

Раздел 7. Выделение в когерентно – импульсных рлс полезного сигнала фазовыми детекторами
Детектирование фаз-мод. сигналов сводится к преобразованию их в АФМ и последующему их детектированию при помощи амплитудного детектора. Отсчет фазы ведется относительно опорного напряжения Uвх2
Принцип действия однотактного фазового детектора (рис.7.1,а).
На первый вход фазового детектора подается напряжение
U1 = Um1 cos (ωt + φ1),
на второй вход
U2 = Um2 cos (ωt + φ2).
Диод Д, конденсатор С и резистор R образуют схему последовательного амплитудного детектора. В зависимости от разности фаз ∆φ между напряжениями U1 и U2 напряжение, прикладываемое к диоду Uд, будет изменяться и выходное напряжение детектора U0 будет также изменяться (рис.7.1б).


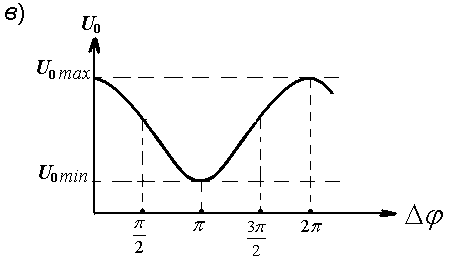
Рис.7.1 Однотактный фазовый детектор: а - принципиальная схема;
б – векторные диаграммы; в – детекторная характеристика
При нулевом фазовом сдвиге результирующее напряжение, прикладываемое к диоду, будет максимальным, поэтому и U0 также будет максимальным. Выходное напряжение детектора определяется как произведение коэффициента передачи детектора Kд на величину результирующего напряжения Uд: U0 = К д Uд.
На рис.7.1,в представлена зависимость выходного напряжения U0 от разности фаз входных напряжений ∆φ (детекторная характеристика).
Как видно, напряжение на выходе имеет всегда положительную полярность и максимальную крутизну при фазовом сдвиге ∆φ = π/2.
(Однотактная схема имеет нелинейную детекторную характеристику. Она не может быть использована в системах автоподстройки т.к. управляющее напряжение таких систем должно изменять свою полярность в зависимости от знака фазового сдвига).
Наибольшее применение получил балансный двухтактный детектор (рис.7.2).

Рис.7. 2. Принципиальная схема балансного фазового детектора
На
выходах двух амплитудных детектора
получается разностное напряжение,
определяемое величинами токов диодов.
Опорное напряжение подается между
средней точкой катушки связи Lсв
и точкой соединения С1
и С2.
Выходное напряжение равно разности
напряжений в нагрузках
![]() и
и
![]() детекторов:
детекторов:
![]() .
(7.3)
.
(7.3)
С учетом того, что
![]() и
и
![]() ,
,
получим
U0 = Кд (Uд1 - Uд2).
По векторным диаграммам напряжений в схеме рис.7.1,б видно, что при фазовом сдвиге ∆φ = π/2 к диодам Д1 и Д2 прикладываются одинаковые напряжения Uд1 = Uд2, поэтому выходное напряжение U0 равно нулю.
При сдвиге фаз ∆φ< π/2 к диоду Д1 прикладывается большее по величине напряжение.
«Слепые» зоны дальности (Особенность когерентно-импульсных приемников, вызванная спецификой работы фазового детектора).
В дальномерных РЛС существует понятие «слепые» зоны дальности. Если объект находится в этих зонах, сигнал от него не принимается.
Например, в РЛС с корреляционной обработкой сигналов, имеющих большую базу, тогда дальность до объекта определяется по принятому коду, при этом из-за наличия «слепых» зон при передвижении цели сигнал от него будет пропадать. При этом с определенных дальностей сигнал от движущейся цели будет восприниматься как сигнал от неподвижного объекта.
Такие дальности в РЛ называют «слепыми».