

3.1.3. Определение необходимого и достаточного объема и состава информации о состоянии управляемого объекта для решения всех задач контроля и управления
На данном этапе необходимо выбрать минимальный объем и состав контролируемых параметров, с помощью которых можно обнаружить любое событие, записанное в диагональной матрице событий, а также выбрать тип и место установки датчиков и определить информационные единицы, т. е. те значения параметров, которые характеризуют момент наступления соответствующих событий.
В качестве метода решения на данном можно использовать метод преобразования диагональной матрицы событий в графе контроля событий.
Граф контроля событий представляет собой направленный граф без циклов (граф-дерево) с расставленными на нем контролируемыми параметрами (рис.3.3).
Процедура преобразования диагональной матрицы событий в граф контроля событий состоит в том, что за вершины элементарных графов графа-дерева принимаются события, лежащие на диагонали матрицы, а события, лежащие на вертикальных линиях соответствующих уровней диагностики, будут в гpaфе-дереве ветвями, исходящими из этих вершин. Например, событие 1 лежит на диагонали, поэтому оно выступает в качестве вершины элементарного графа, ветвями которого будут события 2, 3 и 4, лежащие на вертикальной линии первого уровня диагностики;
В свою очередь события· 2 . и 3 снесены на диагональ, т. е. они тоже являются вершинами своих элементарных графов, ветвями которых являются события 5,6 и 7 и 18,19 и 26 соответственно. Таким образом строится гpаф-дерево для всей диагональной матрицы событий.
Следующим этапом анализа является выбор контролируемых параметров. Он решается на основе использования графа контроля событий с учетом следующих рекомендации:
– выбор параметров для обеспечения возможности определения событий начинается с вершинного события 1 и производится по элементарным графам (уровням иерархии), начиная с верхнего;
– с целью минимизации числа измеряемых событии (параметров) в каждом элементарном графе, содержащем n событий, можно (n – 1) событие сделать измеряемыми, а одно оставшееся определять методом исключения;
– к событиям, определяемым методом исключения, целесообразно отнести трудноизменяемые параметры и события, которые невозможно проконтролировать измерением параметров.
Рассмотрим процесс анализа на нашем примере, при этом примем следующую систему кодирования:
– контролируемые параметры обозначены начальной буквой (температура –Т, давление – Д. уровень, установка регулятора – У; ток нагрузки – Н, конечные положения задвижек (клапанов) – З и К соответственно );
– выход параметра за верхнее (нижнее) допустимое значение обозначен
∆
треугольником над (под) символом параметра (Т, Н, и т.д.);
Ñ
– место установки датчика обозначено при символе параметра индексом, указывающим номер агрегата (Т4, Н34, Д10 и т.д.).
Вершинное событие 1 – перегрев подшипника – определяется измерением температуры подшипника, выход температуры за верхнее допустимое значение свидетельствует о наступлении события 1. Событие 2 – неисправность СЦМ – определяется путем измерения давления масла перед редyктором 2, событие 3 – исправность СРТМ – измерением температуры масла в баке 30. Событие 4 – неисправность подшипника – определяется методом исключения.
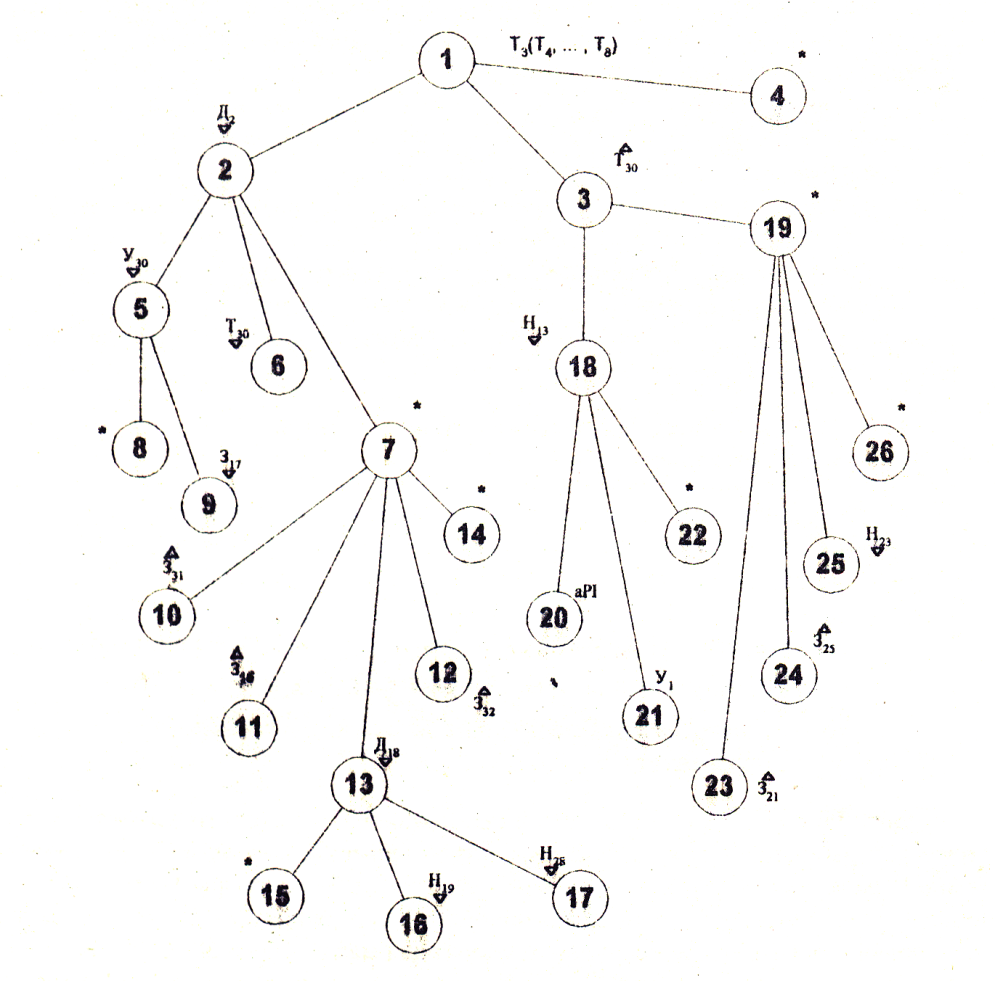
Рис. 3.3. Граф событий
Аналогичными рассуждениями обосновывается выбор остальных контролируемых параметров.
Обозначения контролируемых параметров показаны на графе контроля события (см. рис.3.3), при этом события, определяемые методом исключения, обозначены звездочкой «*»).
Следует заметить, что в отношении некоторых событий, для которых трудно подобрать контролируемые параметры, может быть использован метод активного контроля. Например, исправность регулятора P1, для которого практически нет датчиков исправного состояния, можно проверить следующим образом: оператор умышленно изменяет значение регулируемого параметра (Т30) (например отключив электроподогреватель и включив на большую мощность систему охлаждения), после чего, вновь подключив регулируемый элемент (электроподогреватель) к регулятору Р1, наблюдает за изменением темперaтуры. Если Т30 начнет возвращаться в исходное положение с заданной скоростью, то Р1 считается исправным.