

13. Методы исследования нелинейных сау
Среди методов исследования выделяют:
-
Точные методы – метод фазовой плоскости, метод точечных преобразований, метод припасовывания, методы А.М. Ляпунова и В.М. Попова.
-
Приближенные методы – различные методы линеаризации (метод гармонической линеаризации).
Состояние САУ в любой момент времени характеризуется значением выходной координаты и (n-1) ее производных. В результате образуется n-мерное пространство, которое называется базовым. Точка, указывающее текущее состояние системы, называется изображающей.
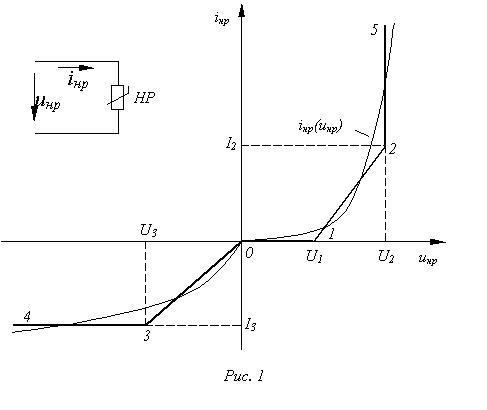
Метод линейной аппроксимации
-
соответствии с определением данного метода, расчет нелинейной цепи с его использованием включает в себя в общем случае следующие основные этапы:
-
Исходная характеристика нелинейного элемента заменяется ломаной линией с конечным числом прямолинейных отрезков.
-
Для каждого участка ломаной определяются эквивалентные линейные параметры нелинейного элемента и рисуются соответствующие линейные схемы замещения исходной цепи.
-
Решается линейная задача для каждого отрезка в отдельности.
-
На основании граничных условий определяются временные интервалы движения изображающей точки по каждому прямолинейному участку (границы существования отдельных решений).
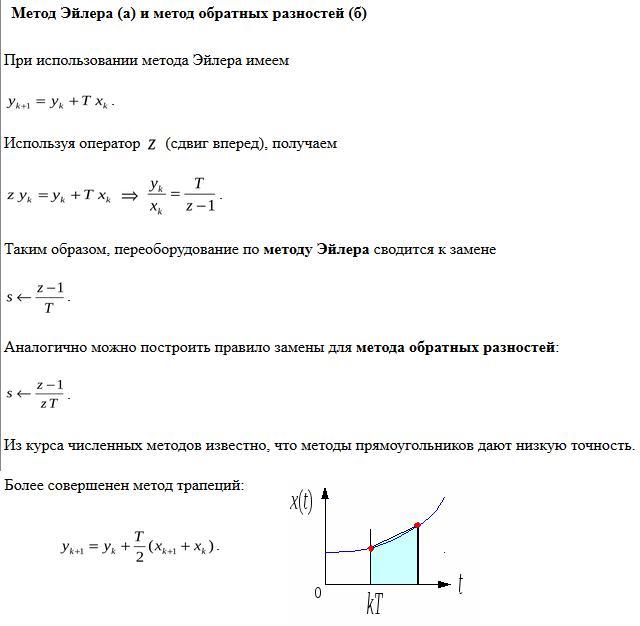
14. Численно-графические методы исследования. Метод Эйлера.
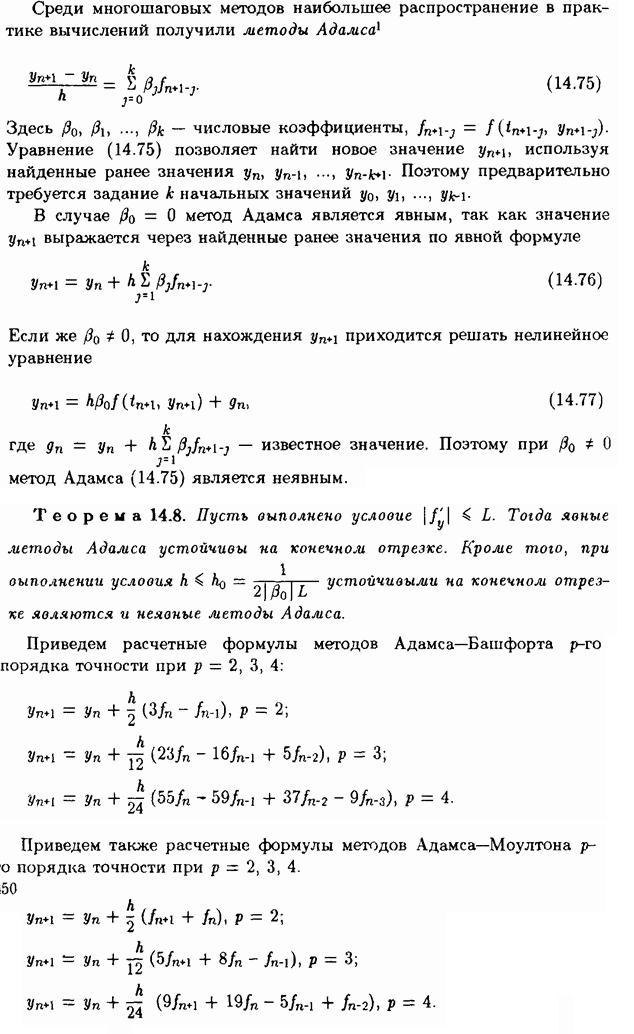
15. Численно-графические методы исследования. Метод Адамса. Решение уравнений выше первого порядка.
16. Основы метода фазовых траекторий
Исследование нелинейных систем автоматического управления связано с необходимостью составления и решения нелинейных дифференциальных уравнений. Поскольку единого общего решения для нелинейных дифференциальных уравнений разного вида не существует, то не представляется возможным создание обобщенного метода теории управления для исследования нелинейных систем, подобно случаю обыкновенных линейных систем.
Для исследования нелинейных систем в теории автоматического управления разработаны и используются частные методы, каждый из которых обладает определенными возможностями и эффективен в некоторой ограниченной области задач исследования. Наибольшее применение находят метод фазовых траекторий и амплитудно–частотный метод (метод гармонической линеаризации). Оба эти метода будут рассмотрены далее.
Метод фазовых траекторий заключается в том, что поведение исследуемой нелинейной системы рассматривается и описывается не во временной области (в виде уравнений процессов в системе), а в фазовом пространстве системы (в виде фазовых траекторий).
Состояние нелинейной системы автоматического управления характеризуется с использованием фазовых координат системы
![]()
задающих вектор состояния системы в фазовом пространстве системы
Y (y1, y2, y3,...yn).
При введении в рассмотрение фазовых координат нелинейное дифференциальное уравнение порядка n для свободного процесса в нелинейной системе
![]()
преобразуется к системе из n дифференциальных уравнений первого порядка
-
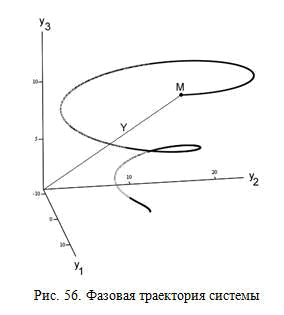
ходе процесса в системе фазовые координаты yi изменяются и вектор состояния системы Y описывает годограф в n– мерном фазовом пространстве системы (рис. 56). Годограф вектора состояния (траектория движения изображающей точки M, соответствующей концу вектора) есть фазовая траектория системы. Вид фазовой траектории однозначно связан с характером процесса в системе. Поэтому о свойствах нелинейной системы можно судить по ее фазовым траекториям.
У равнение
фазовой траектории может быть получено
из приведенной выше системы уравнений
первого порядка, связывающих фазовые
координаты и учитывающих свойства
системы, путем исключения времени.
Фазовая траектория не отображает время
процессов в системе.
равнение
фазовой траектории может быть получено
из приведенной выше системы уравнений
первого порядка, связывающих фазовые
координаты и учитывающих свойства
системы, путем исключения времени.
Фазовая траектория не отображает время
процессов в системе.
Связь между фазовой траекторией y(x) и процессом x(t) поясняет рис. 57. Фазовая траектория построена в фазовых координатах 0XY, где x – выходная величина системы, y – скорость изменения выходной
величины (первая производная x’). Переходный процесс x(t) построен в координатах x–t (выходная величина – время).
П ример.
Рассмотрим
в качестве примера систему,
свободный
процесс в которой
описывается
дифференциальным уравнением второго
порядка
ример.
Рассмотрим
в качестве примера систему,
свободный
процесс в которой
описывается
дифференциальным уравнением второго
порядка
где u(t) выходная величина системы.
Введем в рассмотрение фазовые координаты x=u(t) и y=du/dt. Теперь систему можно описать с учетом фазовых координат
Чтобы получить уравнение фазовой траектории из приведенной системы уравнений необходимо исключить время. В рассматриваемом случае это можно сделать, разделив первое уравнение на второе
![]()
-
результате получено дифференциальное уравнение первого порядка, функция решения которого y(x)+C, где C – постоянная интегрирования, описывает фазовую траекторию. Порядок полученного дифференциального уравнения ниже порядка исходного уравнения для процесса в системе, следовательно, решить это уравнение проще.
Фазовая траектория описывается
дифференциальным уравнением, решения которого содержат постоянные
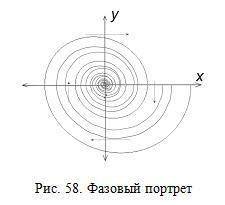
интегрирования. Постоянные интегрирования зависят от начального состояния исследуемой системы в момент воздействия возмущения. Следовательно, система описывается множеством подобных фазовых траекторий, построенных для разных начальных условий и отличающихся разными значениями постоянной интегрирования C (рис. 58). Эта совокупность фазовых траекторий, построенных для системы при разных
начальных условиях, получила название фазового портрета системы.
При использовании метода фазовых траекторий для исследования нелинейных систем необходимо строить и исследовать фазовые траектории. Практическое графическое построение фазовой траектории возможно только на фазовой плоскости, т.е. в случае описания исследуемой системы только двумя фазовыми координатами. Указанное обстоятельство ограничивает возможность применения метода фазовых траекторий системами второго порядка. В случае описания исследуемой системы дифференциальным уравнением выше второго порядка, это уравнение приходится упрощать и сводить к уравнению второго порядка, что неизбежно ведет к возрастанию погрешности исследования.