

За результатами синтезу послідовного коректуючого пристрою (задача 4) розрахувати перехідну функцію скоректованої замкнутої сау й побудувати її графік (зворотний зв’язок вважати одиничним від’ємним):
розрахувати фазову частотну характеристику скоректованої системи;
за допомогою номограм замикання побудувати дійсну частотну характеристику замкненої САУ Р(ω);
розрахувати перехідну функцію замкнутої системи за методом трапецій;
визначити основні показники якості перехідного процесу: час регулювання tp, перерегулювання σ, час першого узгодження tп.у, час досягнення першого максимуму tmax;
виконати моделювання системи за допомогою пакету “Matlab” і порівняти результати з отриманими за методом трапецій.
Література: [1, стор. 218-225]; [3, стор. 321-340].
Приклад 5
Передаточна функція скоректованої САУ має вид:
![]() (5.1)
(5.1)
Фазову частотну характеристику можна розрахувати за ланками (приклад 3), або за допомогою формули:
![]() (5.2)
(5.2)
Логарифмічні частотні характеристики системи наведені на мал. 5.1.
За
допомогою номограм замикання розрахуємо
дійсну частотну характеристику
![]() .
Результати розрахунків зведено до
таблиці 5.1. Характеристика наведена на
мал. 5.2.
.
Результати розрахунків зведено до
таблиці 5.1. Характеристика наведена на
мал. 5.2.
Таблиця 5.1.
Розрахунок
![]() скоректованої
системи.
скоректованої
системи.
|
0 |
1 |
5 |
10 |
20 |
50 |
100 |
200 |
L, дб |
|
36 |
10 |
5 |
0 |
-7 |
-18 |
-36 |
|
-90 |
-129 |
-127 |
-121 |
-127 |
-158 |
-195 |
-227 |
|
1 |
1 |
1,13 |
0,93 |
0,5 |
-0,7 |
-0,2 |
0 |
Розподіляємо
на
чотири трапеції, для кожної з котрих
визначаємо: частоту спряження
![]() ,
частоту зрізу
,
частоту зрізу
![]() ,
висоту Hi
обчислюємо коефіцієнт нахилу:
,
висоту Hi
обчислюємо коефіцієнт нахилу:
![]() (5.3)
(5.3)
-
трапеція І:
![]() ;
;
трапеція ІІ:
 ;
;трапеція ІІІ:
 ;
;трапеція ІV:
 .
.
За допомогою таблиць h – функцій для кожної трапеції заповнюємо таблицю розрахунку перехідної функції hi (t) (табл.5.2.), при цьому справжній час tспр та значення перехідної функції hi(t) визначаються за допомогою співвідношень:
![]() ;
; ![]() (5.4)
(5.4)
де
![]() і
і
![]() знаходяться за таблицями
знаходяться за таблицями
![]() - функцій для відповідного коефіцієнта
нахилу.
- функцій для відповідного коефіцієнта
нахилу.
Будуємо перехідну характеристику для кожної трапеції і перехідну характеристику всієї системи як геометричну суму hi(t) (мал. 5.3).
Таблиця 5.2
Трапеція І |
|||||||||
|
0 |
4,5 |
9,0 |
11,0 |
13,5 |
18,0 |
20,0 |
2,0 |
3,0 |
|
0 |
1,115 |
0,992 |
0,993 |
0,984 |
1,008 |
1,004 |
0,786 |
1,013 |
|
0 |
0,9 |
1,8 |
2,2 |
2,7 |
3,6 |
4,0 |
0,4 |
0,6 |
|
0 |
-0,145 |
-0,129 |
-0,129 |
-0,128 |
-0,131 |
-0,13 |
-0,1 |
-0,132 |
Продовження таблиці 5.2.
Трапеція ІІ |
|||||||||
|
0 |
5,0 |
11,5 |
14,0 |
17,0 |
21,0 |
|
|
|
|
0 |
0,978 |
1,016 |
1,011 |
1,016 |
1,011 |
|
|
|
|
0 |
0,1 |
0,23 |
0,28 |
0,34 |
0,42 |
|
|
|
|
0 |
1,79 |
1,86 |
1,85 |
1,86 |
1,85 |
|
|
|
Трапеція ІІІ |
|||||||||
|
0 |
4,0 |
8,0 |
12,0 |
16,0 |
20,0 |
|
|
|
|
0 |
1,158 |
0,941 |
1,019 |
1,0 |
0,992 |
|
|
|
|
0 |
0,024 |
0,048 |
0,07 |
0,09 |
0,12 |
|
|
|
|
0 |
-0,232 |
-0,188 |
-0,204 |
-0,2 |
-0,199 |
|
|
|
Трапеція ІV |
|||||||||
|
0 |
4,0 |
8,0 |
12,0 |
16,0 |
17,0 |
20,0 |
|
|
|
0 |
1,142 |
0,966 |
1,006 |
1,008 |
1,012 |
0,998 |
|
|
|
0 |
0,04 |
0,08 |
0,12 |
0,16 |
0,17 |
0,2 |
|
|
|
0 |
-0,571 |
-0,483 |
-0,503 |
-0,504 |
-0,506 |
-0,5 |
|
|
За
видом
![]() визначаємо основні показники якості:
визначаємо основні показники якості:
час регулювання
 ;
;перерегулювання
 ;
;час першого узгодження
 ;
;час досягнення першого максимуму
Структурна схема системи для моделювання перехідного процесу за допомогою пакета “Matlab” та результати моделювання наведені на мал. 5.4. Основні показники якості мають такі значення:
![]()
![]()
Результати моделювання підтверджують показники, які визначені розрахунками за методом трапецій.



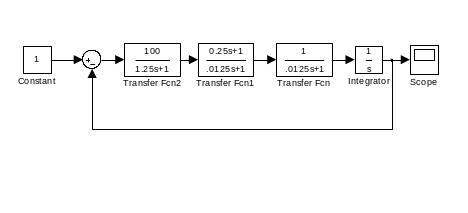
Мал.5.4. Моделювання
перехідного процесу в пакеті MATLAB
СПИСОК ЛІТЕРАТУРИ
А.А.Воронов, Теорія автоматичного управління . Частина 1. М: «Высшая школа» , 1986 , 367 с.
Ю.И.Топчеев, А. П. Ципляков Задачник з теорії автоматичного регулювання».М: «Машиностроение» , 1977 , 591 с.
Н.Н.Іващенко, Автоматичне регулювання, М:«Машиностроение», 1973, 607 с.
Г.Ф.Зайцев , Теорія автоматичного управління і регулювання , Київ , «Высшая школа» , 1975 , 421 с.
Е.А.Яшугін , Теорія лінійних безперервних систем автоматичного управління в питаннях і відповідях , Мінськ , «Высшая школа» , 1986 , 223 с.
В.М.Терехов, Елементи автоматизованого електропривода, М.:«Энерго-атомиздат» , 1987 , 222 с.
Методичні вказівки до курсової роботи з дисципліни «Теорія автоматичного управління», Кременчук, видавничий відділ КФ ХДПУ, 1988р., 41с.
Методичні вказівки щодо виконання практичних занять з навчальної дисципліни "Теорія автоматичного управління" Частина 1. Лінійні системи автоматичного управління для студентів денної та заочної форм навчання (у тому числі скорочений термін навчання) зі спеціальності 6.000000 – "Електромеханічне обладнання енергоємних виробництв"
Укладач ст. викл. В.О. Євстіфєєв
Відповідальний за випуск, зав. кафедри САУЕ Д.Й. Родькін
Підп. до др. _____________ . Формат 60х84 1/16. Папір тип. Друк ризографія.
Ум. друк. арк.____________ . Наклад__10__прим. Зам. №_____ . Безкоштовно.
Видавничий відділ КДПУ