

Розділ іі. Експериментальна частина. Дослідження фізичних властивостей напівізолюючих монокристалів СdTe:Cl
2.1. Технологія вирощування кристалів
В основу загальної класифікації методів вирощування монокристалів напівпровідникових сполук поставлена природа та склад основної речовини. На цій основі можна виділити наступні методи вирощування монокристалів СdTe:
Ріст із розплавів чистих речовин і розплавів, що леговані домішками.
Ріст із розчинів речовини, що кристалізується в чистому розчиннику, що має домішку.
Ріст із парової фази, коли вона складається з атомів, або молекул елементів, що утворюють кристал, і одночасно складається з різних хімічних сполук атомів, котрі утворюють кристал.
Найбільш простим і поширеним методом вирощування монокристалів CdTe з розплаву, близького до стехіометричного складу, є метод Бріджмена. Процес направленої кристалізації сполуки СdТе по методу Бріджмена виконують наступним чином. Синтезований і додатково очищений методом вакуумної сублімації і (або) вертикальної зонною плавкою СdТе завантажують в графітизовані кварцові ампули, вакуумують, промивають воднем і після цього відпаюють. Потім ампулу з наважкою поміщають в верхню частину електропечі і підвищують її температуру до 1393º - 1423º К. При цій температурі розплав витримують на протязі декількох годин для гомогенізації, потім ампулу з розплавом опускають зі швидкістю 3-5 мм/год через градієнт температури в нижню область печі, температура якої складає1273º - 1300º К. В деяких випадках кристалізацію виконують з більшою швидкістю (10-20 мм/год). Градієнт температури в області фронту кристалізації складає 10-15 К/см. Кристалізація розплаву проходить від дна ампули вверх. Після закінчення кристалізації зливку піч охолоджують зі швидкістю 50 К/год до температури 773º - 800º К, а потім неконтрольовано в режимі виключеного живлення печі. Таким чином можна отримати достатньо великі монокристалічні зливки СdТе діаметром до 75 мм і вагою до 1,5 кг.
Основною вимогою для ефективного вирощування кристалів методом Бріджмена і Бріджмена-Стокбаргера є високоточна стабілізація температури відділів печі. Раніше для цього використовувались блоки ВРТ. Зрозуміло, сьогодні ця система вже не відповідає як технічним вимогам, так і енергетичним. Тому нами було розроблено електронний блок регулювання температури на основі алгоритму пропорційно-інтегрально-диференційного регулювання (ПІД регулювання). Нижче буде розглянуто структуру та принцип роботи даного пристрою.
Апаратне забезпечення. Електрична схема регулятора наведена на Рис71-9. На Рис.7 зображено схему основного обчислювального блоку, ядром якого є мікроконтролер AT90USB1286 (U3). Він на основі значень температури, отриманих з термопар та заданих значень температури розраховує струм пічки та виводить поточне значення температури у обох відділах на дисплей. Тактується контролер від зовнішнього кварцового резонатора Q1.
U1 та U2 – 16-розрядні аналого-цифрові перетворювачі ADS1110, які здійснюють оцифровку сигналів з термопар. Дані АЦП містять джерело опорної напруги (2.048 В) та двопровідний інтерфейс TWI, що сприяє їх зручному використанню.
Для індикації під час роботи використовується 24-символьний (2 рядки по 12 символів) рідкокристалічний дисплей WH1202 на базі контролера HD44780. Він під’єднаний до порту А мікроконтролера через роз’єм J2.
Управління терморегулятором здійснюється 3-ма кнопками, які через роз’єм J3 підключені до порту С.
Транзистор Q1 та бузер BUZ1 утворюють
звукову сигнальну систему. У випадку
неполадок у приладі (обрив термопари,
обрив у силовому блоці) та при завершенні
поточного завдання з виходу таймера
TC2 на базу Q1 подається прямокутний
імпульсний сигнал з звуковою частотою
 1 кГц.
1 кГц.
рис.
7. Принципова електрична схема регулятора
температури (блок обробки)
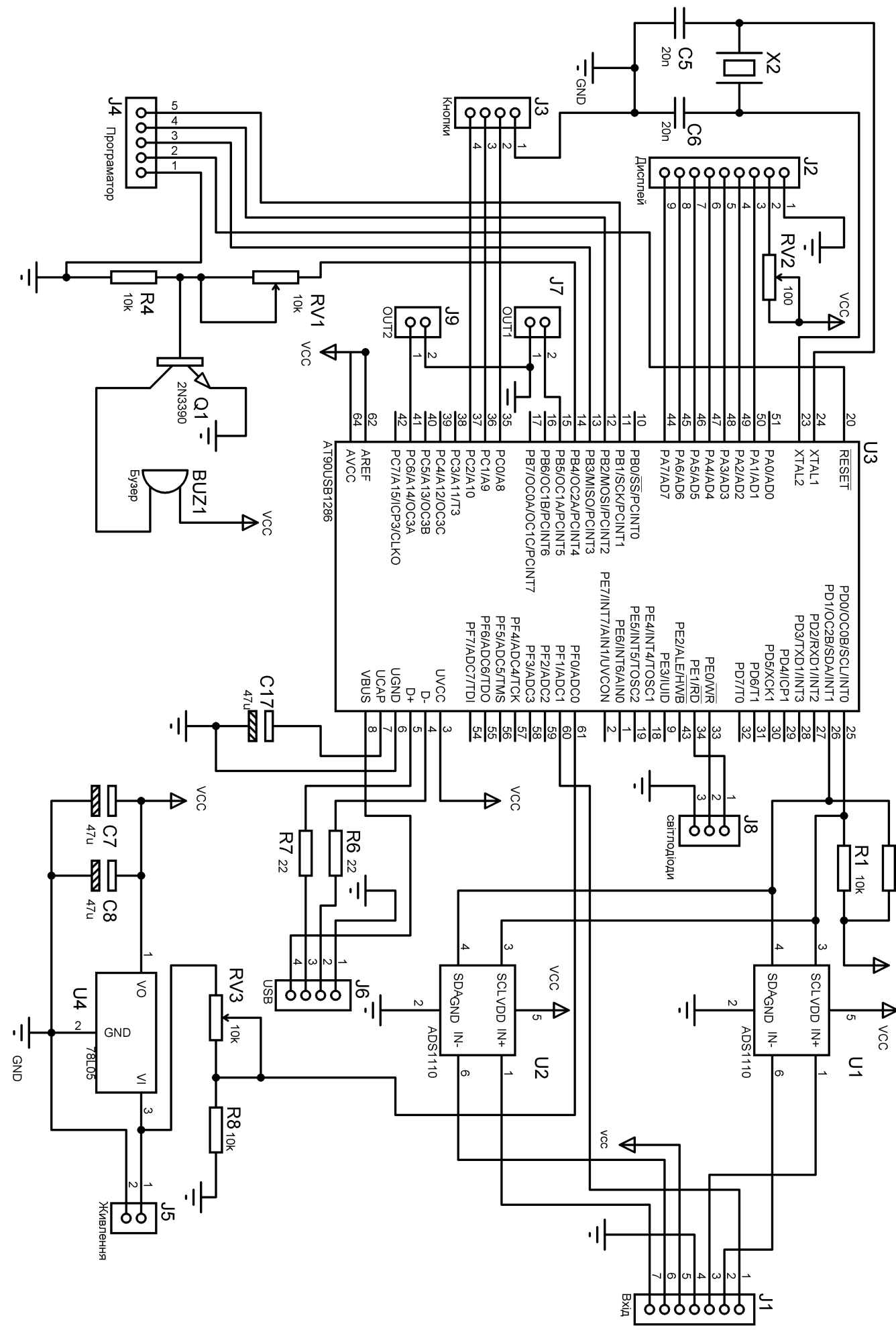
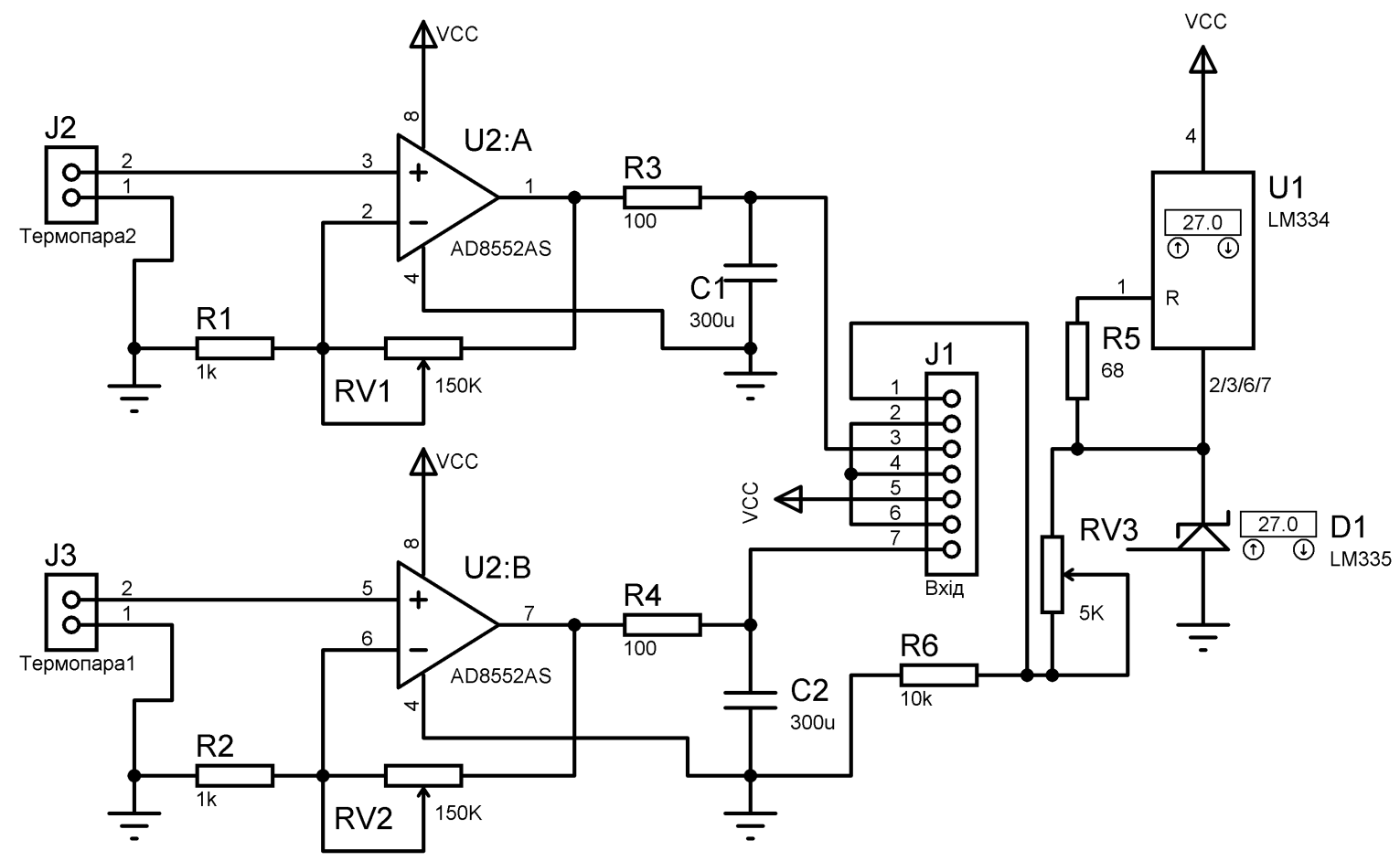
Рис. 8. Принципова електрична схема регулятора температури (блок попереднього підсилення сигналу з термопари)
|
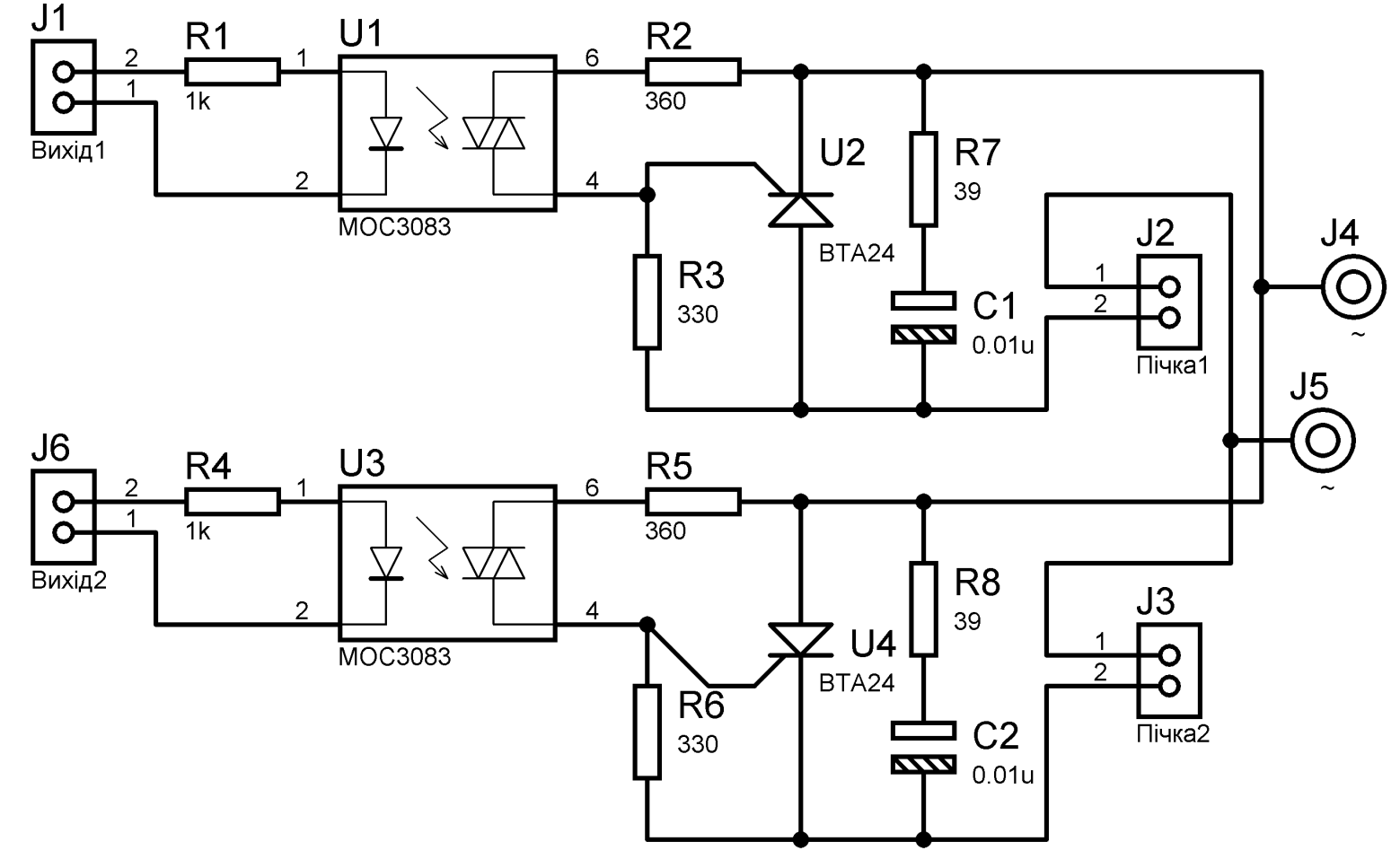
Рис. 9. Принципова електрична схема регулятора температури (силовий блок) |
Уся система живиться від джерела постійного струму з напругою 5-9 В. Для стабілізації напруги живлення використовується інтегральний стабілізатор 78L05 (U4). Передбачено, що задля захисту від перебоїв живлення система може бути підключена до акумуляторного джерела, контроль заряду якого здійснюється через 1-й канал аналого-цифрового перетворювача контролера (ADC0).
На Рис. 8 зображено блок попереднього підсилення сигналу термопари. Кожна з термопар через роз’єми J2 та J3 та резистори підключаються до входів операційного підсилювача ADC8552, який працює як двоканальний неінвертуючий підсилювач. Необхідний коефіцієнт підсилення визначаємо з співвідношення:
 ,
(2.1).
,
(2.1).
де
 – опорна напруга АЦП,
– опорна напруга АЦП,
 – максимальне значення термо-ЕРС
термопари.
– максимальне значення термо-ЕРС
термопари.
Коефіцієнт підсилення для схеми на основі ОП U2:A визначається за формулою:
 (2.2).
(2.2).
Вибираємо резистор
 рівний 1 кОм. Тоді RV1 повинен бути рівний
120 кОм. Задля точної підстройки при
налаштуванні було використано змінний
резистор на 150 кОм. Аналогічно для другого
каналу
рівний 1 кОм. Тоді RV1 повинен бути рівний
120 кОм. Задля точної підстройки при
налаштуванні було використано змінний
резистор на 150 кОм. Аналогічно для другого
каналу
 = 1 кОм,
= 1 кОм,
 = 150 кОм.
= 150 кОм.
Резистор
 та конденсатор
та конденсатор
 (відповідно
(відповідно
 і
для другого каналу) утворюють фільтр
нижніх частот. Призначення цього фільтру
– відсіяти усі сигнали перешкод, які
індукуються у термопарі та провідниках.
Гранична частота такого фільтра становить
5 Гц. Задля мінімального послаблення
корисного сигналу на виході підсилювача
резистор
(
)
вибраний на 100 Ом. Відповідно з ємність
конденсатора
(
і
для другого каналу) утворюють фільтр
нижніх частот. Призначення цього фільтру
– відсіяти усі сигнали перешкод, які
індукуються у термопарі та провідниках.
Гранична частота такого фільтра становить
5 Гц. Задля мінімального послаблення
корисного сигналу на виході підсилювача
резистор
(
)
вибраний на 100 Ом. Відповідно з ємність
конденсатора
( )
визначаємо з співвідношення:
)
визначаємо з співвідношення:
 (2.3).
(2.3).
При юстуванні приладу коефіцієнти підсилення кожного каналу можна підстроїти за допомогою перемінних резисторів RV1 та RV2.
Для вимірювання температури холодного
спаю термопари використовується
термодатчик LM335 (D1), який являє собою
стабілітрон з номінальним температурним
коефіцієнтом напруги
 .
Сигнал з цього датчика подається на 2-й
канал АЦП мікроконтролера, де оцифровується.
Для правильних показів LM335 необхідна
стабілізація струму, яка здійснюється
за допомогою джерела струму LM334 (U1).
.
Сигнал з цього датчика подається на 2-й
канал АЦП мікроконтролера, де оцифровується.
Для правильних показів LM335 необхідна
стабілізація струму, яка здійснюється
за допомогою джерела струму LM334 (U1).
Опір резистора
 взято з документації на датчик LM334.
Резистори
взято з документації на датчик LM334.
Резистори
 та
та
 формують дільник напруги, який запобігає
виходу значень напруги, яку видає датчик
температури, за допустимі межі для АЦП
мікроконтролера. Зміною опору резистора
відбувається юстування датчика.
формують дільник напруги, який запобігає
виходу значень напруги, яку видає датчик
температури, за допустимі межі для АЦП
мікроконтролера. Зміною опору резистора
відбувається юстування датчика.
На Рис. 9 зображена принципова електрична схема силового блоку, призначеного для комутації спіралей пічки. Даний блок побудований на основі оптосимісторів MOC3083, які призначені для гальванічної розв’язки цифрового блоку та струмового, та симісторів BTA24 (U2 та U4), які комутують струм до 25А.
Керування силовим блоком здійснюється широтно-імпульсно модульованими (ШІМ) сигналами, які генеруються таймерами ТС1 та ТС3 мікроконтролера. Логічна одиниця з МК (>4В) відкриває оптосимістор, який у свою чергу відкриває потужні симістори, які підключені до нього. Вихідна потужність, яка комутується, прямо пропорційна коефіцієнту заповнення ШІМ сигналу.
Резистори R1 та R4 призначені для встановлення робочого струму через світлодіод оптосимістора і їх номінали визначаються за співвідношенням:
 (2.4)
(2.4)
Тут
 – напруга логічної одиниці ШІМ сигналу;
відповідно рівна напрузі живлення МК,
тобто 5В.
– напруга логічної одиниці ШІМ сигналу;
відповідно рівна напрузі живлення МК,
тобто 5В.
 номінальний струм через світлодіод
оптосимістора. З документації на MOC3083
номінальний струм через світлодіод
оптосимістора. З документації на MOC3083
 .
.
Елементи R7 і C1 та R8 і C2 утворюють так звані стробуючі кола, призначені для запобігання самовідкривання симісторів при відсутності сигналу на керуючому електроді. Їх номінали, як і номінали резисторів R2 і R3 та R5 і R6, які призначені для стабілізації роботи симісторів, взяті із рекомендацій у документації на симістори.
Принцип роботи даної системи наступний. Сигнал з термопари поступає на вхід попереднього підсилювача, де підсилюється до значення, співрозмірного з чутливістю АЦП. З виходу ОП підсилений сигнал проходить через фільтр нижніх частот і подається на вхід аналого-цифрового перетворювача. Останній оцифровує значення цього сигналу і передає результат через порт TWI на мікроконтролер. Враховуючи значення виміряної температури холодного спаю та значення температури, отримане з термопари, мікроконтролер визначає реальне значення температури у пічці та розраховує на основі цього струм, який необхідно встановити. Результат розрахунку – число від 0 до 100 з дискретністю 0.1, яке виражає відсоткову потужність пічки по відношенню до максимальної, яка досягається при ввімкненні без керуючого кола. На основі результату цього розрахунку встановлюється коефіцієнт заповнення ШІМ сигналу. Як згадувалось вище, керування потужністю пічки здійснюється за допомогою 16-розрядних таймерів, які працюють у режимі ШІМ генераторів. Дані таймери неперервно генерують сигнал частотою 5 Гц з заданим коефіцієнтом заповнення. Цей сигнал з виходів 15 (ОС1А) і 41 (ОС3А) передається через роз’єми J7 (на керуючій платі) – J1 (на платі силового блоку) та J9-J3 на входи силового блоку, а точніше оптосимісторів. Як уже згадувалось, дані оптосимістори виконують роль гальванічної розв’язки між цифровим блоком управління та потужним силовим блоком керування навантаженням. При високому рівні на вході оптосимістор замикає вихідні контакти, подаючи сигнал на керуючий електрод симістора. Симістор відкривається і пропускає струм через спіраль пічки. Таким чином змінюючи коефіцієнт заповнення ШІМ (він визначається як відношення часу на протязі якого був присутній високий рівень сигналу, до повного періоду імпульсу) можна лінійно змінювати споживану потужність пічки.
Теорія ПІД регулювання. ПІД регулятор був винайдений ще у 1910 році, але лише після появи мікропроцесорів у 1980-х роках його розвиток набув бурхливих темпів. Даний тип регулювання відноситься до найпоширеніших у світі. Так, порядку 90-95% регуляторів, які знаходяться у даний час в експлуатації, використовують ПІД алгоритм. Причинами цього є простота побудови і промислового використання, ясність функціонування, придатність для вирішення більшості практичних задач і низька вартість.
Н айпростіша
система автоматичного регулювання з
зворотнім зв’язком показана на ри
с.4. У ній блок R називають регулятором,
Р - об ’єкт регулювання, r –
управляюча дія або уставка, е -
сигнал неузгодженості або помилки, u
– вихідна величина регулятора, у –
регульована величина.
айпростіша
система автоматичного регулювання з
зворотнім зв’язком показана на ри
с.4. У ній блок R називають регулятором,
Р - об ’єкт регулювання, r –
управляюча дія або уставка, е -
сигнал неузгодженості або помилки, u
– вихідна величина регулятора, у –
регульована величина.
рис.
10. Найпростіша система автоматичного
регулювання з зворотнім зв’язком
 (2.5),
(2.5),
то регулятор називається пропорційним.
Лінійна ділянка статичної характеристики
не безкінечна і обмежена максимальним
значенням вихідної величини
 .
.
Якщо вихідна змінна регулятора описується виразом:
 (2.6),
(2.6),
де
 – час,
– час,
 ,
,
 ,
,
 – відповідно пропорційний коефіцієнт,
постійна інтегрування та постійна
диференціювання, то такий регулятор
називають пропорційно-інрегрально-диференційним
регулятором. Якщо один з доданків
відсутній, то регулятор автоматично
може бути перетворений у пропорційний,
пропорційно-інтегральний чи
пропорційно-диференційний.
– відповідно пропорційний коефіцієнт,
постійна інтегрування та постійна
диференціювання, то такий регулятор
називають пропорційно-інрегрально-диференційним
регулятором. Якщо один з доданків
відсутній, то регулятор автоматично
може бути перетворений у пропорційний,
пропорційно-інтегральний чи
пропорційно-диференційний.