

Автоматизация рекуперативного торможения ( рис. 5 )
Напомним, что суть рекуперативного торможения состоит в следующем: при
каждом переходе двигателя с большей скорости на меньшую, например, с 3-й на
2-ю или со 2-й на 1-ю, двигатель автоматически переходит в режим рекуператив
ного торможения, при котором прежняя ( по инерции ) скорость ротора больше скорости магнитного поля обмотки статора. Двигатель работает в режиме асинхрон
ного генератора, возвращая энергию в сеть. Процесс возвращения накопленной ранее механической энергии в виде электрической в сеть называется рекуперацией.
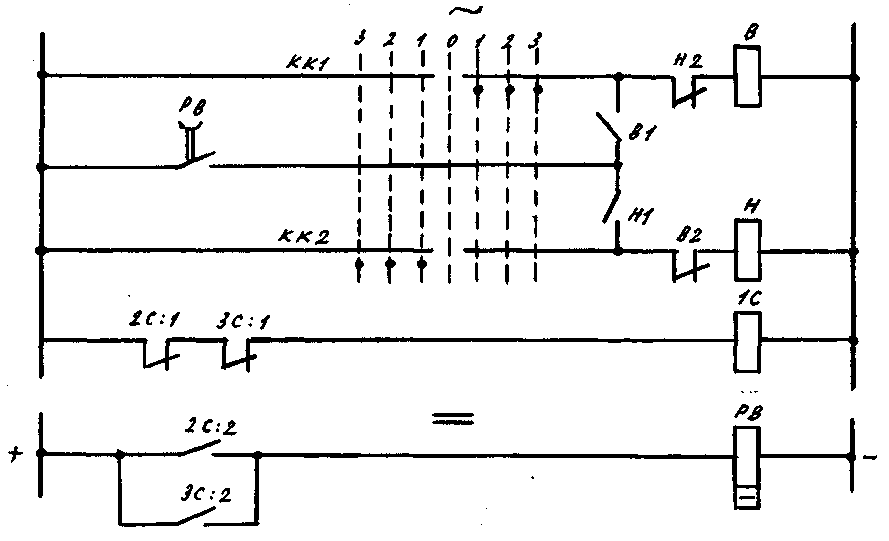
Рис. 5. Автоматизация рекуперативного торможения
Элементы схемы:
В – катушка реверсивного контактора «Вперед»;
Н – катушка реверсивного контактора «Назад»;
1С – катушка контактора 1-й скорости;
РВ – катушка реле времени с демпфером ( реле питается через выпрямительный мостик, который на схеме не показан ).
Подготовка схемы к работе ( исходное состояние ).
При подаче напряжения на схему включается контактор 1-й скорости 1С.
Схема готова к работе.
Работа схемы.
При переводе рукоятки КК в 1-е положение «Вперед» ( «Назад» ) замыкается контакт КК1 ( КК2 ). При этом включается контактор В ( Н ), который замыкает свои главные контакты в силовой части схемы ( не показаны ) и вспомога
тельный В1 в цепи катушки В1. Одновременно размыкается контакт В2 в цепи катушки Н, блокируя его случайное включение ( при одновременном включении двух реверсивных контакторов В и Н происходит двойное металлическое короткое замыкание ).
Поскольку включены контакторы В и 1С, двигатель начинает работать на
1-й скорости.
На 2-й скорости размыкается контакт 2С:1, отключая контактор 1С, и замы
кается контакт 2С:2, включая реле времени РВ2. Реле мгновенно замыкает контакт РВ, вследствие чего через него и ранее замкнувшийся контакт В1 образуется вторая
цепь питания катушки контактора В, параллельная контакту КК1.
На 3-й скорости эта двойная цепь питания катушки В сохраняется, т.к. реле РВ остается включенным через контакт 3С:2 ( контакт 2С:2 разомкнут ).
Рекуперативное торможение происходит так.
При переводе рукоятки КК из 3-го ( или 2-го ) положения в нулевое контак-
ты 2С:1 и 3С:1 замыкаются, включается контактор 1-й скорости 1С. Одновременно
размыкаются контакты 2С:2 и 3С:2, отключая реле времени РВ. Поэтому контакт РВ в цепи катушки В некоторое время остается замкнутым, в результате чего, несмотря на разомкнувшийся контакт КК1, катушка контактора В остается включенной.
Поскольку включены контакторы В и 1С, двигатель подключен к сети и работает на 1-й скорости в режиме рекуперативного торможения ( см. выше ).
Когда же выдержка времени реле РВ истечет, контакт РВ размыкается, ка-
тушка контактора В обесточивается, контактор отключается, тем самым отключая двигатель от сети.
На этом процесс рекуперативного торможения прекращается.
6. Автоматизация динамического торможения ( рис. 6 )
Напомним, что суть рекуперативного торможения состоит в следующем:
для получения этого вида торможения работающий двигатель отключают от сети переменного тока, после чего в обмотку статора подают выпрямленный постоян-
ный ток.
Вращающееся магнитное поле обмотки статора становится неподвижным, как в машинах постоянного тока. Вращающийся по инерции ротор пересекает магнитные силовые линии этого поля, в результате чего в роторе индуктируется ЭДС, под действием которой в роторе возникает ток и электромагнитный тормозной момент.
Двигатель тормозится, и в момент остановки ротора ЭДС в нем исчезает,
т.к. проводники ротора перестают пересекать магнитное поле обмотки статора.
На этом динамическое торможение прекращается.

Рис. 6. Автоматизация динамического торможения
На рис. 6 в силовой части схемы для получения выпрямленного напряжения
использован мостик Гретца.
Поскольку при динамическом торможении в обмотку статора подается постоянный ток, индуктивное сопротивление обмотки исчезает, остается лишь небольшое активное сопротивление ( т.н. омическое ). Чтобы не сжечь обмотку статора, переменное напряжение сети предварительно понижают при помощи трансформатора Т до нескольких десятков вольт.
Элементы схемы:
КМ – контакты линейного контактора ( цепь катушки не показана );
Т – понижающий трансформатор;
UZ1 – выпрямительный мостик для получения постоянного тормозного тока обмотки статора;
UZ2 - выпрямительный мостик для получения постоянного тока для питания реле времени РВ;
РВ – реле времени с демпфером ( выдержка времени – при отключении катушки реле ).
Подготовка схемы к работе ( исходное состояние ).
При подаче переменного напряжения на схему управления ( нижняя часть рис. 6),
питание поступает на выпрямительный мостик UZ2, однако реле РВ не включается, т.к. контакты В:2 ( Н:2 ) разомкнуты.
Схема готова к работе.
Работа схемы.
С началом работы схемы, размыкается контакт В:1( Н:1 ) и замыкается В:2 ( Н:2 ). Реле РВ включается и мгновенно замыкает свой контакт РВ в цепи катушки контактора динамического торможения КДТ. Однако контактор КДТ не включается, т.к. разомкнут контакт В:1 ( Н:1). Замкнуты контакты КМ, двигатель включен в сеть переменного тока.
При остановке двигателя контакторы КМ и В ( Н ) отключаются, замыкается контакт В:1 ( Н:1 ) и размыкается контакт В:2 ( Н:2 ), последний отключает реле РВ.
Через замкнувшийся контакт В:1 ( Н:1 ) включается контактор динамиче
ского торможения КДТ, через замыкающиеся контакты которого в обмотку статора подается постоянный ток.
Когда выдержка времени реле РВ закончится, контакт РВ в цепи катушки КДТ размыкается, обмотка статора отключается от выпрямителя UZ1 ( UZ2 ).
На этом динамическое торможение прекращается.
Приложение 9.
Бесконтактные схемы электроприводов на тиристорах