

Регулирование частоты вращения ад изменением частоты питающей сети.
 Этот
способ позволяет получить жесткие
механические характеристики в широком
диапазоне регулирования частоты
вращения. Суть метода состоит в том, что
синхронная скорость
Этот
способ позволяет получить жесткие
механические характеристики в широком
диапазоне регулирования частоты
вращения. Суть метода состоит в том, что
синхронная скорость
![]() зависит от частоты питающей сети, изменяя
которую мы можем в широком диапазоне
изменять
зависит от частоты питающей сети, изменяя
которую мы можем в широком диапазоне
изменять
![]() .
Правда, необходим преобразователь,
позволяющий плавно и в широком диапазоне
изменять частоту питающей сети. В
настоящее время, в качестве преобразователей
применяются чаще всего тиристорные
преобразователи частоты. Вместе с тем,
задача регулирования частоты
.
Правда, необходим преобразователь,
позволяющий плавно и в широком диапазоне
изменять частоту питающей сети. В
настоящее время, в качестве преобразователей
применяются чаще всего тиристорные
преобразователи частоты. Вместе с тем,
задача регулирования частоты
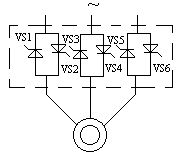
![]() не так проста. Уменьшая частоту питающей
сети для сохранения постоянным магнитного
потока необходимо одновременно снижать
и приложенное к статору напряжение, то
есть возникает необходимость двухканального
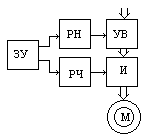
управления АД. С помощью регулятора
напряжения воздействуя на управляемый
выпрямитель изменяем напряжение на
статоре Д, а с помощью регулятора частоты
воздействуя на инвертор изменяем частоту
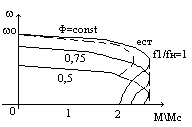
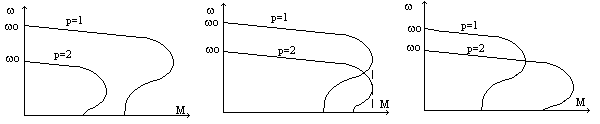
питающей сети. При регулировании частоты
питающей сети, в зависимости от характера
изменения момента сопротивления
нагрузки, приходится менять напряжение
питания по определенному закону для
того, что бы сохранить перегрузочную
способность Д во всем диапазоне
постоянной. Механические характеристики
Д будут выглядеть следующим образом
при
не так проста. Уменьшая частоту питающей
сети для сохранения постоянным магнитного
потока необходимо одновременно снижать
и приложенное к статору напряжение, то
есть возникает необходимость двухканального
управления АД. С помощью регулятора
напряжения воздействуя на управляемый
выпрямитель изменяем напряжение на
статоре Д, а с помощью регулятора частоты
воздействуя на инвертор изменяем частоту
питающей сети. При регулировании частоты
питающей сети, в зависимости от характера
изменения момента сопротивления
нагрузки, приходится менять напряжение
питания по определенному закону для
того, что бы сохранить перегрузочную
способность Д во всем диапазоне
постоянной. Механические характеристики
Д будут выглядеть следующим образом
при
![]() .
.
П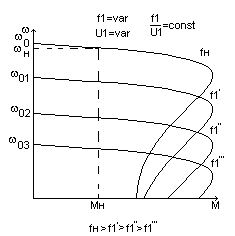 ри
уменьшении частоты
ри
уменьшении частоты
![]() получим семейство характеристик, которые
располагаются ниже естественной и имеют
постоянный критический момент.
Характеристики жесткие, регулирование
плавное и экономичное. На практике
иногда используют двухзонное регулирование.
При этом вторую зону получают при
увеличении частоты сверх номинальной,
но поскольку пропорциональное увеличение
напряжения недопустимо, то выполняют
при
получим семейство характеристик, которые
располагаются ниже естественной и имеют
постоянный критический момент.
Характеристики жесткие, регулирование
плавное и экономичное. На практике
иногда используют двухзонное регулирование.
При этом вторую зону получают при
увеличении частоты сверх номинальной,
но поскольку пропорциональное увеличение
напряжения недопустимо, то выполняют
при
![]() .
При этом перегрузочная способность
снижается.
.
При этом перегрузочная способность
снижается.
В
некоторых случаях используются системы
с IR-компенсацией, которые за счет ПОС
по току позволяют компенсировать падение
напряжения на активном сопротивлении
статора
![]() ,
и тем самым обеспечить более строгий
закон изменения напряжения при
регулировании скорости Д.
,
и тем самым обеспечить более строгий
закон изменения напряжения при
регулировании скорости Д.
Достаточно
хорошие результаты дает так же поддержание
постоянным абсолютного скольжения.
Если это удастся, то соответственно
удастся стабилизировать и магнитный
поток. Обычно
![]() измеряется косвенным способом по частоте
вращения ротора.
измеряется косвенным способом по частоте
вращения ротора.
Таким образом, когда необходима высокая точность регулирования частоты вращения необходимо использовать либо IR-компенсацию, либо стабилизацию абсолютного скольжения.
Достоинства:
Регулирование плавное в широком диапазоне
Возможно регулирование вверх от
Регулирование экономичное
Жесткие искусственные характеристики
Недостатки:
Необходим сложный и дорогой преобразователь
Используется чаще всего в замкнутых системах ЭП
Регулирование частоты вращения ад изменением числа пар полюсов.
Так
как
![]() ,
то изменяя число пар полюсов можно
регулировать частоту вращения. Так как
число пар полюсов
,
то изменяя число пар полюсов можно
регулировать частоту вращения. Так как
число пар полюсов
![]() может быть только целым, то регулирование
ступенчатое,
а так как изменение
не приводит к изменению параметров Д,
то получаем естественные характеристики.
может быть только целым, то регулирование
ступенчатое,
а так как изменение
не приводит к изменению параметров Д,
то получаем естественные характеристики.
Изменяя число пар полюсов можно регулировать частоту вращения. Регулирование ступенчатое, а так как изменение не приводит к изменению параметров Д, то получаем естественные характеристики. Регулирование экономичное. Сложность состоит в создании многосекционной обмотки на статоре, переключение которой можно было бы изменять число полюсов.
Для регулирования этим способом используются Д с короткозамкнутым ротором, обмотка которых приспосабливается к переключаемой обмотке статора. У Д с фазным ротором пришлось бы делать такую же многосекционную обмотку но роторе как и на статоре.
1. Схема соединения «звезды» на «треугольник»
2. Схема соединения «звезды» на «двойную звезду»
3. Схема соединения «треугольника» на «двойную звезду»
|
|
|
|
||
соединение полуобмоток |
соединение фаз |
соединение полуобмоток |
соединение фаз |
||
1 |
последовательное |
звезда |
параллельное |
треугольник |
|
2 |
последовательное |
звезда |
параллельное |
двойная звезда |
|
3 |
последовательное |
треугольник |
параллельное |
двойная звезда |
|
 №
№
М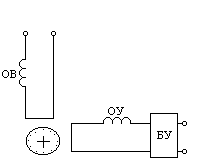 оменты
развиваемые Д с различными схемами
соединения обмоток отвечающие разным
числам полюсов относятся как соответствующие
магнитные индукции:
оменты
развиваемые Д с различными схемами
соединения обмоток отвечающие разным
числам полюсов относятся как соответствующие
магнитные индукции:
![]() .
Подбирая схему переключения обмоток
можно подобрать вид механической
характеристики наилучшим образом
соответствующую характеру нагрузки,
что и является важнейшей задачей.
.
Подбирая схему переключения обмоток
можно подобрать вид механической
характеристики наилучшим образом
соответствующую характеру нагрузки,
что и является важнейшей задачей.
На практике многоскоростные Д выпускаются на 2, 3 и 4 скорости, что соответствует на 1 и 2 обмотки на статоре.
Достоинства:
Характеристики жесткие
Регулирование экономичное
Недостатки:
Регулирование ступенчатое
Возможно только в многоскоростных двигателях