

Раздел 8. Взаимодействие сигнала и шума на выходе приемника
Сигнал
шума
![]() на выходе приемника
на выходе приемника
![]() (8.1)
(8.1)
![]() ;
и
;
и
![]() -
случайные величины по времени;
-
случайные величины по времени;
![]() - резонанс. частота
- резонанс. частота

Рис.8.1.Шумовое колебание на выходе приемника
Выражение (8.1) – в виде суммы ортогональных составляющих
![]()
где
:
![]() и
и
![]() -
случайные и независимые
-
случайные и независимые
Закон распределения ортогональных составляющих
![]() и
и
![]() - подчиняются распределению Гаусса
- подчиняются распределению Гаусса
![]()
![]() (8.2)
(8.2)
где
![]() - дисперсия шума
- дисперсия шума
Средние
значения
![]()
При
появлении полезного сигнала
![]() на выходе линейной части приемника
имеем аддитивную смесь напряжений
сигнала и шума
на выходе линейной части приемника
имеем аддитивную смесь напряжений
сигнала и шума
![]() (8.3)
(8.3)
где:
1)
![]() - случайная величина с распределением
по нормальному закону
- случайная величина с распределением
по нормальному закону

2)
![]()
В этом случае средние значения
![]() ;
и
;
и
![]()

Рис.8.2. Составляющие напряжений шума а) и сигнала с шумом б).
Результирующее
напряжение
![]() можно также представить
можно также представить
![]()
![]() (8.4)
(8.4)
где
![]()
![]() .
.
Найдем
закон распределения огибающей
результирующего сигнала
![]() и
и
![]() - независимых величин, у которых двумерная
плотность распределения
- независимых величин, у которых двумерная
плотность распределения
 (8.5)
(8.5)
После ряда преобразований (8.5) плотность распределения вероятностей огибающая сигнала с шумом будет в виде обобщенного закона Релея, представляющего собой
 (8.6)
(8.6)
где
![]() - функция Бесселя нулевого порядка
- функция Бесселя нулевого порядка
![]() .
.
При
![]() имеем
имеем
![]() .
.
Тогда
![]() - это релеевское распределение.
- это релеевское распределение.
В
другом частном случае, когда
![]() ,тогда
,тогда
![]() .
.
Поэтому
 - т.е. является нормальным законом
распределения.
- т.е. является нормальным законом
распределения.
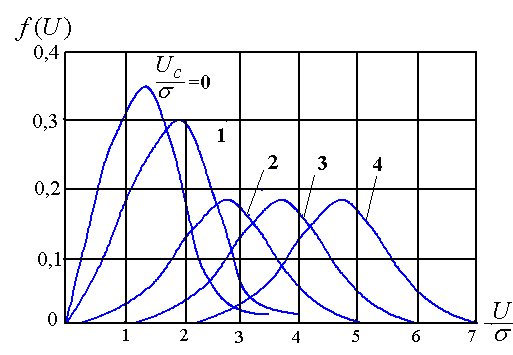
Рис.8.3. Плотность распределения огибающей сигнала с шумом

Рис.8.4. Плотность распределения фазы сигнала с шумом
Плотность
распределения фазы
![]() сигнала с шумом
сигнала с шумом

где
 - функция Лапласа
- функция Лапласа
Когда
,
![]() - т.е имеет место равномерное распределение
фазы.
- т.е имеет место равномерное распределение
фазы.
Когда
![]() ,
тогда
,
тогда
-
т.е является нормальным законом
распределения с дисперсией
![]() .
.
Когда
![]()
![]() - стремиться к
- стремиться к
![]() -
функции.
-
функции.
Раздел 9. Спектральный анализ сигналов, отраженных от движущихся целей и мешающих объектов
Способ спектрального различия сигналов, отраженных от движущихся целей и мешающих объектов обеспечивается селекция полезных сигналов на фоне помех. Рассмотрим спектры принимаемых сигналов на входе и выходе фазового детектора когерентно-импульсного приемника.
Цель, движущаяся равномерно в радиальном направлении и неподвижный мешающий объект, облучаются радиоимпульсами прямоугольной формы, длительностью τ, несущей частотой ω0, следующие с постоянным периодом повторения Тп. (полагаем - РЛС неподвижна).

Рис.9.1. Сигналы, отраженные от неподвижного объекта,
на входе и выходе фазового детектора:
а - сигналы на входе фазового детектора;
б - сигналы на выходе фазового детектора
Сигнал, отраженный от неподвижного мешающего объекта, представляет собой периодическую последовательность одинаковых по амплитуде прямоугольных радиоимпульсов up(t) на входе (рис.9.1,а) и видеоимпульсов uв (t) на выходе (рис.9.1,б) фазового детектора. Последовательность видеоимпульсов описывается рядом Фурье
![]() (8.1)
(8.1)
где:
![]()
а
коэффициент ряда
 ,
,

Применительно к импульсам прямоугольной формы
![]()
![]() где
где
![]()
Последовательность
радиоимпульсов на входе фазового
детектора
![]() ,
,
что после преобразований может быть записано в виде ряда
![]() (8.2)
(8.2)

Рис.9.2.Спектры периодических последовательностей
радио- и видеоимпульсов от неподвижных объектов:
а — спектр последовательности радиоимпульсов;
б — спектр последовательности видеоимпульсов
На рис.9.2 изображены спектры сигналов, отраженных от неподвижных объектов, на входе (рис.9.2,а) и выходе (рис.9.2,б) фазового детектора в соответствии с выражениями (9.1) и (9.2).