

Содержание отчета
1. Схемы включения резисторного датчика.
2. Таблицы экспериментальных и расчетных данных.
3. Характеристики Uв = f(x) для всех схем включения при различных значениях сопротивлений нагрузки.
4. Характеристики du = f(x).
Часть II. Исследование магниторезисторного датчика перемещения порядок выполнения работы
1. Исследовать изменение сопротивления магниторезисторов магниторезисторного датчика от изменения величины перемещения.
1.1. Включить цифровой прибор в режим измерения сопротивления на постоянном токе (диапазон 2 кОм).
1.2. Выполнить поочередное измерение сопротивлений магниторезисторов Rм1, Rм2 при изменении входной величины перемещения в диапазоне 0 ¸ 0,9 мм через 0,1 мм. Изменение перемещения осуществлять вращением ручки винта по часовой стрелке, отсчет выполнять по показаниям микрометра.
Полученные данные занести в таблицу 1.6.
Т а б л и ц а 1.6
|
X, мм |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
|
Rм1, Ом |
|
|
|
|
|
|
|
|
|
|
|
Rм2, Ом |
|
|
|
|
|
|
|
|
|
|
2. Исследовать зависимости выходного напряжения мостовой дифференциальной схемы включения магниторезисторного датчика от изменения входной величины перемещения при различных значениях сопротивления нагрузки.
2.1. Собрать схему в соответствии с рис. 1.4 (первоначально задать величину Rн = ¥). Цифровой прибор включить в режим измерения постоянного тока, диапазон 2 В. Напряжение питания задать равным 6,0 В.
2.2. Снять зависимости Uв = f(x), изменяя величину перемещения Х в диапазоне 0 ¸ 0,9 мм через 0,1 мм для трех значений: Rн= ¥; Rн= R1; Rн= R2.
Полученные данные занести в таблицу 1.7.
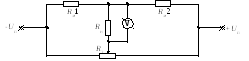
Рис. 1.4. Мостовая
дифференциальная схема включения
магниторезисторного датчика
Т а б л и ц а 1.7
|
X, мм |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
|
Uв, B при Rн = ¥ |
|
|
|
|
|
|
|
|
|
|
|
Uв, B при Rн = R1 |
|
|
|
|
|
|
|
|
|
|
|
Uв, B при Rн = R2 |
|
|
|
|
|
|
|
|
|
|
2.3. При нагрузке Rн = R2 изменить напряжение питания до величины 5,9 и снять зависимость Uв = f(x). Данные занести в таблицу 1.8. Относительную погрешность вычислить в соответствии с выражением (1.5).
Т а б л и ц а 1.8
|
X, мм |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
|
Uв, B при Rн = R2 |
|
|
|
|
|
|
|
|
|
|
|
du, % |
|
|
|
|
|
|
|
|
|
|
2.4. Выключить источник питания и все электроизмерительные приборы. Разобрать схему. Проводники собрать и уложить в первоначальное состояние. Известить преподавателя о выполнении работы.