

ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ ……………………………………………………………… 5 ЗАДАНИЕ НА КУРСОВОЕ ПРОЕКТИРОВАНИЕ…………… 8 РАЗДЕЛ 1. ВЫБОР ЭЛЕКТРООБОРУДОВАНИЯ……………… 12
1.1.Выбор электродвигателя…………………………………………….14 1.1.1. Определение режима работы электродвигателя………….. 14 1.1.2 Расчет эквивалентного момента на валу
электродвигателя……………………………………………….. 16
1.1.3. Определение необходимой скорости вращения
электродвигателя………………………………………………. 17
1.1.4. Определение мощности электродвигателя………………….. 17
1.1.5. Выбор электродвигателя по каталожным данным………….. 18
1.1.6. Проверка электродвигателя по условию перегрузки………..19
1.2. Выбор управляемого выпрямителя……………………………… 20
1.2.1. Краткий обзор существующих управляемых
преобразователей……………………………………………… 20
1.2.2. Выбор управляемого преобразователя………………………22
1.3. Выбор согласующего трансформатора……………………………. 23
1.4. Выбор датчика тока…………………………………………………. 24
1.5. Выбор уравнительного реактора…………………………………...26
1.6. Выбор тахогенератора……………………………………………… 26
1.7. Расчет параметров цепи «тиристорный выпрямитель -
двигатель постоянного тока»……………………………………… 27
1.8. Обоснование необходимости применения замкнутой
системы управления электроприводом…………………………… 29
1.9. Выводы по разделу………………………………………………….. 30 РАЗДЕЛ 2. РАСЧЕТ СТАТИКИ ЭЛЕКТРОПРИВОДА …. ……..32
2.1. Составление схем для расчета системы управления
электроприводом…………………………………………………… 33
2.1.1. Составление упрощенной принципиальной схемы………...33
2.1.2. Составление функциональной схемы……………………….. 33
2.1.3. Составление структурной схемы…………………………….34
2.2. Определение коэффициента обратной связи по скорости ………35
2.3. Определение напряжения задания задатчика скорости…………. 39
2.4. Определение коэффициента обратной связи по току…………… 40
2.5. Определение коэффициента усиления суммирующего
усилителя……………………………………………………………. 46
2.6. Построение статической характеристики электропривода
в замкнутой и разомкнутой системе управления…………………47
2.7. Выводы по разделу…………………………………………………..53
Раздел 3. Расчет динамики электропривода……….54
3.1. Составление структурной схемы электропривода
постоянного тока для расчета динамики…………………………. 55
3.2. Составление передаточных функций элементов………………… 56
3.2.1. Составление передаточной функции двигателя
постоянного тока……………………………………………. 56
3.2.2. Составление передаточной функции тиристорного
преобразователя (тиристорного выпрямителя)…………….. 57
3.2.3. Составление передаточной функции цепи обратной
связи по скорости…………………………………………… 58
3.3. Составление передаточной функции системы…………………… 60
3.4. Проверка устойчивости системы электропривода……………… 61
3.5. Синтез корректирующего устройства…………………………… 63
3.6. Построение переходного процесса в системе
электропривода……………………………………………………. 69
3.7. Оценка показателей качества……………………………………… 69
3.8. Выводы по разделу…………………………………………………..71 ВЫВОДЫ ПО КУРСОВОМУ ПРОЕКТУ………………………… 72 СПИСОК ЛИТЕРАТУРЫ ………………………………………….73 ПРИЛОЖЕНИЕ 1. Двигатели постоянного тока серии ПБСТ ………75 ПРИЛОЖЕНИЕ 2. Устройство комплектное тиристорное
серии УКЭ-Л……………………………………… 79 ПРИЛОЖЕНИЕ 3. Параметры схем выпрямления и данные
тиристорных преобразователей…………………..83 ПРИЛОЖЕНИЕ 4. Параметры согласующих трансформаторов……. 85 ПРИЛОЖЕНИЕ 5. Параметры датчиков тока……………………….. 86 ПРИЛОЖЕНИЕ 6. Принципиальная схема электропривода
постоянного тока………………………………… 87 ПРИЛОЖЕНИЕ 7. Корректирующие цепи………………………….. 90
ВВЕДЕНИЕ
Для современного промышленного производства характерно широкое внедрение автоматизированного электропривода - основы механизации и комплексной автоматизации технологических процессов.
Современный электропривод определяет собой уровень силовой электровооруженности труда и благодаря своим преимуществам по сравнению со всеми другими видами приводов является основным и главным средством автоматизации рабочих машин и производственных процессов.
Электропривод определяется как электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением. В отдельных случаях в этой системе - могут отсутствовать преобразовательное и передаточное устройство. Структура электропривода приведена на рис. 1.1.
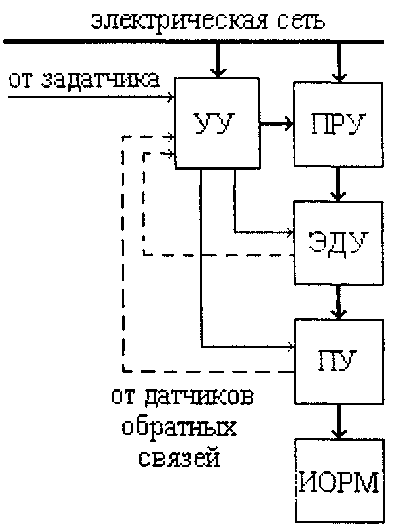
Рис. 1.1. Структура электропривода.
Она содержит преобразовательное устройство (ПРУ), определяемое как электротехническое устройство, преобразующее род тока, напряжение, частоту и изменяющее показатели качества элек-
трической энергии, предназначенное для создания управляющего воздействия на электродвигательное устройство.
Электродвигательное устройство (ЭДУ), является электротехническим устройством - электрической машиной, - предназначенным для преобразования электрической энергии в механическую или механической энергии в электрическую.
Передаточное устройство (ПУ) предназначено для передачи механической энергии от электродвигательного устройства электропривода к исполнительному органу рабочей машины (ИОРМ) и согласования вида и скоростей их движения.
Управляющее устройство (УУ), является электротехническим устройством, предназначено для управления преобразовательным, электродвигательным и передаточным устройствами. Управляющее устройство, как правило, содержит информационную часть, получающую информацию от задатчиков (сигнал задания) и датчиков обратной связи (сигнал о состоянии привода) и в соответствии с заданными алгоритмами вырабатывает сигналы управления.
Посредством системы электропривода приводятся в движение рабочие органы технологических (производственных) машин и осуществляется управление преобразованной энергией. Под управлением здесь понимают организацию процесса преобразования энергии, обеспечивающую в статических и динамических условиях требуемые режимы работы технологических машин. Если основные функции управления выполняются без непосредственного участия человека (оператора), то управление называют автоматическим, а электропривод - автоматизированным.
Параметрами электропривода являются скорость, нагрузка, диапазон регулирования, жесткость механической характеристики и электромеханическая постоянная времени.
Для управления электроприводами применяется множество различных устройств, однако, в настоящее время наиболее рациональным кажется использование тиристорного управления электроприводами. Для этой цели в разомкнутой или замкнутой системах управления электроприводами используют управляемые выпрямители (для систем с двигателями постоянного тока) и тиристорные регуляторы напряжения или преобразователи частоты (для систем с асинхронными двигателями).