

11. Основные особенности (свойства) нелинейной системы. Типовые нелинейности сау. Задачи нелинейной тау.
Если система содержит хотя бы одно НЗ, то она называется нелинейной САУ.
Нелинейные системы часто встречаются на практике. Вообще большинство САУ является нелинейными и лишь для упрощения задач анализа и синтеза проводится их линеаризация, то есть НЗ заменяется приближенным линейным при ограниченных пределах изменения входной величины.
Существуют нелинейные объекты регулирования. Кроме того, НЗ вводят в систему преднамеренно для улучшения качества процесса регулирования.
Задачи нелинейной ТАУ
1. Учет влияния сопутствующих нелинейностей (люфт, сухое трение, насыщение усилителей и т.д.), отбрасываемых при исследовании линеаризованных систем, разработка методов исключения их вредного влияния.
Наличие нелинейных зависимостей изменяет только количественные характеристики процессов в системах. Необходимо учесть их влияние или спроектировать систему так, чтобы процессы в ней не выходили из границ линейности характеристик элементов.
2. Разработка методов анализа и синтеза так называемых существенно нелинейных систем или систем с преднамеренными (специально вводимыми) нелинейностями. Преднамеренные нелинейности позволяют получить качество, недостижимое в линейных системах. К этим системам относятся релейные (программное управление), оптимальные, самонастраивающиеся.
ТАУ нелинейных систем имеет особенности:
1. При анализе процессов в нелинейных системах нельзя использовать принцип суперпозиции, так как в нелинейных системах качественные показатели переходной характеристики зависят от уровня входного сигнала.
Это затрудняет исследование нелинейных систем. И для нелинейных систем теряют смысл показатели качества систем при единичном входном воздействии, такие как tр и σ%.
2. В нелинейных САУ иначе рассматривается вопрос устойчивости. Если в линейных САУ незатухающие колебания являются признаком неработоспособности системы, то в нелинейных системах такой режим является допустимым, а иногда и единственно возможным и под устойчивостью в этом случае понимается устойчивость автоколебаний.
3. Нелинейные системы описываются нелинейными дифференциальными уравнениями и сложность решения нелинейных дифференциальных уравнений привела к созданию ряда приближенных методов.
Существует аналитические, графические методы, а также широко применяют ЭВМ.
Для решения задач анализа и синтеза систем разработаны методы:
Точные: метод припасования, метод фазовой плоскости.
Приближенные: метод гармонической линеаризации, метод гармонического баланса, метод статистической линеаризации.
12. Преобразование нелинейных звеньев. Методы исследования нелинейных САУ. Их краткая характеристика
Преобразование нелинейных звеньев может быть осуществлено тремя методами:
1. Последовательное соединение:

Представляет
интерес такое последовательное соединение
нелинейностей, которое дает в результате
линейное (рис. 7.3): ![]()
Чтобы
в результате соединения двух нелинейных
звеньев получить линейное необходимо
выполнение соотношения ![]() откуда
откуда ![]() т.е. функция
т.е. функция ![]() должна быть взаимообратной к функции
должна быть взаимообратной к функции
![]()
2. Параллельное соединение:

Выходная величина определяется выражением y f1 x f 2 x
Представляет
интерес такое параллельное соединение
звеньев, когда в результате получается
линейная система ![]() Операторы,
удовлетворяющие этому условию, называются
взаимодополняющими.
Операторы,
удовлетворяющие этому условию, называются
взаимодополняющими.
3. Обратная связь
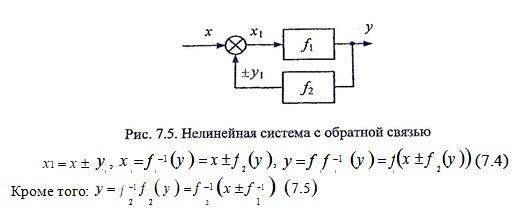
Сравнивая (7.4) с (7.5), можно сделать вывод, что эквивалентными являются следующие преобразования: звенья прямой и обратной связи можно поменять местами с заменой их характеристики на обратную.
Для
отрицательной обратной связи:
![]()
Разделив
числитель и знаменатель на ![]() получим:
получим: ![]()
Из
(7.4) и (7.5) следует, что для того, чтобы
нелинейная система стала линейной,
необходимо чтобы ![]()
Таким образом, если некоторая нелинейность не желательна, ее можно компенсировать либо последовательным, либо параллельным включением, либо включением в обратную связь другой нелинейности.
Методы исследования нелинейных САУ. Их краткая характеристика.
Методы интегрируемой аппроксимации:
К методам интегрируемой аппроксимации относятся методы линейной, кусочно-линейной и нелинейной интегрируемой аппроксимации.
Принцип первого вида аппроксимации основывается на допущении, что основные параметры системы имеют постоянное значение, соответствующее выбранной точке, что позволяет применить методику линейного анализа. Последний имеет силу лишь для ограниченной зоны вблизи рабочей точки (малые сигналы или малые отклонения или же малая степень нелинейности).
Второй вид аппроксимации предназначен для случая сравнительно больших сигналов и заключается в составлении линейных дифференциальных уравнений для каждого прямолинейного участка, на которые разбита нелинейная характеристика. Общее решение сводится в этом случае к решению ряда однородных линейных уравнений. Требуемый объем вычислений обычно велик, особенно если система высокого порядка или нелинейность таковы, что для точной аппроксимации требуется разбивка характеристики на большое число линейных отрезков.
В случае применения третьего вида аппроксимации решение уравнения находят путем замены характеристики нелинейного элемента некоторой близкой к ней кривой, которая может быть описана аналитически. Таким образом приводится замена «точного2 уравнения приближенным, которое может быть точно проинтегрировано что практически является не менее точным, чем приближенное решение «точного» уравнения.
Численно-графические методы:
Исследование нелинейных систем может проводиться путем численных и графических методов моделирования нелинейных дифференциальных уравнений.
Целесообразно проводить расчет нелинейной системы комбинированным путем, т.е. предварительно использовать приближенный метод, а затем для уточнения проводят расчет численным или графическим путем.
Известен целый ряд численных методов: Эйлера, разложения в ряд Тейлора, численного интегрирования по разностному способу Адамса, с применением z-преобразования и т.д. Имеются достаточно простые графические методы: секущих. Касательных. Метод с использованием
решения уравнения в конечных разностях. Иногда вместо трудоемких численно-графических методов может быть применено моделирование, позволяющее получить большое число вариантов решения нелинейных задач.
Методы малого параметра:
Методы малого параметра можно разделить на две подгруппы: аналитические и графоаналитические. Наибольшее распространение в инженерной практике получили графоаналитические методы Гольдфарба и Попова , базирующиеся на принципе гармонического баланса.
Общая идея метода малого параметра основана на том, что ряд членов входящих в левую часть дифференциального уравнения нелинейных систем, можно считать малыми по сравнению с остальными членами, в основном определяющими характер движения системы. Поэтому рассматривают упрощенные без малых членов, как уравнения, близкие к нелинейным – квазилинейную систему.
Методы малого параметра являются приближенными, так как позволяют определить лишь приближенные значения амплитуды и частоты основной гармоники периодических колебаний. При периодических сигналах на входе нелинейного звена на выходе последнего будут иметь место несинусоидальные величины, которые можно разложить на основную и высшие гармоники. Если высшими гармониками пренебречь, а рассматривать только основную гармонику, то можно вычислить комплексный коэффициент усиления нелинейного звена по первой гармонике, который является своеобразным аналогом передаточной функции.
Методы моделирования
Исключительно важное значение для анализа и синтеза нелинейных систем имеют методы моделирования на аналоговых и цифровых вычислительных машинах.
Поскольку сложная нелинейная задача не может быть решена в общем виде, то для нахождения приемлемого варианта нужно решить значительное число частных задач. Подобная работа проще всего может быть выполнена на моделирующей установке. С ее помощью можно смоделировать весьма сложные системы со многими нелинейностями и обследовать широкую область начальных условий и внешних возмущений, причем коррекцию целесообразно выполнять при помощи последовательных приближений.
В некоторых случаях существенные черты влияния нелинейностей проще раскрываются при помощи фазовой характеристики, а не переходной. Поэтому предварительное изучение задачи тем или иным методом может дать значительную экономию машинного времени.