное сопротивление датчика, определяемое как 1/wС, где w = 2pf, даже на высоких частотах f достаточно велико (порядка 50-100 кОм), а выходная мощность настолько мала, что на нем не возможно без применения усилителя измерить падение напряжения даже вольтметром с очень большим входным сопротивлением. Поэтому емкостные датчики подобного типа используются, как правило, в комплекте с усилителем и соединяются с ним во избежание наводок экранированным проводом или коаксиальным кабелем.
Достоинства емкостных датчиков угла поворота: высокая чувствительность; простота конструкции и возможность за счет соответствующего выбора формы подвижной и неподвижной частей получать заданную функциональную зависимость между изменением емкости и входным угловым перемещением; малая инерционность.
Недостатки датчика: большое внутреннее сопротивление и необходимость питания током высокой частоты; необходимость тщательной экранировки для уменьшения влияния внешних электрических полей паразитных ёмкостей.
Для исследования в лабораторной работе представлен емкостной датчик со следующими параметрами: n = 15; d = 0,3 мм; e = 1.
Поворотные трансформаторы так же, как и сельсины представляют собой микромашины переменного тока.
Поворотный трансформатор имеет две обмотки на статоре, сдвинутые в пространстве на 90°, и такие же две обмотки на роторе. Ток к обмоткам ротора подводится через кольца или спиральные пружины.
Основное требование, предъявляемое к поворотным трансформаторам,— обеспечение на выходе напряжения, изменяющегося с углом поворота ротора по закону синуса. Отклонение от синусоиды не должно превышать 0,05%, что обеспечивается конструктивными приемами: схемой и характером обмоток, скосом пазов и т. п.
Синусно-косинусные поворотные трансформаторы работают с обмоткой возбуждения ОВ статора, подключенной к источнику переменного тока. Одна из обмоток ротора (синусная) соединяется— с нагрузкой (рис. 3.4). При повороте ротора взаимная индуктивность обмоток будет изменяться по закону синуса и соответственно, если сопротивление нагрузки велико (Rн®¥),
![]() ,
(3.7)
,
(3.7)
где Eр max — максимальная ЭДС в обмотке ротора при a = 90°, когда оси обмоток совпадают.

Рис. 3.4. Схема
включения поворотного трансформатора
при первичном симметрировании
Eр max сочетается с напряжением сети, к которой подключен поворотный трансформатор, как
![]() ,
(3.8)
,
(3.8)
где kт = wp/wc — коэффициент трансформации, определяемый отношением числа витков обмоток ротора и статора.
Если вторичную синусную обмотку замкнуть на некоторое сопротивление Rн ¹ ¥, то по обмотке потечет ток Iр.с, который создаст магнитный поток Ф, направленный по оси обмотки. Поток можно разложить на две составляющие: продольную Фd, направленную по оси обмотки статора, и поперечную Фq, направленную перпендикулярно к этой оси (рис. 3.5). Продольная составляющая действует навстречу потоку обмотки возбуждения Фв и компенсируется соответствующим увеличением тока в этой обмотке. Поперечная составляющая, которую нельзя скомпенсировать со стороны статора, индуцирует в обмотке ротора ЭДС самоиндукции
![]() ,
(3.9)
,
(3.9)
где w — угловая частота питающей сети; L—индуктивность обмотки, пропорциональная квадрату числа витков.
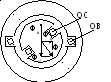
Рис. 3.5. Схема
действия магнитных потоков обмоток
поворотного трансформатора
Выражение для ЭДС принимает вид
![]() ,
(3.10)
,
(3.10)
где b — комплексная величина, определяемая параметрами обмотки.
Таким образом, ЭДС существенно отклоняется от синусного закона.
Для того чтобы устранить погрешность, обусловленную поперечной составляющей магнитного потока, используют так называемое симметрирование — первичное и вторичное. При первичном симметрировании вторую, квадратурную обмотку статора замыкают на малое сопротивление. При этом поперечный поток, направление которого совпадает с осью квадратурной обмотки, индуцирует в ней ЭДС, которая, в свою очередь, создает ток и поток. Результирующий поток по поперечной оси теперь определяется суммарной МДС, создаваемой током в обмотке ротора и током в квадратурной обмотке статора. Так как нагрузочное сопротивление, на которое замкнута квадратурная обмотка, мало, то система обмоток: ротора (ее поперечные витки) и квадратурная статора представляют собой трансформатор, работающий в режиме, близком к короткому замыканию. При этом вследствие размагничивающего действия короткозамкнутой обмотки результирующий поток по поперечной оси становится весьма малым и практически не влияет на работу поворотного трансформатора. К недостаткам первичного симметрирования следует отнести непостоянство тока в обмотке возбуждения — зависимость его от угла поворота ротора. Поэтому первичное симметрирование вполне пригодно лишь для поворотных трансформаторов, которые находятся в начале схемы и обмотка возбуждения которых подключена к сети.
При вторичном симметрировании (рис. 3.6) к нагрузочному сопротивлению подключена первая, синусная обмотка, а не задействованная ранее вторая обмотка, скажем косинусная, замыкается на сопротивление, равное нагрузочному. Поперечные составляющие потоков, создаваемые этими обмотками, оказываются равными, но направленными встречно, и они взаимно компенсируются. При этом ток в обмотке возбуждения, расположенной на статоре, при повороте ротора остается неизменным. Недостаток вторичного симметрирования — зависимость выходного сопротивлений поворотного трансформатора от угла поворота ротора.
Наилучшие результаты дает совместное использование первичного и вторичного симметрирования. Линейный поворотный трансформатор используют в том случае, если необходимо напряжение на выходе, пропорциональное не синусу угла поворота, а самому углу. Для обычной схемы включения поворотного трансформатора линейная зависимость обеспечивается в пределах углов 0±30°, так как в этом случае sin a » a.
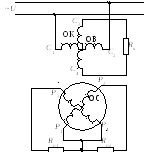
Рис. 3.6. Схема
включения поворотного трансформатора
при вторичном симметрировании
Для того чтобы расширить диапазон линейной зависимости, используют специальные схемы включения, причем также возможно первичное и вторичное симметрирование. Схема линейного поворотного трансформатора с первичным симметрированием показана на рис. 3.7. Последовательно с обмоткой возбуждения включена косинусная обмотка ротора, а квадратурная обмотка статора замкнута на малое сопротивление, благодаря чему подавляется поперечная составляющая магнитного потока.
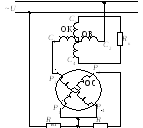
Рис. 3.7. Схема
включения линейного поворотного
трансформатора при первичном
симметрировании
Продольный магнитный поток создается током Iс, протекающим по обмотке возбуждения с числом витков wc и по косинусной обмотке, которая расположена под углом a к продольной оси; соответственно в создании потока участвует часть витков wрcosa. При этом в первичной цепи как бы образуется обмотка с числом витков wc+wрcosa и в синусной обмотке будет индуцироваться ЭДС Eр.л, которую можно найти из соотношения
![]() ,
(3.11)
,
(3.11)
откуда с учетом формулы (3.7)
![]() .
(3.12)
.
(3.12)
Введя в полученное выражение коэффициент трансформации поворотного трансформатора kт = wc/wр, окончательно получим
![]() .
(3.13)
.
(3.13)
Если выбрать kт = 0,536, то зависимость Eр = f(a) становится линейной в диапазоне углов от -60° до +60° с погрешностью, не превышающей 0,06%. Для того чтобы обеспечить линейность характеристики с учетом падений напряжения в обмотках, коэффициент трансформации обычно принимают равным 0,565.