

Глава 4. Приборы измерения количества и расхода.
4.1. Объемные расходомеры.
К объемным счетчикам расхода жидкостей относятся расходомеры поршневые, дисковые и ротационные. В этих приборах жидкость, заполняя некоторый объем, приводит в действие диск, поршень и подобные элементы, соединенные со счетным устройством. Счетчик учитывает число заполнений за данный промежуток времени, а, следовательно, и количество протекающей через прибор жидкости.
А). Поршневой расходомер.
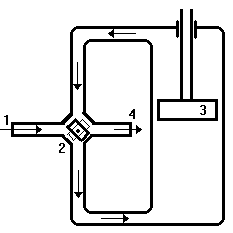
Рис. 26. Поршневой расходомер
Жидкость из трубки 1 через распределительный четырехходовый кран 2 поступает под поршень 3 и стремится его поднять. Поршень, перемещаясь вверх, вытесняет жидкость, находящуюся в верхней полости цилиндра через распределительный кран в трубку 4. Когда поршень достигает верхнего положения, четырехходовый кран, связанный специальным механизмом со штоком поршня, перемещается в положение, показанное тонкой линией. Благодаря этому жидкость из трубки 1 будет поступать в верхнюю полость цилиндра, и поршень начнет перемещаться вниз, а вследствие этого из нижней полости жидкость начнет вытесняться через кран и трубку 4. В момент достижения поршнем крайнего нижнего положения цикл повторяется. Количество жидкости, прошедшей через прибор за определенный промежуток времени, определяется по счетчику, связанному с помощью передаточного механизма со штоком поршня. Точность поршневых расходомеров колеблется в пределах от 1,0 до 1,5%. Они удовлетворительно работают при любой температуре и любой жидкости.
4.2. Скоростные тахометрические расходомеры.
В них движущийся поток жидкости или газа приводит во вращение первичный элемент – ротор, скорость вращения которого является мерой скорости потока. Таким образом, схема расходомера состоит из первичного (приемного) преобразователя - ротора, вторичного тахометрического преобразователя и измерительного прибора с индикаторным или регистрирующим устройством.
Частотная модуляция сигнала датчика (при малой инерционности ротора) позволяет сочетать высокую точность и малую инерционность измерения секундных расходов. В лучших современных конструкциях, предназначенных для измерения расходов в трубопроводах диаметром от 4 до 1000 мм, основная приведенная погрешность доходит до ±0,2%, а постоянная времени прибора составляет менее 0,01 с в широком рабочем диапазоне (до 1: 50 — 1: 80). Еще одно достоинство – независимость работы датчика от давления в потоке и возможность изготовления деталей из материалов, устойчивых к воздействию измеряемых сред.
Конструктивно скоростные тахометрические преобразователи выполняются либо с роторами в виде осевых или тангенциальных миниатюрных крыльчатых турбинок, либо со свободно вращающимися шариками. Прямолопастные осевые турбинки и шарики приводятся в движение с помощью предварительной закрутки потока в тангенциальных камерах или на неподвижных винтовых шнеках. Встречаются конструкции (обычно малых калибров), в которых создается предварительная закрутка потока. В тангенциальных турбинных преобразователях ротор вращается вокруг оси, перекрещивающейся с осью потока; лопасти турбинки выполняются в виде пластин или чашечек. Поток жидкости поступает на лопасти ротора через направляющий аппарат — одноструйный или многоструйный. Первый предпочтительнее при малых диаметрах трубопровода, второй — при средних и больших. Для измерения расходов жидкостей с малыми плотностями (например, жидкий Н2) применяются многороторные крыльчатки: шесть крыльчаток на одной оси. В шариковых тахометрических преобразователях увлекаемый закрученным потоком жидкости шарик движется со скоростью, пропорциональной окружной скорости потока и, следовательно, его объемному расходу. Центробежные силы удерживают шарик на периферии камеры преобразователя и препятствуют уносу его потоком. Шариковые преобразователи уступают крыльчатым в точности (погрешность порядка ±(1,5—2,0)%), имеют повышенные гидравлические потери и узкий диапазон линейности статической характеристики, но зато работоспособны при значительных загрязнениях потока.
Для измеряемых сред с низкой плотностью (например, жидкий водород) применяются многороторные крыльчатки – до 6 на одной оси.
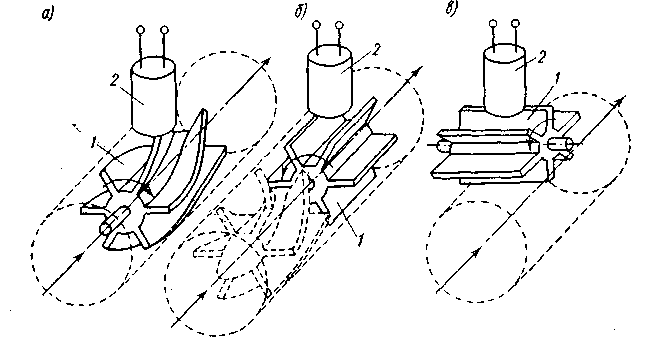
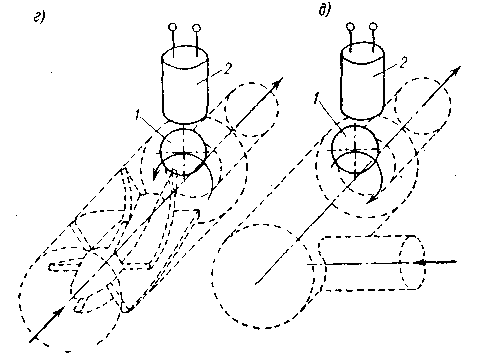
Рис. 27 Основные схемы тахометрических преобразователей расходомеров:
1 — чувствительный элемент; 2 — вторичный преобразователь (тахометр).
При вращении ротора турбинного преобразователя между частотой вращения п и расходом Q для осевой крыльчатки с винтовыми лопастями и тангенциальной крыльчатки существуют следующие связи:
![]() и
и
![]()
где S — площадь живого сечения потока в зоне лопастей крыльчаток; H — ход винтовой нарезки лопастей; Dл — диаметр наибольшей окружности лопастей тангенциальной крыльчатки.
Эти формулы верны при следующих допущениях: не учитывается момент инерции ротора, поток жидкости принят плоским, без отрывов и завихрений, с равномерной по сечению S эпюрой скоростей; измеряемая среда невязкая; поток однофазный, несжимаемый, с постоянной температурой; отсутствуют какие-либо причины, вызывающие торможение ротора; геометрические размеры ротора выполнены идеально, дисбаланс масс отсутствует. Реально ни одно из указанных допущений не может быть полностью выполнено, и действительное значение n будет отличаться от nН. Для количественной оценки разницы частот вращения вводится величина относительной погрешности
![]()
иногда называемая в литературе скольжением ротора относительно потока. Зависимость между расходом и частотой вращения ротора тогда представляется в виде:
![]() и
и
![]()
Таким образом, задача оптимизации реальной конструкции преобразователя сводится к обеспечению наименьшего и постоянного в условиях использования прибора значения δn. Трудности оптимизации заключаются в том, что на определенных режимах измерения, даже в весьма несовершенных конструкциях, может быть легко получена очень малая абсолютная величина δn (~0,03—0,04), хотя при небольших отклонениях от этих режимов значения δ„ могут возрастать почти в 10 раз.
Реальная частота вращения ротора тахометрического преобразователя расходомера находится путем решения уравнения движения, которое записывается в виде
![]()
где MД—движущий момент сил, приложенных со стороны потока к ротору, ΣМcj — сумма моментов сопротивления (моментов, препятствующих вращению ротора). Выражения для MД и Мcj определяются типом и особенностями конструкции тахометрического преобразователя.
Широкое распространение получили индукционные и оптические измерители частоты вращения ротора. Оптические системы (отражающая и просвечивающая) требует изготовления части ротора из прозрачного материала.
В качестве возбудителей сигналов вторичных преобразователей часто используют лопасти крыльчатки ротора. Преобразователи средних калибров как правило, имеют крыльчатки с одинаковыми лопастями, создающими несколько импульсов за один оборот. Роторы преобразователей обычно сборные, из легких материалов (алюминий, пластмасса), а их оси из материалов повышенной износостойкости (например 14Х17Н2).
Наименее удовлетворительно решается вопрос о типе и конструкции подшипниковых узлов ротора. Условия работы их очень тяжелы: частоты вращения от1500 до 35000 об/мин. и более; смазка осуществляется только измеряемыми средами (некоторые из которых для этого непригодны).
В преобразователях малых расходов используются подшипники скольжения из часовых камней; в преобразователях средних калибров (до 60 – 80 мм) – пластмассовые подшипники скольжения или специальные шарикоподшипники; в крупных преобразователях – стандартные или специальные шарикоподшипники.
Недостаток всех типов подшипников заключается в непостоянстве момента сил трения и износа, вызывающим дрейф статических характеристик и ограничивающим ресурс работы. Стабилизация характеристик преобразователя возможна при использовании гидравлической разгрузки опорных подшипников или при отказе от опор и выполнении роторов в виде полностью уравновешенных плавающих элементов.
Наиболее подвержен износу упорный подшипник, воспринимающий осевую составляющую силы воздействия потока. Разгрузка этого подшипника осуществляется разными методами (два магнита – в роторе и ступице, направленных друг к другу одноименными полюсами; может создаваться повышенное давление в зазоре упорного подшипника за счет давления торможения набегающего потока и т.п.).
Безопорные гидравлические уравновешенные роторы расходомеров могут иметь различный вид:
-
Комбинация ротаметра с крыльчато – тахометрическим преобразователем. Здесь расход определяется по частоте вращения ротора, а обтекаемое тело ротаметра играет роль груза, уравновешивающие силы, сносящие ротор. Недостаток – увеличение постоянной времени Т, которая характеризует инерционность преобразователя по характеристике расход – частота вращения ротора.
-
Здесь необходимое для восстановление осевой силы изменение статического давления достигается иначе. Ротор этого преобразователя имеет прямолопастную крыльчатку; перед ним установлен направляющий аппарат 2 в виде неподвижного винтового завихрителя. Пройдя завихритель, поток приобретает вращательное движение, на кинетическую энергию которого расходуется часть потенциальной энергии давления. За ротором расположен струевыпрямитель с лопастями, заходящими на цилиндрический хвостовик ротора. С помощью струевыпрямителя гасится вращательное движение потока и восстанавливается статическое давление. Разность давлений создает уравновешивающую силу, регулирование которой осуществляется воздействием на вспомогательный ответвленный поток. При малом зазоре между ротором и завихрителем во внутренней полости обтекателя устанавливается давление, близкое к полному давлению в потоке перед завихрителем. При смещении ротора вниз по потоку величина вспомогательного потока возрастает, увеличиваются гидравлические потери во входном жиклере, через который вспомогательный поток попадает во внутреннюю полость обтекателя и давление в нем понижается.