

Дпт нв в системе источник тока – двигатель.
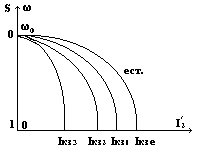
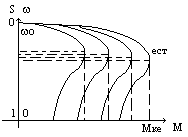
Когда возникает необходимость регулирования момента Д удобно использовать для питания Д преобразователь со свойствами источника тока. Использование такого источника позволяет получить иные электромеханические характеристики, которые имеют следующий вид:
Эти приводы на практике широко применяются в тех случаях, когда приходится поддерживать момент при значительном изменении скорости. К таким приводам относятся приводы различных наматывающих устройств, когда необходимо поддерживать натяжение наматываемого материала.
При необходимости в таких приводах можно получить и горизонтальные участки механической характеристики путем введения нелинейных обратных связей по скорости или напряжению.
Регулирование координат ад с помощью резисторов.
Этот способ регулирования часто называют реостатным. Он заключается в введении резисторов в статорную или роторную цепь Д. Способ очень прост, но сопровождается значительными потерями и не позволяет получить высокое качество регулирования. Здесь можно получить несколько случаев.
1
случай:
включение добавочного резистора
![]() в цепь статора. Этот способ применяется
для ограничения токов в переходный
период. Обычно он используется для Д с
короткозамкнутым ротором.
в цепь статора. Этот способ применяется
для ограничения токов в переходный
период. Обычно он используется для Д с
короткозамкнутым ротором.
 Использовать
этот метод для регулирования частоты
вращения не представляется возможным
из-за малого диапазона регулирования
и малой перегрузочной способности. Этот
способ так же отличает низкая экономичность.
Применяется данный способ, как правило,
лишь для ограничения токов и моментов
при пуске, торможении и реверсе.
Использовать
этот метод для регулирования частоты
вращения не представляется возможным
из-за малого диапазона регулирования
и малой перегрузочной способности. Этот
способ так же отличает низкая экономичность.
Применяется данный способ, как правило,
лишь для ограничения токов и моментов
при пуске, торможении и реверсе.
П римечание:
может быть использовано импульсное
регулирование координат привода за
счет замыкания ключом резисторов
включенных в цепь статора.
римечание:
может быть использовано импульсное
регулирование координат привода за
счет замыкания ключом резисторов
включенных в цепь статора.
2
случай:
этот метод используется только в Д с
фазовым ротором и состоит в введении
добавочного сопротивления
![]() в цепь ротора. При этом электромеханическая
характеристика Д останется такой же,
как и в предыдущем случае, а механическая
будет существенно отличаться.
в цепь ротора. При этом электромеханическая
характеристика Д останется такой же,
как и в предыдущем случае, а механическая
будет существенно отличаться.
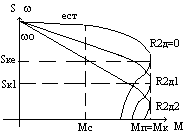
 По
своим возможностям и характеристикам
этот способ соответствует способу
регулирования частоты вращения ДПТ НВ
изменением сопротивления в цепи якоря.
Диапазон регулирования
.
Плавность зависит от плавности изменения
регулировочного резистора
.
Данный способ неэкономичен. Применяется
он при кратковременном регулировании
частоты вращения, а так же для регулирования
тока и момента. В этой схеме возможно
добиться увеличение пускового момента
и при этом перегрузочная способность
Д не меняется. Этот способ широко
используется в крановых Д. Возможно
импульсное регулирование частоты
вращения этим методом.
По
своим возможностям и характеристикам
этот способ соответствует способу
регулирования частоты вращения ДПТ НВ
изменением сопротивления в цепи якоря.
Диапазон регулирования
.
Плавность зависит от плавности изменения
регулировочного резистора
.
Данный способ неэкономичен. Применяется
он при кратковременном регулировании
частоты вращения, а так же для регулирования
тока и момента. В этой схеме возможно
добиться увеличение пускового момента
и при этом перегрузочная способность
Д не меняется. Этот способ широко
используется в крановых Д. Возможно
импульсное регулирование частоты
вращения этим методом.
Достоинства:
Регулирование плавное вниз от
Простота регулирования
Диапазон регулирования
Невысокая стоимость устройства регулирования
Недостатки:
Мягкие искусственные характеристики
Большие потери в цепи якоря (низкая экономичность)
Возможно только в двигателе с фазным ротором
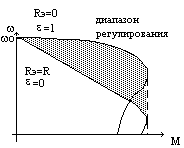
Регулирование координат ад изменением напряжения.
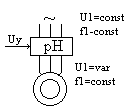 Этот
способ сравнительно прост и дешев и
позволяет регулировать координаты АД
в статическом и динамическом режимах
с хорошими показателями (большие
возможности этого способа проявляются
при использовании замкнутых систем
управления). Суть способа состоит в том,
что с помощью регулятора напряжения
изменяется напряжение на статоре Д. При
этом в качестве регуляторов напряжения
могут использоваться автотрансформатор,
магнитные усилители, тиристорные
регуляторы с напряжения, которые получили
наибольшее распространение.
Этот
способ сравнительно прост и дешев и
позволяет регулировать координаты АД
в статическом и динамическом режимах
с хорошими показателями (большие
возможности этого способа проявляются
при использовании замкнутых систем
управления). Суть способа состоит в том,
что с помощью регулятора напряжения
изменяется напряжение на статоре Д. При
этом в качестве регуляторов напряжения
могут использоваться автотрансформатор,
магнитные усилители, тиристорные
регуляторы с напряжения, которые получили
наибольшее распространение.
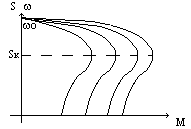
Момент пропорционален квадрату напряжения и, следовательно, при уменьшении напряжения перегрузочная способность Д резко снижается. Для регуляторов частоты вращения в таком виде этот способ не пригоден. Разомкнутая схема управления используется как правило только для ограничения момента в переходных режимах.
При уменьшении напряжения перегрузочная способность Д резко снижается. Для регуляторов частоты вращения в таком виде этот способ не пригоден. Разомкнутая схема управления используется как правило только для ограничения момента в переходных режимах.
 ТРН
обладают большими возможностями не
только с точки зрения регулирования
напряжения на статоре Д. Они позволяют
(часто) обеспечить пуск, реверс и
торможение Д, позволяют сформировать
определенный вид динамических
характеристик и добиться наиболее
экономичного режима работы Д.
ТРН
обладают большими возможностями не
только с точки зрения регулирования
напряжения на статоре Д. Они позволяют
(часто) обеспечить пуск, реверс и
торможение Д, позволяют сформировать
определенный вид динамических
характеристик и добиться наиболее
экономичного режима работы Д.