

ДПТ НВ с резисторами в цепи якоря.
Этот
способ отличается универсальностью и
простотой. Он применяется при невысоких
требованиях к качеству регулирования
и отличается небольшим диапазоном
регулирования (![]() ).
Регулирование осуществляется вниз от
номинальной. При этом жесткость
механических характеристик уменьшается.
Данный способ применяют для машин
небольшой мощности как для регулирования
частоты вращения, так и для плавного
снижения частоты вращения например,
при останове. На практике чаще используют
бесконтактные ключи.
).
Регулирование осуществляется вниз от
номинальной. При этом жесткость
механических характеристик уменьшается.
Данный способ применяют для машин
небольшой мощности как для регулирования
частоты вращения, так и для плавного
снижения частоты вращения например,
при останове. На практике чаще используют
бесконтактные ключи.
Как
видно из уравнения механической
характеристики
![]() при изменении
при изменении
![]() не меняется. По мере увеличения
снижается жесткость и следовательно
снижается стабильность.,
не меняется. По мере увеличения
снижается жесткость и следовательно
снижается стабильность.,
Способы регулирования частоты вращения, при которых допустимый момент остаётся постоянным и равным номинальному, получили в теории электропривода название способов регулирования частоты вращения при постоянном моменте.
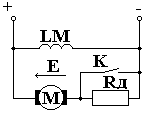
 Обычно
сопротивление
вводимое в цепь якоря секционировано
и изменяется ступенчато. Изменение
скорости привода осуществляется с
помощью контакторов замыкающих секции
сопротивления
.
При этом мы имеем ступенчатое регулирование
скорости. В редких случаях, для машин
малой мощности, применяются жидкостные
или ползунковые реостаты, позволяющие
получать плавное регулирование скорости.
Обычно
сопротивление
вводимое в цепь якоря секционировано
и изменяется ступенчато. Изменение
скорости привода осуществляется с
помощью контакторов замыкающих секции
сопротивления
.
При этом мы имеем ступенчатое регулирование
скорости. В редких случаях, для машин
малой мощности, применяются жидкостные
или ползунковые реостаты, позволяющие
получать плавное регулирование скорости.
Д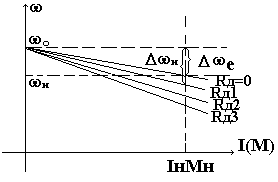 остоинства:
остоинства:
Регулирование плавное вниз от

Простота реализации
Диапазон регулирования
Невысокая стоимость устройства регулирования
Допустимый момент остаётся постоянным и равным номинальному
Недостатки:
Небольшой диапазон регулирования
Мягкие искусственные характеристики
Большие потери в цепи якоря (низкая экономичность)
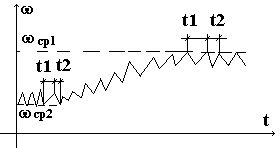
На практике для плавного регулирования скорости используется метод импульсного параметрического регулирования угловой скорости. При этом мы имеем ступенчатое регулирование скорости.
ДПТ НВ при изменении магнитного потока.
Этот
способ широко используется для изменения
частоты вращения двигателя. Он прост,
экономичен (регулирование осуществляется
за счёт слаботочной цепи возбуждения),
регулирование плавное (определяется
возможностями регулировочного реостата),
вверх от номинальной частоты вращения.
Диапазон регулирования
![]() .
Стабильность регулирования скорости
достаточно высокая, правда по мере
уменьшения магнитного потока жесткость
характеристик уменьшается и следовательно
стабильность уменьшается. Такой способ
используется обычно в приводах средней
и большой мощности. Использование
управляемого выпрямителя в качестве
источника питания цепи возбуждения
легко позволяет реверсировать двигатель.
.
Стабильность регулирования скорости
достаточно высокая, правда по мере
уменьшения магнитного потока жесткость
характеристик уменьшается и следовательно
стабильность уменьшается. Такой способ
используется обычно в приводах средней
и большой мощности. Использование
управляемого выпрямителя в качестве
источника питания цепи возбуждения
легко позволяет реверсировать двигатель.
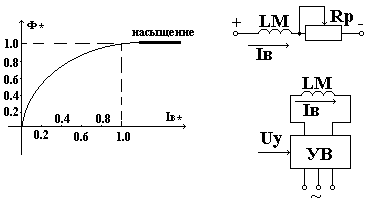 Регулирование
тока возбуждения осуществляется либо
с помощью регулировочного резистора
Регулирование
тока возбуждения осуществляется либо
с помощью регулировочного резистора
![]() ,
включенного последовательно с обмоткой
возбуждения, либо за счёт регулированного
источника питания, в качестве которого
обычно используется управляемый
выпрямитель.
,
включенного последовательно с обмоткой
возбуждения, либо за счёт регулированного
источника питания, в качестве которого
обычно используется управляемый
выпрямитель. 
В связи с этим данный способ регулирования используется для регулирования частоты вращения при постоянной механической мощности нагрузки или в ЭП говорят, что данным способом осуществляется регулирование с постоянной мощностью.
Достоинства:
Регулирование плавное вверх от
Простота реализации
Высокая экономичность,
 изменяется за счет уменьшения тока
возбуждения
изменяется за счет уменьшения тока
возбуждения

Регулировочный реостат вводится в слаботочную цепь
Низкая стоимость устройства регулирования
Диапазон регулирования
Недостатки:
Регулирование
 только вверх от
только вверх от
Мягкие искусственные характеристики дпт нв при изменении напряжения подводимого к якорной цепи. Система преобразователь-двигатель.
Этот способ регулирования частоты вращения является основным, поскольку он позволяет получить высокое качество регулирования при широком диапазоне и высокой жесткости характеристик. Потери мощности на регулировочных характеристиках практически соответствуют потерям мощности в номинальном режиме.
На
базе этого способа создаётся большинство
замкнутых систем регулирования. Для
получения регулируемого напряжения в
якорной цепи используется преобразователь,
в качестве которого обычно выступает
управляемый выпрямитель, а регулирование
частоты вращения осуществляется вниз
от номинальной, поскольку повышать
напряжение выше номинального мы не
имеем права. Допустимый момент на
регулировочных характеристиках
соответствует номинальному
![]() ,
при условии что
,
при условии что
![]() .
.
 В
замкнутой системе регулирования можно
получить диапазон регулирования 1000:1 и
более, так как характеристики могут
быть абсолютно жесткими.
В
замкнутой системе регулирования можно
получить диапазон регулирования 1000:1 и
более, так как характеристики могут
быть абсолютно жесткими.
Потери мощности в якорной цепи при постоянном моменте нагрузки остаются неизменными при регулировании скорости и равны потерям на естественной характеристике. Но поскольку угловая скорость машины в процессе регулирования уменьшается, полезная мощность уменьшается, КПД уменьшается.
Достоинства:
Регулирование плавное вниз от
Большой диапазон регулирования
Регулирование экономичное
Жесткие искусственные характеристики
Недостатки:
Необходим регулируемый источник питающего напряжения (преобразователь).
Система генератор-двигатель.
Первоначально для питания двигателей использовался электромашинный управляемый преобразователь (система генератор-двигатель).
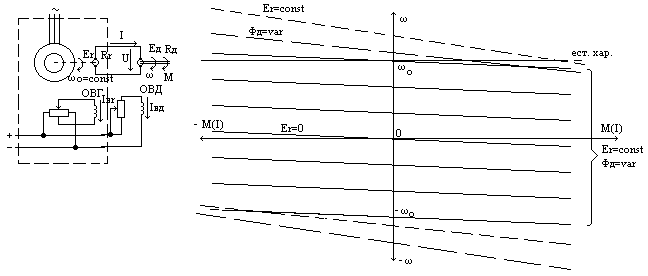
![]() на двигателе, изменяя его полярность
за счёт изменения направления тока в
обмотке возбуждения генератора (ОВГ).
Данная система позволяет обеспечить
все возможные режимы работы двигателя.
Механические характеристики двигателя
располагаются во всех 4 квадрантах.
Основной режим работы двигателя в такой
системе – это работа с постоянным
магнитным потоком.
на двигателе, изменяя его полярность
за счёт изменения направления тока в
обмотке возбуждения генератора (ОВГ).
Данная система позволяет обеспечить
все возможные режимы работы двигателя.
Механические характеристики двигателя
располагаются во всех 4 квадрантах.
Основной режим работы двигателя в такой
системе – это работа с постоянным
магнитным потоком.
Как видим, механические характеристики представляют прямые параллельные линии, наклон которых несколько больше, чем у естественной характеристики двигателя (жесткость меньше). Данная система позволяет осуществить двухзонное регулирование:
1 зона – изменение напряжения (ЭДС генератора);
2 зона – за счёт изменения магнитного потока двигателя при номинальном напряжении (характеристики показаны пунктиром).
Достоинством данной системы является возможность получения линейных непрерывных характеристик во всём диапазоны регулирования.
К недостаткам данной системы можно отнести:
утроенную установленную мощность установленных машин;
низкий КПД;
большая инерционность.