

2.5 Определение вариаций параметров по показателям качества.
По графику переходного процесса САР определяем:
m - запас устойчивости по модулю;
Δ![]() -
запас устойчивости по фазе Δ
-
запас устойчивости по фазе Δ![]() ;
;
m=0,45
Δ
=![]()
3 Синтез и анализ прогнозирующей сар Смита.
3.1 Синтезирование структуры и параметров прогнозирующей сар
Если объект управления с запаздыванием таков, что невозможно измерить никакой величины содержащей запаздывание, то используется регулятор Смита. Идея этого регулятора основана на следующем: если ни одна вспомогательная величина не содержит запаздывания, недоступна для измерения, то ее следует создать искусственно. С этой целью необходимо достаточно точно знать математическую модель объекта и той которая содержит запаздывание, а также нужно знать точно величину запаздывания. Значение реакции системы без запаздывания позволяет регулятору предвидеть будущее поведение системы.
Рассмотрим подробно САР Смита.
y
 *
+
y
*
+
y




 y
- +
y
- +
 прогнозатор
Смита
прогнозатор
Смита





![]()





Рисунок №25
φτ, φ0 – передаточная функция запаздывающей части объекта и объекта без запаздывания.
ƒ – оператор регулирующего блока (например ПИ регулятор)
W– приведенное по входу возмещение.
![]() –
модель объекта управления.
–
модель объекта управления.
Если модель объекта адекватна самому объекту, то
![]() =
=![]() ,
,
φ0=φ0 .
Вначале проанализируем работу регулятора Смита, на основе блок схемы можно записать систему уравнений выхода.
Пусть выполняются условия адекватности, тогда исключая промежуточные переменные получим следующие уравнения:
y(s)
=![]() ∙ y*(s)
+
∙ y*(s)
+ ![]() w(s)
w(s)
если
ƒ(j![]() )
φ(j
)
)
φ(j
)![]() 1,
1,
то
y(s)![]()
![]() (s)
(s)
Таким образом, переходные процессы, вызванные скачкообразным изменением задающего воздействия, заканчиваются за время равное времени запаздывания τ, а переходные процессы вызванные скачкообразным изменением возмещения если объект содержит только запаздывание, то есть φ0=k0 , φ2=e-23 заканчивается в течении 2τ . Следовательно, регулятор Смита оптимален в смысле минимума времени регулирования, так как дальнейшее уменьшение времени не возможно. Убедиться в этом можно с помощью следующего рассуждения.
На прохождение через объект с одним запаздыванием τ возмущающее воздействие затратит время τ.
Таким образом, только через время τ регулятор узнает о действии возмущения. Если регулятор вырабатывает оптимальный управляющий сигнал, то он после прохождения через объект, то есть опять через время τ ликвидирует появившуюся ошибку управления вызванную возмущением, следовательно в сумме окончание переходного процесса может наступить через минимальное время равное 2τ.
3.2 Построение переходного процесса сар Смита
Для того чтобы построить переходный процесс построим дискретные модели.
1)
y(i)=![]() *
y( i-1) +
*
y( i-1) + ![]() (U
( i-
(U
( i-![]() )
+ W (i-
)
+ W (i-![]() )
)
)
)
Где i=0,1…3500
В качестве регулирующего блока рассмотрим ПИ – регулятор:
2)
U(i) = ![]() (i)
+
(i)
+ ![]() (i);
(i);
![]() (i)
=
(i)
= ![]() ;
;
![]() ;
;
![]() ;
;
![]()
3)
![]() (i)
= ε(i) -
(i)
= ε(i) - ![]() ;
ε(i) =
;
ε(i) = ![]() ;
;
4)
![]() ;
;
5)
![]()
Моделируем САР при условии, что наша модель адекватна реальному объекту.
Рассчитываем все вышеперечисленные параметры. По полученным данным строим переходный процесс САР Смита при условии i=0,1…3500.
График переходного процесса САР Смита представлен на рисунке.
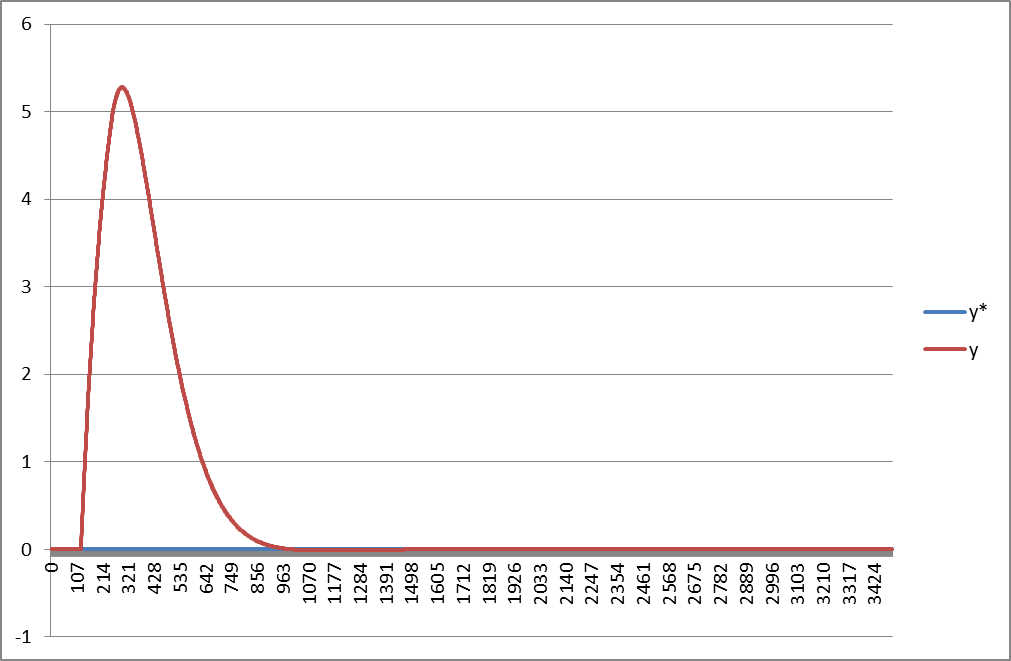
Рисунок №26 - График переходного процесса САР Смита