

Глобальная Интерполяция Кривых
Простейший способ получения кривой B-spline, проходящей по исходным точкам, - это метод глобальной интерполяции. Почему интерполяция "глобальная", станет ясно позже на этой странице.
Пусть есть n+1 исходных точек d0, d1, ..., dn и нужно по ним провести кривую B-spline степени p, где p <= n - это входные данные. С помощью метода, обсужденного в Выборе Параметров и Получении Узлового Вектора, можно выбрать набор значений параметров t0, t1, ..., tn. Заметьте, что количество параметров равно количеству исходных точек, потому что параметр tk соответствует исходной точке dk. Из этих параметров вычисляется узловой вектор из m + 1 узлов, где m = n + p + 1. Таким образом, у нас есть узловой вектор и степень, и единственная недостающая деталь - это набор из n+1 контр. точек! Глобальная интерполяция - это простой способ нахождения этих контр. точек.
Нахождение Решения
Пусть желаемая интерполированная кривая B-spline степени p следующая:

Эта кривая B-spline имеет n + 1 неизвестных контр. точек. Так как параметр tk соответствует исходной точке dk, то, подставляя tk в вышеуказанное уравнение, получим следующее:

Так как в вышеуказанном уравнении n + 1 базисных функций B-spline (т.e. N0,p(u), N1,p(u), N2,p(u), ... и Nn,p(u), и n + 1 параметр (т.e. t0, t1, t2, ... и tn), то , подставив эти tk в Ni,p(u) получим (n+1)2 значений. Эти значения можно записать в виде матрицы N размера (n+1)×(n+1), в которой k-й ряд содержит значения N0,p(u), N1,p(u), N2,p(u), ... и Ni,p(u) для tk, как показано ниже:
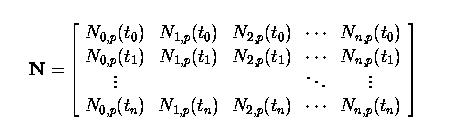
Давайте также соберем векторы dk и pi в дае матрицы D и P следующим образом:

Здесь будем считать, что исходная точка dk является вектором в s-мерном пространстве (т.e. dk = [ dk1, ... , dks]) и стоит в k-м ряду матрицы D. Аналогично, считаем pi вектором в s-мерном пространстве (т.e. pi = [ pi1, ... , pis]) и что она находится в i-м ряду матрицы P. Заметьте, что в трехмерном пространстве s = 3, а на плоскости s = 2. Также заметьте, что матрицы D и P - обе размера (n+1)×s. Затем, нетрудно проверить, что соотношение между значениями dk и ti преобразуется к такому более простому виду:
![]()
Так как матрица D содержит исходные точки и матрица N получены вычислением базисных функций B-spline по данным параметрам, то D и N - обе известны, а неизвестно только P. Так как это просто система линейных уравнений с неизвестным P, то, решая относительно P, получим контр. точки и желаемая интерполированная кривая B-spline станет доступной. Таким образом, задача интерполяции кривой решена!
Алгоритм
Матрицы D и P - не являются матрицами-столбцами, но это не большая проблема. Можно решать систему по столбцам. Говоря точнее, пусть i-й столбец D и i-й столбец P будут di и pi, соответственно. Из вышеуказанной системы линейных уравнений, получаем следующее:
![]()
Затем, решая относит. pi из N и di даст i-й столбец P. Проделываем это для каждого i в пределах от 0 до h, и получим в итоге P. Таким образом, все контр. точки найдены. Как вы, наверное, заметили, это очень неэффективно. К счастью, многие вычислительные библиотеки имеют процедуры решения систем линейных уравнений, которые подходят для эффективного решения уравнения D = N.P. Получается, провести кривую B-spline по n+1 точкам не так уж сложно. Оно сводится к решению системы линейных уравнений. Следующий алгоритм объединяет все сказанное:
Вход: n+1 исходных точек d0, ..... dn и степень p Выход: Кривая B-spline степени p, содержащая все эти исходные точки в данном порядке. Алгоритм:
Выбираем метод для нахождения набора из n+1 параметров t0, ..., tn; Заодно получим и узловой вектор U; for i := 0 to n do
for j := 0 to n do
Вычисляем [Evaluate] Nj,p(ti) и ставим в ряд i и столбец j матрицы N;
/* матрица N найдена */ for i := 0 to n do
Помещаем исходную точку di в ряд i матрицы D;
/* матрица D построена */ Решаем систему уравнений и находим P из D = N.P Ряд i матрицы P - это контр. точка pi; Контр. точки p0, ..., pn, узловой вектор U и степень p определяют интерполированную кривую B-spline;
Ниже, на рисунке (а), показан пример. Здесь 9 исходных точек, показаны черным. Найденные контр. точки показаны синим. Маленькие красные точки на интерполированной кривой - это точки, соответствующие узлам, вычисленным по методу длины хорды. В этом случае, эти "узловые точки" находятся довольно близко к исходным точкам и контр. ломаная также проходит близко к исходной, хоть и не всегда. Например, на рисунке (b), исходная и контрольная ломаные очень отличаются.
|
|
(a) |
(b) |


Важно отметить, что матрица N целиком положительна и окружена полосой с половиной ширины меньше [banded with a semi-bandwidth less than] p (т.e. Ni,p(tk) = 0, если |i - k| >= p), если узлы вычисляются по среднему значению от p последовательных параметров. Это было доказано de Boor в 1978 г. Подробности в Получении Узлового Вектора. Это значит, что система линейных уравнений, полученная по вышеизложенному алгоритму, может быть решена методом исключения Гаусса без вращения [центрирования ? pivoting].