

По закону управления
Системы с типовыми линейными и нелинейными регуляторами (П, И, ПИ, ПД, ПИД) (РП, РС).
Оптимальные САУ
Адаптивные (самонастраивающиеся) САУ
Экстремальные
Самообучающиеся, самоорганизующиеся САУ.
По виду действующих в системе сигналов:
Непрерывные (аналоговые)
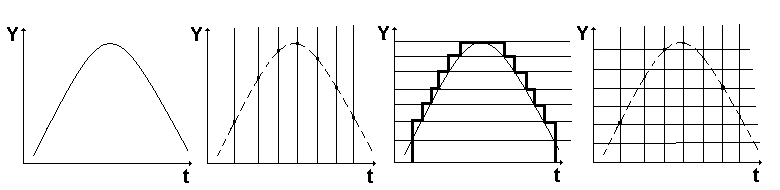
Импульсные (сигнал квантуется по времени)
Дискретные (сигнал квантуется по уровню)
Цифровые САУ (сигнал квантуется и по времени и по уровню)
Смешанные САУ (часть блоков непрерывные, часть - цифровые)
Понятие о звене и его статических характеристиках
Изображение элементов с указанием связи между ними называется структурной схемой. Элемент структурной схемы с выделенным входом и выходом называется звеном. Звенья системы имеют статические и динамические характеристики.
Статической характеристикой называется зависимость выходного сигнала звена от входного в установившемся режиме у=f(x)t.
Если статическая характеристика описывается уравнением прямой линии у=kx+b, то и звено и характеристика называются линейными.
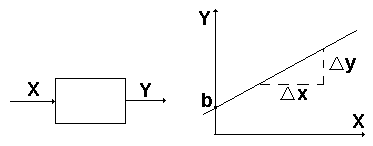
b – константа, зависит от выбора начала отсчета;
k
– коэффициент передачи звена
![]()
Если хотя бы одно звено системы является нелинейным, то и вся система считается нелинейной. Реально все элементы являются в той или иной степени нелинейными, но некоторыми нелинейностями можно пренебречь. Другие обладают гладкими характеристиками и, вводя предположение о малых отклонениях переменных относительно установившегося значения, можно линеаризовать характеристики элементов.
Для непрерывной функции у=f(x), имеющей n непрерывных производных в окрестностях точки линеаризации (у0, х0), степенной ряд Тейлора имеет вид:
![]()
Если отбросить нелинейные члены разложения получим линейное приближение:
![]()
Отсюда следует графический смысл этого метода линеаризации:
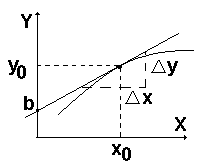
Мы заменяем кривую
отрезком касательной к этой кривой в
рабочей точке:![]()
Результаты линеаризации b и k справедливы только в окрестностях точки линеаризации.
Существуют звенья, у которых не наступает установившийся режим выходной величины. Например: входная величина – приток, выходная – уровень. Двигатель: входная величина – напряжение, выходная – угол поворота.
Если нет установившегося значения выходной величины, то нельзя и построить статическую характеристику. Такие звенья называют астатические.
Типовые входные воздействия
Реальные воздействия на звенья системы носят достаточно сложный характер и часто содержат случайные составляющие. Для сравнительного анализа динамических характеристик звеньев и систем используют типовые входные воздействия. В качестве таковых выбирают или наиболее вероятные или наиболее неблагоприятные воздействия. Наибольшее распространение среди них получили следующие:
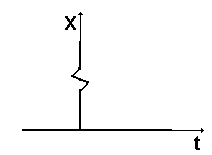
Единичное ступенчатое воздействие.
![]()

Единичное импульсное входное воздействие (-функция)
![]()
С математической точки зрения эта функция представляет собой описание ударов в системе. Она описывает идеальный импульс бесконечно малой длительности и бесконечно большой амплитуды. Площадь импульса равна 1.
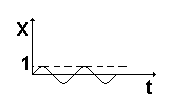
Синусоидальный гармонический сигнал.
![]()
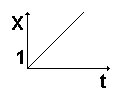
Линейно нарастающий сигнал
![]()
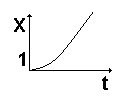
Квадратично нарастающий сигнал.
![]()
Реакция звена или системы на единичное ступенчатое входное воздействие при нулевых начальных условиях называется переходной характеристикой звена h(t).
Реакция на единичное импульсное входное воздействие при нулевых начальных условиях называется импульсной (весовой) характеристикой (t).
Нулевые начальные условия означают , что до момента приложения входного воздействия, система или звено находилось в равновесии и другие воздействия отсутствовали.
При использовании синусоидальных входных воздействий получаем частотные характеристики.