

Замкнутые системы управления электроприводом. Система автоматического управления регулируемого электропривода с суммирующим усилителем.
В системах стабилизации скорости используют ООС по скорости, ООС по напряжению и ПОС по току. В системах стабилизации момента наоборот используют ПОС по скорости и напряжению и ООС по моменту.
 Датчики
ОС обычно полагают безинерционными. В
качеств датчиков ОС в системах ЭП обычно
используют тахогенераторы, делители
напряжения, шунты или трансформаторы
тока.
Датчики
ОС обычно полагают безинерционными. В
качеств датчиков ОС в системах ЭП обычно
используют тахогенераторы, делители
напряжения, шунты или трансформаторы
тока.
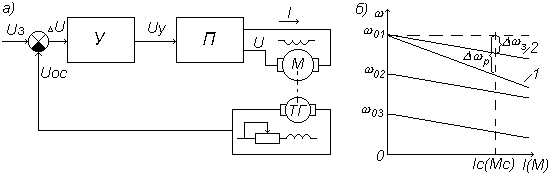
В данной схеме частота вращения ДПТ НВ регулируется за счет изменения напряжения U, подаваемого на якорь двигателя. Питание двигателя осуществляется от преобразователя П, напряжение на выходе которого U равно напряжению на якоре и определяется сигналом управления Uу, подаваемым на преобразователь. Напряжение управления снимается с усилителя, сигнал на входе которого U=Uз - Uос складывается из сигнала задания Uз и сигнала обратной связи Uос. Сигнал обратной связи (ОС) снимается с тахогенератора (ТГ), расположенного на валу двигателя, и пропорционален частоте вращения двигателя Uос=kос. Коэффициент пропорциональности кос называется коэффициентом ОС по частоте вращения и он может регулироваться за счет изменения тока возбуждения ТГ.
В случае одновременного регулирования нескольких координат ЭП, например, момента (тока) и частоты вращения двигателя, используются чаще всего системы управления с подчиненным регулированием координат.
Комбинированные обратные связи.
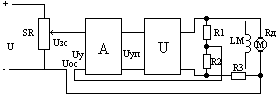
Распространение получили комбинации ООС по скорости или напряжению и ПОС по току. При этом ОС по напряжению или скорости принимается сильной, а связь по току - слабой. Поэтому на верхних скоростях диапазона регулирования, когда статизм удовлетворяет заданию, действие ОС по току слабее, а на нижних скоростях диапазона, когда напряжение на якоре снижено, основную роль играет токовая ОС. Нелинейность характеристик усилителя и преобразователя не сказывается при малых напряжениях, поэтому токовые ОС стремятся использовать при низких скоростях. Комбинация ОС по току и напряжению получила распространение в виде ОС по ЭДС Д.
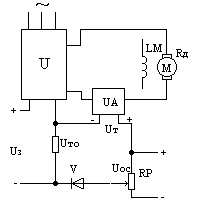
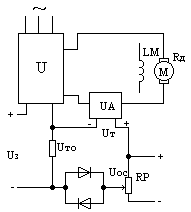
Датчиком
противоЭДС в этой схеме является
уравновешенный тахометрический мост:
![]() .
.
Связь по ЭДС Д обеспечивает стабилизацию скорости с точностью ниже, чем связь по скорости с тахогенератором. Обусловлено это тем, что не учитывается реакция якоря и падение напряжения в щеточном контакте. Используется такая ОС в тех случаях, когда не предъявляется высоких требований к регулированию частоты вращения, или нет возможности установить тахогенератор.
Характеристика обратных связей.
ОС |
Статизм
|
Достоинства |
Недостатки |
Примечание |
О |
|
Высокая точность стабилизация скорости. |
Наличие тахогенератора. |
Широкое. |
ООС по U |
|
Простота измерения напряжения. |
Невысокая точность стабилизации скорости. |
Ограниченное, при невысоких требованиях к стабилизации скорости. |
ПОС по I |
при
|
Простота измерения тока. |
Зависимость
точности стабилизации скорости от
нелинейности характеристик усилителя
и преобразователя.Не обеспечивает
стабилизацию при колебаниях
|
В чистом виде не применяется. |
О |
|
Сравнительная простота измерения ЭДС. |
Невысокая точность стабилизации из-за не учета реакции якоря и падения напряжения в щеточном контакте. |
Применяется при невысоких требованиях к стабилизации и небольшом диапазоне регулирования. |
 ОС
по
ОС
по
 ОС
по E
ОС
по E