

1.1. Сила. Система сил. Рівновага абсолютно твердого тіла
Одним з основних понять механіки і, зокрема, статики є поняття сили.
В механіці під силою розуміють міру механічної взаємодії матеріальних тіл, в результаті якої тіла, що взаємодіють, можуть надавати одне одному прискорення, або деформуватися.
Така взаємодія є досить різною за своєю фізичною природою. Для розв'язування задач механіки якісна сторона цих різноманітних явищ несуттєва, достатньо охарактеризувати їх з кількісної сторони, користуючись поняттям сили, як деякої універсальної абстракції, в рівній мірі придатної для кількісної оцінки різних механічних взаємодій.
Сила є векторною величиною, яка характеризується:
напрямом (лінією дії);
числовим значенням (модулем);
точкою прикладання.
 LM
—
лінія
дії сили. Довжина відрізку АВ,
що
відображає силу, в певному масштабі
дорівнює модулю сили. Сила позначається
латинською літерою зі стрілкою над нею.
Модуль позначається латинською
літерою без стрілки (рис. 1.1).
LM
—
лінія
дії сили. Довжина відрізку АВ,
що
відображає силу, в певному масштабі
дорівнює модулю сили. Сила позначається
латинською літерою зі стрілкою над нею.
Модуль позначається латинською
літерою без стрілки (рис. 1.1).
Для вимірювання величини сили необхідно дати спосіб порівняння довільної сили з деякою одиничною силою. За одиницю сили приймають таку силу, яка масі в 1 кг надає прискорення 1 м/с2, така одиниця сили зветься ньютоном (Н).
Рис. 1.1
(1.1)
![]()
де
![]() ,
,![]() ,
,![]() -
проекції сили на осі
координат.
-
проекції сили на осі
координат.
Сукупність
декількох сил
(![]() ),
прикладених до тіла, точки чи системи
точок, називається системою сил.
),
прикладених до тіла, точки чи системи
точок, називається системою сил.
Якщо, не порушуючи стану тіла, одну систему сил
(
)
можна замінити іншою системою сил (![]() )
і
навпаки и, то такі системи сил називаються
еквівалентними.
)
і
навпаки и, то такі системи сил називаються
еквівалентними.
Символічно це позначається наступним чином:
Рис. 1.2![]() (1.2)
(1.2)
В
тому випадку, коли система сил (![]() )
еквівалентна
одній
силі
)
еквівалентна
одній
силі ![]() ,
тобто
,
тобто
![]() (1.3)
(1.3)
останню називають рівнодійною даної системи сил. В подальшому буде показано, що не всяка система сил має рівнодійну.
Другим важливим поняттям статики є поняття абсолютно твердого тіла.
Тіло, в якому відстань між двома його будь-якими точками зберігається постійно, називається абсолютно твердим тілом.
В природі не існує абсолютно твердих тіл, тому це поняття є ідеалізацією дійсності. Оскільки, реальні тверді тіла зазвичай мало змінюють свою форму під дією прикладених до них сил, тому для розв'язання багатьох задач механіки можна нехтувати малими деформаціями і користуватись уявленням про абсолютно тверде тіло.
Якщо
абсолютно тверде тіло залишається у
стані спокою при
дії
на нього системи сил (![]() ),
то останню називають врівноваженою
системою сил, еквівалентною
нулю.
),
то останню називають врівноваженою
системою сил, еквівалентною
нулю.
![]() (1.4)
(1.4)
В такому випадку говорять, що тіло перебуває у рівновазі.
1.2. Аксіоми статики та їх наслідки
Аксіомами статики називають ті загальні закони, яким підлягають сили, діючі на одне і те ж тіло, або ж сили, прикладені до взаємодіючих тіл. Ці закони встановлені багатьма безпосередніми спостереженнями, а також дослідною перевіркою наслідків, які логічно випливають з цих аксіом.

Аксіома 1. Дві сили, прикладені до абсолютно твердого тіла, взаємно зрівноважуються (еквівалентні нулеві) тоді і лише тоді, коли вони рівні за величиною і діють вздовж однієї прямої у протилежних, напрямках, (рис. 1.3).
а)
З цієї аксіоми випливає наслідок - силу можна переносити вздовж: лінії її дії в яку завгодно точку тіла без порушення його рівноваги.
б)
Рис. 1.3
Рис. 1.4
Дійсно,
нехай сила
![]() ,
прикладена в т. А
(рис.
1.4, а). Прикладемо в т. В
на
лінії дії
,
прикладена в т. А
(рис.
1.4, а). Прикладемо в т. В
на
лінії дії
![]() дві
зрівноважені сили
дві
зрівноважені сили
![]() і
і
![]() ,
маючи на увазі, що
,
маючи на увазі, що
![]() (рис. 1.4, б). Тоді, згідно з аксіомою 2
будемо
мати
(рис. 1.4, б). Тоді, згідно з аксіомою 2
будемо
мати
![]() .
Оскільки сили
.
Оскільки сили![]() і
і
![]() складають
зрівноважену систему сил (аксіома 1), то
згідно аксіоми 2 їх можна відкинути
(рис. 1.4, в).
складають
зрівноважену систему сил (аксіома 1), то
згідно аксіоми 2 їх можна відкинути
(рис. 1.4, в).
Таким чином
![]()
Цей наслідок показує, що сила прикладена до абсолютно твердого тіла, являє собою ковзний вектор.
 Аксіома
3 (про паралелограм сил). Рівнодійна
двох сил, що прикладені до однієї
матеріальної точки під деяким кутом
одна до одної, за величиною та напрямом
визначається діагоналлю паралелограма,
побудованого на векторах, які
зображають дані сили (рис.
1.5).
Аксіома
3 (про паралелограм сил). Рівнодійна
двох сил, що прикладені до однієї
матеріальної точки під деяким кутом
одна до одної, за величиною та напрямом
визначається діагоналлю паралелограма,
побудованого на векторах, які
зображають дані сили (рис.
1.5).
Рис. 1.5![]() рівнодійну
двох даних сил
рівнодійну
двох даних сил
![]() і
і
![]() то на підставі цієї аксіоми
то на підставі цієї аксіоми
![]() (1.5)
(1.5)
Ця операція називається геометричним додаванням за правилом паралелограма.
Модуль рівнодійної визначається за наступною формулою
![]() (1.6)
(1.6)
З
аксіоми паралелограма сил випливає
правило
векторного складання сил, прикладених
в одній точці твердого тіла (рис.
1.6), що дозволяє будь-яку кількість
таких сил складати геометричне. Для
цього достатньо побудувати векторний
многокутник, приєднуючи послідовно до
першої сили
![]() вектор, геометричне рівний вектору
другої сили
вектор, геометричне рівний вектору
другої сили
![]() і т.д. (рис. 1.7). Вектор, проведений з точки
прикладання першої сили в останню
Bt
чу
побудованого многокутника, є рівнодійною
і т.д. (рис. 1.7). Вектор, проведений з точки
прикладання першої сили в останню
Bt
чу
побудованого многокутника, є рівнодійною
![]() ,
рівною
,
рівною
 (1.7).
(1.7).
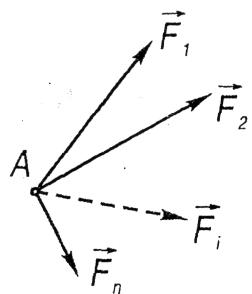

Рис. 1.6
Рис. 1.7

Рис. 1.8
Одержаний таким чином многокутник називається многокутником сил або силовим многокутником.
Якщо остання вершина многокутника сил збігається з першою, то многокутник називається замкнутим (рис 1.8, б). В цьому випадку рівнодійна дорівнює нулю:
 (1.8)
(1.8)
а
система сил (![]() )
є
зрівноваженою
(рис.
1.8, а).
)
є
зрівноваженою
(рис.
1.8, а).
Замкнутість силового многокутника виражає умову рівноваги сил, прикладених, в одній точці твердого тіла, в графічній формі.
Аксіома 4. Сили, з якими два тіла взаємодіють між собою, завжди рівні за величиною і протилежні за напрямом.
Дана аксіома є третім законом Ньютона - законом рівності дії і протидії.
Важливо пам'ятати, що дія і протидія являють собою дві сили, прикладені завжди до різних тіл, тому ці сили не утворюють систему взаємно зрівноважених сил.
Аксіома 5. Рівновага тіла, що деформується, не порушиться, якщо жорстко зв'язати його точки і вважати його абсолютно твердим.
Цю аксіому називають принципом отвердіння. Умови рівноваги тіл. що деформуються, необхідні, але недостатні.
Приклад:

Для нитки додаткова умова - сили повинні тільки розтягувати, а не стискати нитку.
Теорема про три непаралельні сили
Опираючись на аксіоми, доведемо теорему про три непаралельні сили, яка корисна при визначенні напрямів дії невідомих сил:
Якщо під дією трьох сил тіло перебуває в рівновазі і лінії дії двох сил перетинаються, то всі сили лежать в одній площині і їх лінії дії перетинаються в одній точці.


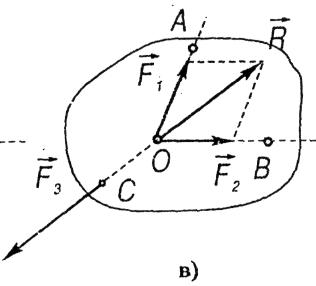
Рис. 1.9
Нехай
задане тіло перебуває у рівновазі під
дією трьох сил
![]() ,
прикладених в точках А,
В, С (рис.
1.9, а), причому лінії дії
сил
,
прикладених в точках А,
В, С (рис.
1.9, а), причому лінії дії
сил![]() і
і![]() перетинаються
в точці О.
Згідно
наслідку аксіоми 2 сили
перетинаються
в точці О.
Згідно
наслідку аксіоми 2 сили
![]() і
і
![]() можна перенести в точку О
(рис.
1.9, б), а за аксіомою 3 їх можна замінити
однією силою
можна перенести в точку О
(рис.
1.9, б), а за аксіомою 3 їх можна замінити
однією силою
![]() (рис.
1.9, в), причому
(рис.
1.9, в), причому![]() .
.
Таким
чином, дана система сил приведена до
двох сил
![]() і
і
![]() (рис. 1.9, в). За умовами теореми тіло
перебуває у рівновазі, отже згідно
аксіоми 1 сили
(рис. 1.9, в). За умовами теореми тіло
перебуває у рівновазі, отже згідно
аксіоми 1 сили
![]() і
і
![]() мають бути рівні за модулем, протилежно
направленими і діяти вздовж однієї
прямої. Це означає, що лінія дії сили
мають бути рівні за модулем, протилежно
направленими і діяти вздовж однієї
прямої. Це означає, що лінія дії сили
![]() повинна проходити через точку О,
що
і потрібно було довести.
повинна проходити через точку О,
що
і потрібно було довести.
1.3 В'язі та їх реакції. Дві основні задачі статики
При розгляданні різних систем сил. прикладених до абсолютно твердого тіла, увагу необхідно приділити таким двом питанням:
Як дану систему сил замінити найбільш простою, їй еквівалентною?
Які умови рівноваги тіла, на яке діє задана система сил?
При розв'язуванні першої задачі статики припустимо, що всі
сили, які діють на тіло, відомі. При розв'язуванні другої задачі частина сил може бути невідома.
Невідомими силами, в більшості випадків, є сили взаємодії інших тіл, які дотикаються до даного тіла. Такі сили називають реакціями.
1.3.1 Невільне тверде тіло. Види в'язей і напрям їхніх реакцій
Тіло, яке може рухатися в будь-якому напрямку, називається вільним.
Тіло, яке, торкаючись до даного тіла, обмежує його рух в будь-якому із напрямків, називається в'яззю. Якщо рух тіла в будь-якому напрямку обмежений, то таке тіло називається невільним.
Всі сили, що діють на невільне тверде тіло, поряд із розподілом на зовнішні та внутрішні, можна також поділити на задані або активні сили і реакції в'язей.
Задані сили виражають дію на тверде тіло інших тіл, які викликають або спроможні викликати зміну його кінематичного стану.
Реакцією в'язі називається сила або система сил, яка виражає механічну дію в'язі на тіло.
Реакція в'язі завжди направлена в сторону, протилежну неможливому руху.
Одним із основних положень механіки є принцип звільнення твердих тіл від в'язей, згідно якого невільне тверде тіло можна розглядати як вільне, на яке, крім заданих сил, діють реакції в'язей.
Статика розглядає переважно невільні тіла, тобто тіла, які певним чином закріплені. Правильне визначення напрямку реакції цього закріплення (в'язі) має дуже велике значення при розв'язуванні задач статики.
Тому, розглянемо, як направлені реакції деяких основних видів в'язей (табл. 1.1):
Таблиця 1.1 - Основні типи в'язей і напрямки їх реакцій
Тип в'язі |
Схема в'язі та її позначення |
Напрямок реакції вязі |
1 |
2 |
3 |
1. Гладка опорна поверхня |
|
|
2. Опора на гладке ребро тіла або тіло опирається на гладку поверхню
|
|
|
3. Шарнірно-нерухома опора (циліндричний шарнір) |
|
|
4. Шарнірно-рухома опора (каткова опора) |
|
|








Продовження табл. 1.1
1 |
2 |
3 |
5. Гнучка в'язь
|
|
|
6. Жорсткий стрижень
|
|
|
7. Шорстка площина
|
|
|
8. Сферичний шарнір і підп'ятник
|
|
|
9. Защемлення жорстке в площині |
|
|
10. Защемлення жорстке в просторі |
|
|











Продовження табл. 1.1
1 |
2 |
3 |
11. Напівзащемлена опора |
|
|
12. Напівзащемлена опора |
|
|
13. Часткове защемлення |
|
|




В'язь -- це гладка опорна поверхня. Реакція
 такої в'язі направлена вздовж нормалі
до опорної поверхні в цій точці.
такої в'язі направлена вздовж нормалі
до опорної поверхні в цій точці.Коли одна з поверхонь, що дотикаються, є точкою, то реакція направлена по нормалі до другої поверхні.
Нерухомий циліндричний шарнір. Реакція
 лежить
в площині, перпендикулярній до осі
обертання, але напрямок її невідомий.
При розв'язуванні задач цю в'язь замінюють
двома невідомими складовими реакції
лежить
в площині, перпендикулярній до осі
обертання, але напрямок її невідомий.
При розв'язуванні задач цю в'язь замінюють
двома невідомими складовими реакції
 і
і

Шарнірно-рухома опора (каткова опора) дозволяє поворот навколо осі шарніра і переміщення вздовж опорної поверхні. Реакція в'язі перпендикулярна до опорної площини.
Гнучка в'язь (нитка, дріт, ланцюг, канат, мотузка). Реакція цієї в'язі прикладена в точці кріплення і направлена вздовж в'язі до точки підвішування.
Жорсткий стрижень, вагою якого нехтують, а кінці кріпляться з обох боків шарнірне (ідеальний стрижень). Реакція направлена вздовж прямої, яка проходить через центри шарнірів.
В'язь здійснюється по шорсткій поверхні. Напрямок такої в'язі невідомий, тому її розкладають на дві складові: нормальну
 і дотичну
і дотичну
 (сила
тертя), тобто
(сила
тертя), тобто
 .
Модулі
.
Модулі
 і
і
 визначають із відповідних умов рівноваги
тіла.
визначають із відповідних умов рівноваги
тіла.Сферичний шарнір, упорний підшипник, підп'ятник. Про ці види в'язей відомо лише, що реакція проходить через центр в'язі. Розглядаючи рівновагу тіла, реакцію замінюють трьома невідомими складовими
 .
.
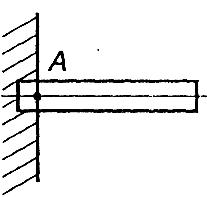
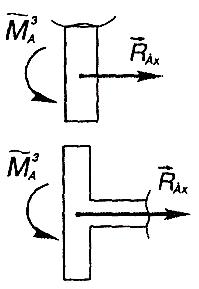
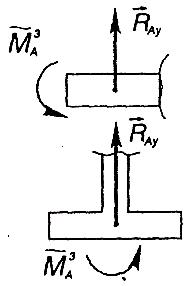
9,10.
Защемлення (жорстке закладання) – це
спосіб закріплення балок в стінах
будинків. Невідомими залишаються напрям
і величина реакції. При розв'язуванні
задач таку в'язь замінюють двома
невідомими складовими реакції
![]() і
реактивною парою сил з моментом Мр
, якщо відомо, що на досліджуване тіло
діє плоска система сил, або трьома
невідомими складовими реакції
і
реактивною парою сил з моментом Мр
, якщо відомо, що на досліджуване тіло
діє плоска система сил, або трьома
невідомими складовими реакції![]() і трьома невідомими складовими реактивного
моменту Мх
,Му
,MZ,
якщо
на тіло діє просторова система сил.
і трьома невідомими складовими реактивного
моменту Мх
,Му
,MZ,
якщо
на тіло діє просторова система сил.
11,12,13. Напівзащемлені опори і часткове защемлення. Реакції направлені в бік, протилежний переміщенню, яке викликає опора.