

методички / 4037
.pdf8. Вычислить максимальное значение напряжения в опасном сечении и проверить условия прочности для принятого поперечного сечения рамы.
Пример. Расчетная схема рассматриваемой системы показана на рис. 1. Под действием периодической возмущающей нагрузки рама совершает колебательное движение.
Рис. 1. Расчетная схема периодической нагрузки на раму
Пренебрегая внутренним трением материала рамы и ее собственным весом, упругие перемещения сечений 1 и 2 по принципу независимости действия сил записываются в виде:
{ |
11 1( ) + δ12 |
2( ) + 1. = 1( ) |
(1) |
|
21 1( ) + δ22 |
2( ) + 2. = 2( ), |
|
где δik – перемещение i-го сечения от статической единичной силы, приложенной в k-м сечении (i = 1,2; k = 1,2) по направлению соответствующей инерционной силы; 1. , 2. – перемещения сечений 1 и 2 от всех динамических нагрузок. При этом
|
1. = 1,0 |
р |
|
|
|||
{ 2. = 02,р ; |
(2) |
||||||
где |
|
|
|
|
|
|
|
|
= |
0 |
+ |
0 |
|
||
{ |
1. |
11 |
1 |
12 |
2 |
(3) |
|
2. |
= |
0 |
+ |
0 . |
|||
|
21 |
1 |
22 |
2 |
|
||
С учетом выражений (2) и (3) и m1 = m2 = m уравнение (1) в стационарном режиме колебаний можно переписать в виде:
( − ) 0 |
+ δ 0 |
+ |
|
= 0 |
|
|||
11 |
1 |
|
12 2 |
1. |
|
|
||
{ |
0 |
+ (δ |
|
− ) 0 |
+ |
2. |
= 0 , |
(4) |
21 |
1 |
22 |
2 |
|
|
|
||
где = 1 2.
21
Решая систему уравнений (4) определяют амплитудные значения инерционных нагрузок (способом Крамера):
0 |
=Di/D (i = 1,2), |
(5) |
1 |
|
|
где приняты следующие обозначения:
D = 11 22 |
− 122 ; |
1 = 12 02, − 22 1,0 |
; |
2 = 21 1,0 |
− 11 02, ; |
11 = 11 − ; 22 = 22 − .
Учитывая, что в данном случае P1 = P2, амплитуды динамического прогиба и изгибающего момента в произвольном i-м (i = 1,2,..n) сечении могут быть определены по формулам:
|
|
|
|
|
д = |
|
( 0 + 0) + δ ( 0 + 0) |
|
|||||||||
|
|
|
|
|
|
11 |
|
|
1 |
|
|
|
|
12 |
2 |
|
|
|
|
|
|
{ д = |
( 0 |
+ 0) + M |
( 0 + 0) . |
(6) |
|||||||||
|
|
|
|
|
|
|
11 |
|
1 |
|
|
|
|
12 |
2 |
|
|
Уравнения движения (4) при свободных колебаниях рамы, т.е. при P1 = P2 = 0, |
|||||||||||||||||
принимают вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
{ 11 1( ) + δ12 2( ) = 1( ) . |
(7) |
|||||||||||
|
|
|
|
|
|
( ) + δ |
22 |
( ) = ( ) |
|
||||||||
|
|
|
|
|
21 |
|
1 |
|
|
|
|
|
2 |
|
2 |
|
|
Относительно амплитуды перемещения последняя система уравнений |
|||||||||||||||||
преобразуется в виде: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
{ |
|
0 |
+ δ |
|
0 |
= 0 |
, |
(8) |
|||
|
|
|
|
|
|
11 |
1 |
|
12 |
2 |
= 0 |
||||||
|
|
|
|
|
|
|
δ |
|
|
0 |
+ |
0 |
|
|
|||
|
|
|
|
|
|
|
21 |
1 |
|
22 |
2 |
|
|
|
|||
где |
= |
− ; |
= |
|
− ; = |
|
|
1 |
. |
|
|
|
|
|
|
||
|
|
2 |
|
|
|
|
|
|
|||||||||
11 |
11 |
22 |
22 |
|
|
|
|
|
|
|
|
|
|
|
|||
Здесь ω – частота собственных колебаний рамы.
Система алгебраических уравнений (8) относительно амплитуды перемещения сосредоточенных масс имеет различные решения. Очевидное решение 10 = 20 = 0 свидетельствует об отсутствии движения системы и не подходит по смыслу поставленной задачи.
Система (8) может иметь решения, отличные от нулевого, лишь в том случае, когда ее определитель равен нулю, т.е. когда выполняется условие:
. |
D(ω) = | 11 − |
|
12 |
| =0 |
(9) |
|
|
|
|
− |
|
|
|
|
21 |
22 |
|
|
|
|
|
22 |
|
|
|
|
|
Раскрыв определитель (9), получим квадратное уравнение относительно λ. После определения λ с учетом (8) вычисляются собственные частоты ω1< ω2.
Первая частота ω1 называется частотой основного тона собственных колебаний. Каждой частоте соответствует определенная форма колебаний системы. Форму колебания можно изобразить графически. Для этого в уравнения (8) следует подставить значение
λi (i = 1, 2), причем:
|
|
|
λi |
= |
1 |
|
|
|
(10) |
||||
|
|
|
|
|
|
|
. |
||||||
|
|
|
|
|
2 |
||||||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
При этом одно из двух уравнений (8) становится лишним. Пренебрегая первым |
|||||||||||||
уравнением (8), из второго получим: |
|
|
|
|
|
|
|
|
|
|
|
||
|
0 |
|
|
|
21 |
2 |
|
|
|
|
|
||
|
2 |
= − |
|
1 |
|
|
|
, (i = 1,2). |
(11) |
||||
|
0 |
|
|
|
|
|
2 |
|
|||||
|
|
|
22 |
−1 |
|
|
|
||||||
|
1 |
|
2 |
|
|
|
|
|
|
|
|
||
После чего, задавая значение yii (i = 1,2), можно вычислить y12 в долях y22, а y21 – в долях y11 и изобразить графический характер возможной формы колебаний первого и второго тона колебаний.
Формы колебаний должны быть ортогональны. Условие ортогональности собственных форм записывается в виде:
∑2 |
0 |
= 0 |
( , = 1,2; ≠ ). |
(12) |
=1 |
|
|
|
|
Определив собственные частоты ω1 и ω2 и вычислив частоту вынужденных колебаний θ, необходимо сопоставить θ с ближайшей из ω1 или ω2. Во избежание наступления резонансных колебаний рекомендуется, чтобы θ отличалась от любой из частот ω1, ω2 не менее чем на 30 %. Если при решении задачи окажется, что это требование не выполняется, то следует изменить значение ω1или θ. Этого можно достичь путем:
-изменения геометрических или физико-механических характеристик материалов элементов рамы;
-уменьшения или увеличения частоты вращения вибратора.
При этом во всех случаях напряжения в опасных сечениях рамы должны удовлетворять условиям прочности.
Переходим к численной реализации решения в соответствии с постановкой задачи.
1. Определение частот и периодов собственных колебаний рассматриваемой системы
Предварительно определим изгибную жесткость элементов заданной системы:
EJ = 2EJk = 2·2,1 ·108 ·3,29 ·10–4=13,489 104 кН м2.
Заданная система один раз статически неопределима. Основная система метода сил представлена на рис. 2, а. Эпюра моментов в основной системе от действия силы Х1 = 1 показана на рис. 2, б, а от единичных внешних сил – на рис. 3, а, б.
23
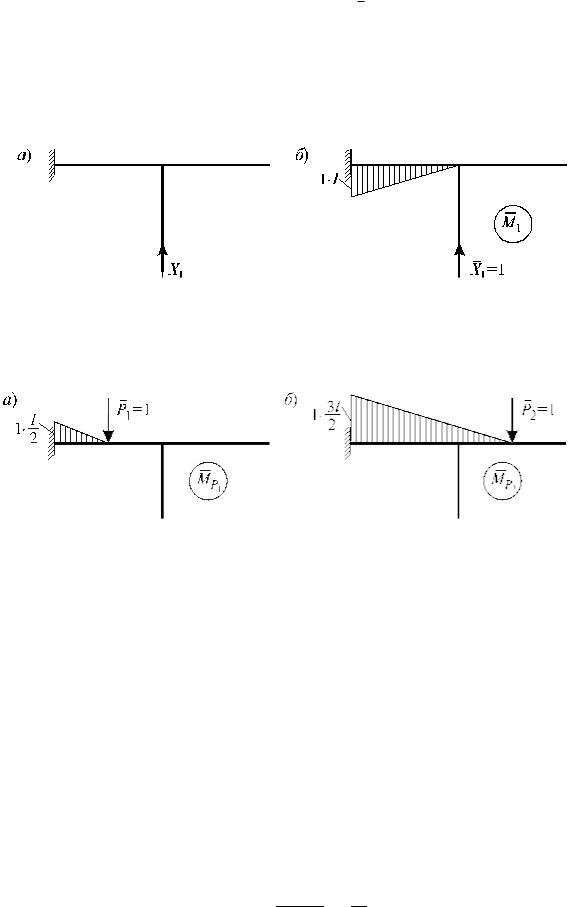
Сначала рассчитываем раму на действие силы P1 = 1. Каноническое уравнение метода сил в данном случае записывается в виде:
1 |
|
+ |
= 0. |
(13) |
11 |
1(1) |
1 |
|
|
|
|
1 |
|
|
Рис. 2. Система метода сил
Рис. 3. Эпюры изгибающих моментов
Коэффициенты 1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
и находим перемножением эпюр М1 |
и М |
по формуле Мора. |
|||||||||||||||||||||||||||||||||||
|
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
Здесь 1 |
|
|
|
|
|
||||||||||||||||||||||||||||||||
определяется как результат перемножения эпюры М1 (рис. 2, б) самой на |
|||||||||||||||||||||||||||||||||||||
|
|
11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
себя, 1 |
|
как результат перемножения эпюры М1 |
(рис. 2, б) с МР |
|
(рис. 3, а). |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
= |
1 |
|
(1 · ) · · |
1 |
· |
|
2 |
· = |
3 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
11 |
|
|
|
|
|
|
2 |
|
|
|
3 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
{ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(14) |
|||||||||||||
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
5 3 |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
= − |
|
· |
· (1 · |
) · |
|
· |
|
· = |
. |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
2 |
2 |
|
2 |
|
6 |
48 |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
С учетом (14) из решения (13) получим:
5 3·3 51(1) = 48 · 3 = 16.
Эпюра изгибающих моментов в заданной системе от действия сил Р1 = 1 и Х1 = 5/16 изображена на рис. 4, a.
24

Рис. 4. Эпюры моментов при единичных нагрузках
Рассчитываем раму на действие силы Р2 = 1. Каноническое уравнение метода сил в данном случае принимает вид:
|
|
|
1 |
|
+ |
|
= 0. |
|
|
(15) |
||||||||
|
|
|
|
11 |
1(2) |
|
|
|
1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
Здесь 1 |
определяется |
как |
результат |
перемножения |
эпюры моментов, |
|||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
изображенных на рис. 2, б и 4, б, в соответствии с формулой Мора: |
|
|||||||||||||||||
|
|
|
= |
− |
1 |
· |
1 |
· · · |
7 |
· = − |
7 3 |
(16) |
||||||
|
|
|
|
|
|
|
|
|
. |
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||
|
1 |
|
|
|
|
2 |
|
|
|
6 |
|
12 |
|
|||||
|
|
2 |
|
|
|
|
|
|
|
|
||||||||
С учетом значения 111 из (15) и значения 1 2 из (15) и из (16) получим:
7 3·3 71(1) = 12 · 3 = 4.
Эпюра изгибающих моментов от действия сил Р2 = 1 и Х1 = = 7/4 в заданной системе изображена на рис. 4, б.
Единичное перемещение δ11 определяется по формуле Мора в результате перемножения эпюры МР1 самой на себя, применяя формулы умножения двух эпюр моментов в виде двух трапеций на произвольном участке. Получим:
δ11 = 1 [36 · (2 · 89 · 89 + 2 · 1516 · 1516 − 89 · 1516 − 1516 · 89) + 36 · (2 · 1516 · 1516)] =
= 1 · 1,969 = 13,818·101,969 4 = 14,25 · 10−6м/кН.
Единичное перемещение δ22 определяется по формуле Мора перемножением эпюры МР2 самой на себя (рис. 4, б):
25

δ22 = |
|
1 |
[ |
6 |
· (2 |
· |
3 |
· |
|
3 |
+ 2 · 3 · 3 − |
3 |
· 3 − 3 · |
3 |
) + |
3 |
· (2 · 3 · 3)] = |
||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
2 |
|
|
6 |
|||||||||||||||||
|
|
|
6 |
|
2 |
|
|
2 |
2 |
|
|
||||||||||||
= |
1 |
|
· 22,5 = |
|
1 |
|
· 22,5 = |
22.5 |
|
= 162,83 · 10−6м/кН. |
|||||||||||||
|
|
|
2 |
|
|
4 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
13,818·10 |
|
|
|
|
|
||||||||
Единичное |
перемещение |
δ12 |
определяется |
по формуле Мора в результате |
|||||||||||||||||||
перемножения эпюр МР |
и МР , изображенных соответственно на рис. 4, а, б: |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
δ22 = 1 [36 · (−2 · 89 · 32 − 2 · 1516 · 34 + 89 · 34 + 1516 · 32) + 36 · (−2 · 1516 · 34 − 1516 · 3)] =
= − 1 · 3,375 = − 2 1 · 3,375 = −24,425 · 10−6м/кН.
Решив уравнение (16), получим:
(δ |
11 |
+δ |
22 |
)±√(δ |
11 |
+δ |
)2−4(δ |
11 |
δ |
22 |
−δ2 |
||
λ1,2 = |
|
|
|
22 |
|
|
12 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
λ1,2 = 177,1·10−6±156,4·10−6. 2
Окончательно λ1 = 166,75·10–6 м/кН; λ2 = 10,35·10–6 м/кН.
По формуле (11) определяется значение собственной частоты рассматриваемой
рамы:
1 |
|
|
|
9,81 |
|
|
|||
ω1 = √ |
|
|
= √ |
|
|
= √ |
|
= 54,24 c 1; |
|
|
1 |
|
1 |
20·166,75·10−6 |
|||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
9,81 |
|
|
|||
ω2 = √ |
|
|
= √ |
|
|
= √ |
|
= 217,7 c 1. |
|
|
2 |
|
2 |
20·10,35·10−6 |
|||||
|
|
|
|
|
|
|
|
||
Периоды собственных колебаний рассматриваемой системы принимают значения:
T1= |
2 |
= 0,116 c; |
T2= |
2 |
= 0,029 c. |
|
|
||||
|
1 |
|
2 |
||
2. Определение амплитуды собственных колебаний и графическое изображение собственных форм
Для вычисления значения отношений амплитуды собственных колебаний, предварительно определив m = 20/9,81≈ 2,04 кН∙с2/м, имеем при 110 = 1 и при 220 = 1, соответственно:
0 |
= − |
21 12 |
|
= − |
|
2,04·24,425·10−6·54,242 |
= − |
0,1412 |
= −6,201; |
|||||||||||||
|
2 |
|
|
|
−6 |
|
|
2 |
|
|
|
|
||||||||||
|
21 |
|
|
|
|
|
|
|
|
|
−1 |
|
|
0,02275 |
|
|
||||||
|
|
|
|
22 1−1 |
2,04·162,83·10 ·54,24 |
|
|
|
|
|
||||||||||||
0 |
= − |
22 12−1 |
= − |
2,04·162,83·10−6·217,72−1 |
= − |
14,74 |
= 6,201. |
|||||||||||||||
|
|
−6 |
|
|
|
|
2 |
|
|
|||||||||||||
12 |
|
|
|
|
|
2 |
|
|
|
2,04·24,425·10 |
|
|
|
|
|
2,362 |
|
|||||
|
|
|
|
1 |
|
|
|
|
·217,7 |
|
|
|||||||||||
|
|
|
|
21 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
26 |
|
|
|
|
|
|
|
|
|
|
|
|
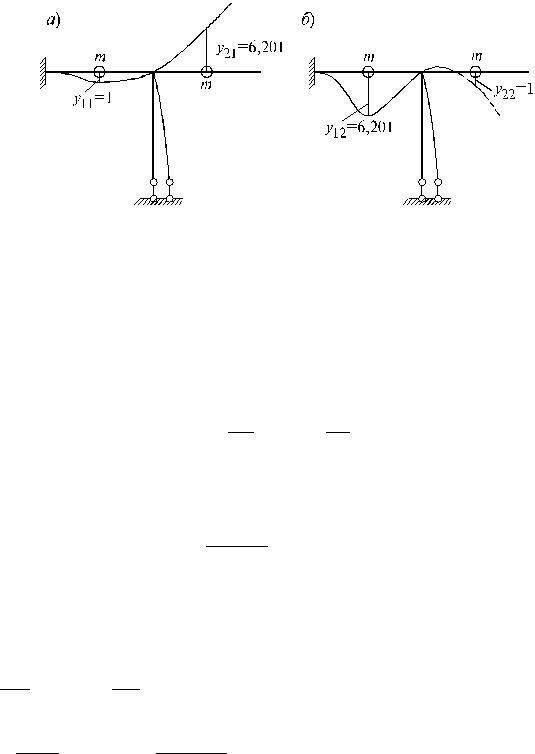
Формы собственных колебаний рассматриваемой системы изображены на рис. 5 (а – первая форма; б – вторая форма).
3. Проверка ортогональности собственных форм колебаний
Из условия ортогональности (12) имеем:
m( 110 120 + 210 220 ) = (1,0 · 6,201 − 1,0 · 6,201) = 0,
Рис. 5. Перемещения рамы при нагрузках
4. Определение круговой частоты вынужденных колебаний и изображение примерного вида графика коэффициента динамичности в зависимости от отношения частот вынужденных и собственных колебаний
В стационарном режиме круговая частота вынужденных колебаний системы имеет значение:
= 260 = 6,28 · 60060 = 62,8 c–1.
Сопоставим величину θ с величиной ближайшей собственной частоты рамы ω1:
Δ=62,8−59,862,8 · 100% = 4,94 < 30.
Во избежание резонансных колебаний надо изменить величину ω1 или θ. В данном случае, принимая n = 900 об/мин, получим:
θ=260 = 6,28 · 90060 = 94,2 c–1;
= − 1 · 100% = 94,2−59,894,2 · 100% = 35,52 > 30.
27

Следовательно, при θ = 94,2 с–1 принятое условие во избежание резонансных колебаний выполняется.
Примерный вид графика коэффициента динамичности в зависимости от θ/ω1 изображен на рис. 6.
Рис. 6. График зависимости k от θ
5. Определение амплитудных значений инерционных сил
В соответствии с принятым обозначением по формулам (10) и (11) последовательно определяем:
11 |
|
= 11 |
− |
|
|
|
1 |
|
|
= 14,25 · 10−6 − |
|
1 |
|
|
= −41,0 · 10−6 м/кН; |
|||||||||||||||||
|
|
|
2 |
|
|
|
2 |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2,04·94,2 |
|
|
|
|
|||||||
22 |
|
= 22 |
− |
|
1 |
|
= 162,83 · 10−6 − |
1 |
|
|
|
= 107,59 · 10−6 м/кН; |
||||||||||||||||||||
|
|
|
|
2 |
2,04·94,2 |
2 |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
0 |
|
|
|
0 |
|
|
|
0 |
|
2 |
|
|
|
|
|
|
1,2 |
2 |
|
|
−2 |
|
|
||||||||
|
|
|
= |
|
|
= |
|
|
|
|
|
|
= |
|
|
|
· 94, 2 · 1,5 · 10 |
|
|
|
= 16,28 кН; |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
9,81 |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
= |
|
|
0 |
+ |
|
0 |
= 16,28 · (14,25 − 24,425) · 10−6 = −1,66 · 10−4 м/кН; |
|||||||||||||||||||||
1. |
|
|
11 |
|
1 |
|
|
|
|
|
|
12 |
|
|
2 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
= |
|
0 |
+ |
|
|
0 |
= 16,28 · (−24,425 + 162,83) · 10−6 = 22,53 · 10−4 м/кН; |
|||||||||||||||||||||
2. |
|
|
21 |
|
1 |
|
|
|
|
|
22 |
|
2 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
= |
|
0 |
|
− |
0 |
|
|
= (−24,425 · 22,53 + 107,59 · 1,66) · 10−10 = −3,72 · 10−8 м2/кН; |
||||||||||||||||||||||
1 |
|
|
12 |
|
2, |
|
|
|
|
|
22 |
|
1, |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
= |
|
0 |
|
− |
0 |
|
|
= (24,425 · 1,66 + 41,0 · 22,53) · 10−10 = 9,64 · 10−8 м2/кН; |
||||||||||||||||||||||
2 |
|
|
21 |
|
1, |
|
|
|
|
|
11 |
|
2, |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
= |
|
|
|
|
− 2 |
|
= (−41,0 · 107,59 − 24,4252) · 10−12 = −0,5 · 10−8 м2/кН; |
|||||||||||||||||||||||
1 |
|
|
11 |
22 |
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
По (9) определяем амплитудные значения инерционных сил:
10= | 1|= |3,720,5 |= 7,44 кН;20= | 2|= |9,640,5 |= 19,28 кН.
6. Определение эпюры изгибающих моментов от действия собственного веса вибраторов и амплитудных значений изгибающих моментов при вынужденном стационарном режиме колебания рамы
Значение изгибающих моментов, возникающих от действия собственного веса вибраторов, в произвольном сечении определяется по формуле:
ст = |
+ |
=G( |
+ |
). |
|
|
1 |
2 |
1 |
2 |
|
|
|
28 |
|
|
|
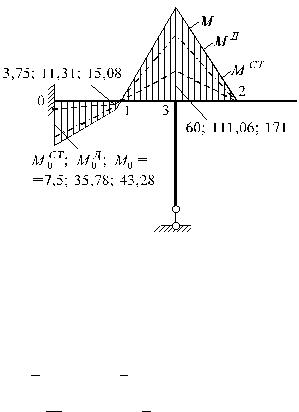
Определяем значение ст в характерных сечениях (0; 1; 2; 3) рамы (см. рис. 5):
сечение 0: 0ст = 20·(9/8 – 3/2) = –7,5 кН/м; сечение 1: 1ст= 20·(–15/16 + 3/4) = –3,75 кН/м;
сечение 2: 2ст = 0; сечение 3: 3ст = 20·(0 + 3) = 60 кН/м.
Эпюра изгибающих моментов ст приведена на рис. 7.
Амплитудные значения изгибающих моментов от действия внешних динамических и инерционных нагрузок в соответствии с (13) определяются:
д = |
( 0 |
+ 0) + |
( 0 |
+ 0) = |
(7,44 + 16,28) + |
(19,28 + |
|||
|
1 |
1 |
1 |
2 |
2 |
2 |
1 |
2 |
|
+16,28) = 23,72 1 + 35,56 2.
Рис. 7. Эпюра д
Согласно последней формуле д |
в характерных сечениях имеет следующие |
|
|
значения: |
|
сечение 0: M0д = 23,72 · 89 − 35,56 · 32 = −26,7 кН/м;
сечение 1: M1д = −23,72 · 1516 + 35,56 · 34 = 4,4 кН/м;
сечение 2: M2д= 0;
сечение 3: 3д = 23,72 · 0 + 35,56 · 3 = 107,0 кН/м.
Эпюра д изображена на рис. 7.
7. Построить эпюру моментов при одновременном действии статических и динамических сил и определить положение опасного сечения конструкции
Результирующее значение изгибающих моментов, действующих в характерных сечениях при одновременном действии статических и динамических нагрузок, определяется по формуле:
|
= ст + д. |
|
|
|
|
|
29 |
|
Эпюра Mk, как и эпюры ст и д, изображены на рис. 7.
Из рис. 7 согласно эпюре М следует, что наиболее опасным является сечение 3.
8. Определение максимального напряжения и проверка условий прочности в наиболее опасном сечении
= |
3 |
= |
167 |
|
= 53185 кН/м2 |
= 53,2МПа <R = 190 МПа. |
|
|
−2 |
||||
3 |
2 |
|
2·0,157·10 |
|
|
|
|
|
|
|
|
|
|
Следовательно, условие прочности рассматриваемой рамы обеспечено.
Практическая работа № 6
РАСЧЕТ ВИБРОИЗОЛЯЦИИ
Расчет виброгасящих оснований
При работе большинства машин возникают динамические нагрузки, обусловленные неуравновешенными силами инерции. Эти силы могут вызвать недопустимые колебания строительных конструкций и оказать вредное действие на организм человека. Допускаемые амплитуды виброперемещения по ГОСТ12.1.12-78 приведены в табл. 1.
|
|
Таблица 1 |
|
Допускаемые значения амплитуды виброперемещения |
|
|
|
|
Частота |
Амплитуда виброперемещения, мм |
|
гармонической |
|
|
На постоянных рабочих местах |
В производственных помещениях |
|
составляющей, Гц |
в производственных помещениях |
без вибрирующих машин |
|
|
|
2 |
1,4 |
0,57 |
4 |
0,25 |
0,1 |
8 |
0,063 |
0,025 |
16 |
0,0282 |
0,0112 |
31,5 |
0,0141 |
0,0056 |
63 |
0,0072 |
0,0028 |
|
|
|
Для уменьшения колебаний строительных конструкций и расположенных на них рабочих мест машины, возбуждающие динамические нагрузки, устанавливают на массивные фундаменты.
Массу фундамента подбирают таким образом, чтобы колебания подошвы фундамента не превышали (по виброперемещению) установленных для заданной частоты величин.
30