

Принципы построения сау
Несмотря на все разнообразие САУ по конструкции, существует ограниченное количество способов их построения.
Разомкнутая безрефлексная система.

Uз – заданное значение(задающее воздействие);
U – управляющее воздействие;
f – возмущающее воздействие;
Y – управляемая выходная величина.
ЗУ, руководствуясь сигналами внутри себя (например часами), изменяет Uз через УУ и ИУ. Это изменение передается на объект ОУ, вызывая изменение выходной величины У.
Пример: управление в функции времени пуском электродвигателя.
Достоинства: простота.
Недостатки: точность управления выходной величиной низкая. Под действием возмущения выходная величина У будет отклоняться от заданного состояния, но УУ никак на это не реагирует (безрефлексная система).
Разомкнутая система управления по возмущению (принцип компенсации возмущения Понселе).
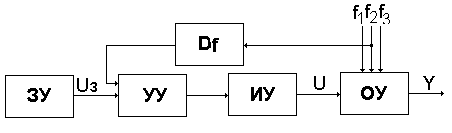
Так как причина отклонения У – возмущение f, то мы измеряем его с помощью датчика Df и в зависимости от величины возмущения формируем такое управляющее воздействие на ОУ, чтобы скомпенсировать влияние возмущения. Характерный признак – наличие двух каналов прохождения сигнала возмущения.
Достоинства: высокое быстродействие.
Недостатки: Для полной и точной компенсации необходимо иметь точную модель объекта по каналу возмущения и управления. Это дорого и с течением времени мат. модель все равно устаревает и становится неточной. Возмущений может быть несколько. Всех измерить сложно и дорого. В результате неточности компенсации основного возмущения и влияния неучтенных возмущений выходная величина будет отклоняться от заданного значения, но УУ об этом не знает.
Замкнутая система управления по отклонению (принцип Ползунова-Уагга).
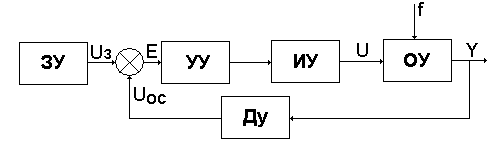
Управляющая величина У измеряется с помощью датчика Ду и сравнивается с заданным значением. Вычисляется ошибка управления =Uз-Uoc. В зависимости от величины и знака ошибки , устройство управления формирует управляющее воздействие на объект, стремясь уменьшить величину ошибки.
(0) если =0, то У=Uз
Характерный признак такой системы наличие отрицательной обратной связи (ООС)(общий вход-выход).
Достоинство: универсальность. УУ реагируетна любые отклонения независимо от причины.
Недостаток: внутреннее противоречие принципа (чтобы уменьшить ошибку, надо ее сначала допустить).
4. Комбинированная САУ (сочетает управление по отклонению с управлением по возмущению).
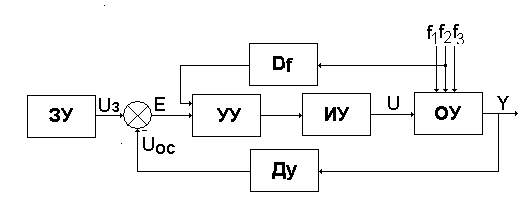
Основное возмущение компенсируется управлением по разомкнутому принципу, а неточность компенсации и влияние неучтенных возмущений устраняется управлением по замкнутому контуру. Здесь самое высокое качество, но самая дорогая структура.
Адаптивная САУ.
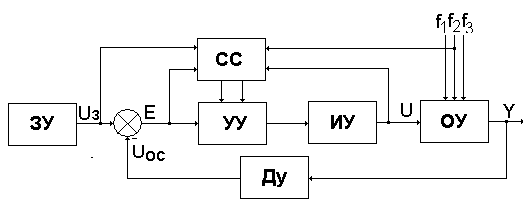
СС – схема самонастройки. Здесь УУ адаптируется с помощью СС в изменяющихся условиях работы.
Классификация сау
По структуре:
Разомкнутые, возможно, работающие по принципу компенсации возмущения.
Замкнутые – управление по отклонению.
Комбинированные.
По сложности структуры:
По количеству цепей ООС:
2.1.1. одноконтурные.
2.1.2. многоконтурные.
По количеству управляемых величин:
одномерные.
многомерные.
По структуре:
каскадные САУ
многоуровневые
иерархические
По целям управления:
Uз = const – система стабилизации.
Uз = var – изменяется по заранее заданной программе (программная САУ).
Uз = var – характер изменения заранее неизвестен (выходная величина будет отслеживать изменение Uз) – следящая САУ.
По виду математического описания:
4.1.1. Линейные
Нелинейные
4.2.
4.2.1. Стационарные САУ (если коэффициенты управления системы постоянны во времени)
4.2.2. Нестационарные САУ (если коэффициенты – функции от времени)
4.3.
4.3.1. Системы с сосредоточенными параметрами (описываются обыкновенными ДУ)
4.3.2. Системы с распределенными параметрами (описываются ДУ в частных производных)
4.4.
4.4.1. Детерминированные системы.
4.4.2. Стохастические системы (если коэффициенты уравнения являются случайными функциями).