

2.4. Построить переходные процессы и определить их показатели (оценить качество процессов регулирования)
Качество процесса регулирования.
Устойчивость является необходимым, но недостаточным свойством автоматической системы регулирования; поскольку в устойчивой системе могут возникать очень медленно затухающие, длительные переходные процессы, возникает необходимость количественно оценить качество процессов регулирования, при устойчивой работе системы.
Одной из характеристик качества процесса регулирования является точность, под которой понимается величина ошибки регулирования в различных установившихся режимах.
В системах стабилизации таким режимом является установившееся состояние (положение равновесия) и точность системы характеризуется величиной статической ошибки Eст. Величину Eст можно найти используя теорему о предельных значениях из теории операционного счисления, по которой устанавливается значение регулируемой величины y∞
![]()
Переходные процессы в статической автоматической системе показаны на следующем рисунке:
Рисунок №21
Если за начало отсчета принимать первоначальное положение равновесия, то при возмущении по заданию (кривая 1) статическая ошибка равновесия y*-y(∞) при других возмущениях.
![]()
Рассматриваемая величина статической ошибки характерна только точностью определения законом регулирования, и не учитывает точность работы измерительных и других приборов и устройств системы.
Если за начало отсчета принимать первоначальное положение равновесия, то при возмущении и по заданию (кривая 1) статистическая ошибка eст = y-y(∞), при других возмущениях eст = y(∞).
Применения П- и ПД-законов регулирования не позволяет избежать статической ошибки (единственное исключение – астатический объект). В реальных системах величина статической ошибки не должна выходить за допустимые пределы. Если допустимая статическая ошибка мала или равна нулю, необходимо применять регулятор с интегральной составляющей в законе регулирования И и ПИД, обеспечивающий регулирование без статической ошибки.
Большинство разработанных и применяемых показателей качества относятся к работе систем в переходных режимах и определяют те или иные параметры переходного процесса. Все показатели качества можно разделить на две группы:
1) Показатели качества, определяемые непосредственно по кривой переходного процесса (переходного процесса вызванного возмущением, т.е. изменением внешнего возмущающего воздействия).
Рисунок № 22
y1 – динамическое отклонение в единицах регулируемой величины, т.е. наибольшее отклонение регулируемой величины от заданного значения в переходном режиме.
tр – время регулирования, продолжительность переходного процесса (определяется до момента, когда отклонение войдет в наперед заданные, необходимые пределы). Временем регулирования характеризуется быстродействие системы.
Ψ
= ![]() – степень затухания.
– степень затухания.
η
=![]() 100%
– перерегулирование.
100%
– перерегулирование.
Интегральный критерий качества –
I1
=![]()
Интегральный квадратичный критерий качества –
I2=![]()
дающий суммарную оценку качеству переходного процесса.
Показатели качества определяемые по косвенным параметрам:
Запас устойчивости по модулю m характеризует собой дополнительное усилие в разомкнутом контуре, который выводит систему на границу устойчивости.
Запас устойчивости по фазе
 φф(γ)
характеризует собой дополнительное
запаздывание при введении которого
система выходит на границу устойчивости,
окружностью единого радиуса.
φф(γ)
характеризует собой дополнительное
запаздывание при введении которого
система выходит на границу устойчивости,
окружностью единого радиуса.
Построим переходные процессы по заданию возмущению когда W(t)=1[t).
Структура системы имеет вид:
Рисунок № 23
Перейдем от изображения к оригиналу и осуществи аналитическое описание системы в непрерывной дискретной форме:
1.
![]()
![]()
![]()
i – дискретное время
t – непрерывное время
![]()
∆t – шаг дискретизации
∆t =1
2.
![]() - в непрерывной форме
- в непрерывной форме
![]()
![]()
![]()
![]()
Необходимо найти все вышеперечисленные данные применительно к нашей системе регулирования, для этого для большего удобства строим таблицу с помощью MS Excel. В таблице вводим формулы и просчитываем их значения при различном времени i. В результате получим график переходного процесса регулирования.
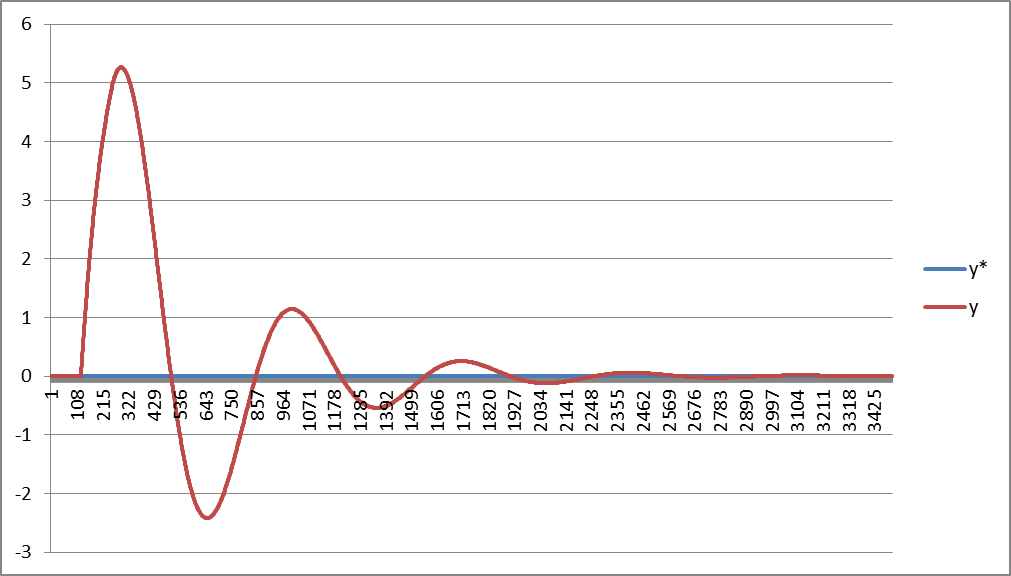
Рисунок №24 – График переходного процесса регулирования
Допустимое значение перерегулирования той или иной САР устанавливается на основании опыта эксплуатации подобных систем. В большинстве случаев запас устойчивости считается достаточным при величине перерегулирования не превышающей 10-30%. В нашем случае величина перерегулирования составляет 43%.