

3.5. Синтез корректирующего устройства
Корректирующее устройство должно обеспечивать отсутствие статической ошибки регулирования, ограничить не - более заданного - перерегулирование и время регулирования [15].
Для корректировки рассчитываемой системы электропривода предлагается использовать последовательное корректирующее устройство, как более простое для расчета.
Не возбраняется использовать для этих целей параллельное корректирующее устройство, синтез которого подробно рассмотрен в [15,16].
Синтез корректирующего устройства осуществляется в несколько этапов.
Во-первых, необходимо построить асимптотические логарифмические характеристики системы электропривода. Для этого необходимо ранжировать постоянные времени в передаточной функции системы по убыванию, начиная с наибольших. Например T2>T3>T1. Необходимо отметить значения 1/Ti на оси абсцисс. Далее надо най-
ти значение выражения 20*lg(k), где k - коэффициент усиления системы. С точки (0; 20*lg(k)) начнем построение асимптотической логарифмической характеристики.
Коэффициент k определяет в (3.15) и (3.16) горизонтальную линию с наклоном 0 дб/дек, до первой точки 1/Ti. Далее множитель (Ti*p+1)-1 с соответствующим значением Тi, определяет наклон ха-
рактеристики на -20дб/дек, а множитель (Т2*р +2**T*p+l) - наклон характеристики на -40дб/дек после отметки 1/Tj.
Наклон последующих отрезков характеристики получается простым алгебраическим сложением (например, -20+(-20)=-40 дб/дек).
Типичные асимптотические логарифмические амплитудно-частотные характеристики представлены на рис.3.7.
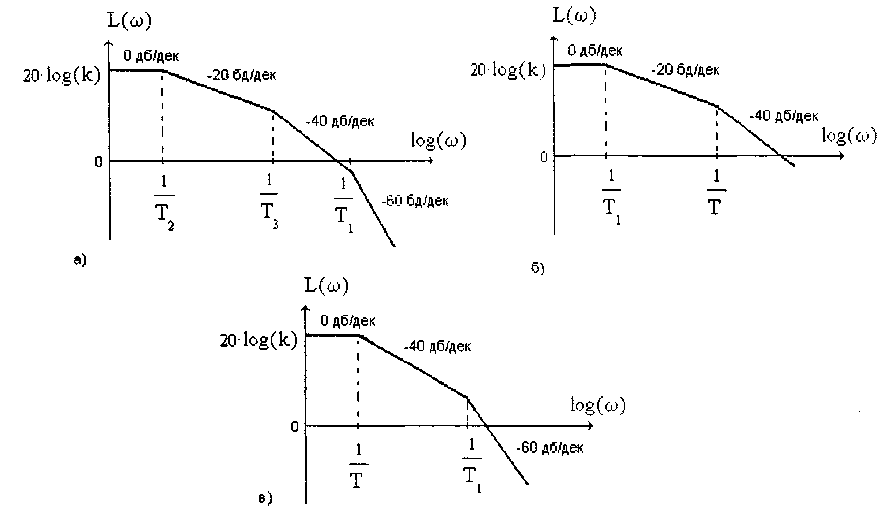
Рис.3.7. Типичные асимптотические логарифмические частотные характеристики системы.
Для передаточной функции системы вида (3.15) асимптотическая амплитудно-частотная логарифмическая характеристика будет иметь вид рис.3.7, а, для передаточной функции вида (3.16) -рис.3.11, б, при 1/Тi<1/Т и рис.3.11, в, при 1/Т<1/Тi.
Во-вторых, по заданным показателям качества необходимо найти частоту среза желаемой системы.
Воспользовавшись номограммами Солодовникова В.В. [15] рис.3.8, определим желаемую частоту среза, т.е. частоту, при кото-
рой желаемая асимптотическая амплитудно-частотная характеристика пересечет нулевую ординату.
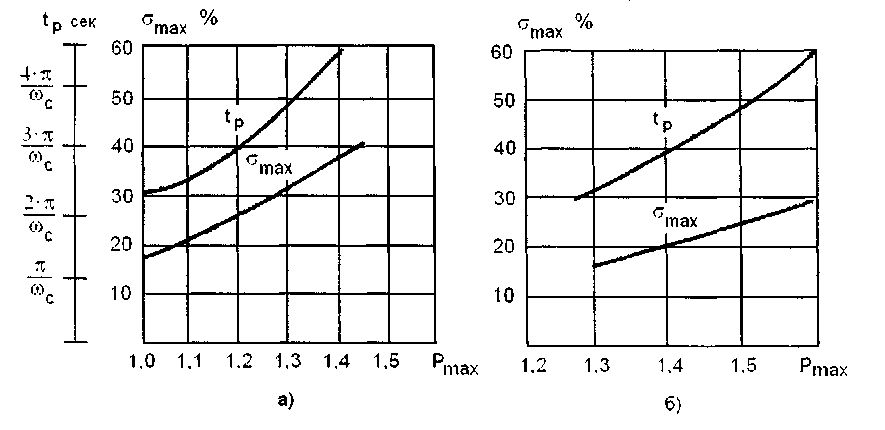
Рис.3.8. Номограммы Солодовникова В.В.
Задаваясь необходимым перерегулированием и временем переходного процесса, определим частоту среза [15]
(3.19)![]()
где Хтабл - коэффициент при значении tp по номограммам; tp - время регулирования, с.
В-третьих, необходимо построить желаемую асимптотическую логарифмическую амплитудно-частотную характеристику системы [15].
Построение желаемой характеристики (рис.3.9) начинаем со среднего участка. Через точку с координатами (с;0) проводим прямую (1) с наклоном -20дб/дек. Эта прямая будет ограничиваться в длину тем, что расстояние от нее до оси абсцисс не должно превышать запаса устойчивости по амплитуде (выберите его в пределах 15....20 дб).
Приступим к построению низкочастотной части. Это будет прямая (2) с наклоном -20 дб/дек (для исключения статической ошибки регулирования), которая проходит из области нижних частот, а именно из точки (lg()=0; 20*lg(k)), до первой частоты сопряжения.
Таким образом получаем две прямые с наклоном -20 дб/дек, которые в области низких частот можно соединить прямой (3) с наклоном -40 дб/дек или 0 дб/дек.
Высокочастотную часть (4) строим параллельно высокочастотной части асимптотической амплитудно-частотной характеристики некорректированной системы (см. пример рис.3.9).
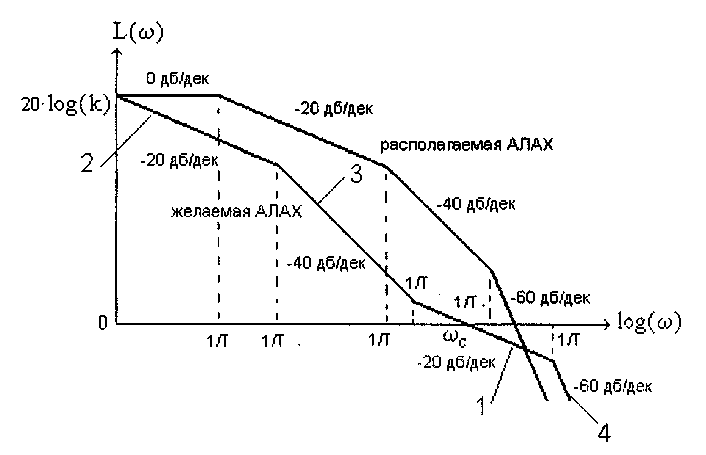
Рис.3.9. Пример построения желаемой асимптотической логарифмической амплитудно-частотной характеристики системы.
В-четвертых, необходимо построить логарифмическую характеристику корректирующего устройства.
Построение асимптотической характеристики корректирующего звена проводим исходя из соображения, что
ЛАХкоррекции()=ЛАХжелаемой () - ЛАХн е к о р р е к т и р о в а н н о й() (3.20)
Т.о., строя характеристику корректирующей цепи, необходимо графически вычесть характеристику некорректированной системы из характеристики желаемой системы. Сделаем это по рис.3.9 (см. рис.3.10).
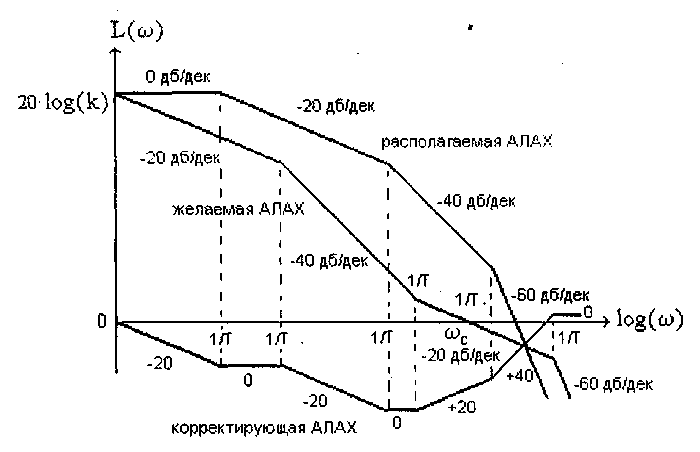
Рис.3.10. Построение асимптотической логарифмической амплитудной характеристики корректирующей цепочки.
Последнее, необходимо получить передаточную функцию корректирующего устройства.
Перед выбором корректирующей цепочки сделаем несколько замечаний.
Пассивные RC-цепи формируют амплитудно-частотную логарифмическую характеристику только под осью ординат, т.е. с коэффициентом усиления k<l. Характеристику над осью ординат, т.е. с коэффициентом усиления k>l, формируют активные корректирующие цепочки на операционных усилителях.
Если в передаточной функции корректирующей цепочки стоит интегрирующее звено, то первый отрезок логарифмической амплитудно-частотной характеристики наклонен на -40 дб/дек.
Передаточную функцию корректирующей цепочки формируют посредством составления ее числителя и знаменателя из сомножителей (Ti*p+1).
Несмотря на то, что получилась такая сложная характеристика, достаточно просто найти ее передаточную функцию. На первом участке - звено (Ti*p+1)-1, на втором - звено (Т2*p+1), которая определяет прямую с наклоном +20 дб/дек, а в итого два звена дают 0 дб/дек. Т.о. получаем передаточную функцию корректирующего звена
(3.21)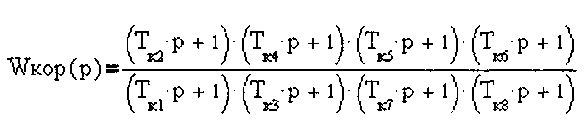

Корректирующие устройства выбираются из таблиц приложения 7 [15].
Для данной корректирующей цепочки приемлемой будет следующая структура
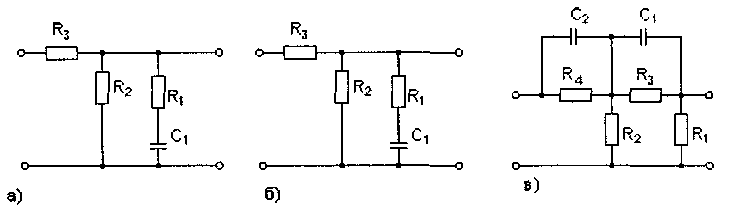
Рис.3.11. Корректирующие цепочки.
где постоянные времени, а, следовательно, и номиналы RC-элементов, можно найти из (3.21).
Для структуры рис.3.11 можно начертить следующие асимптотические логарифмические амплитудные характеристики
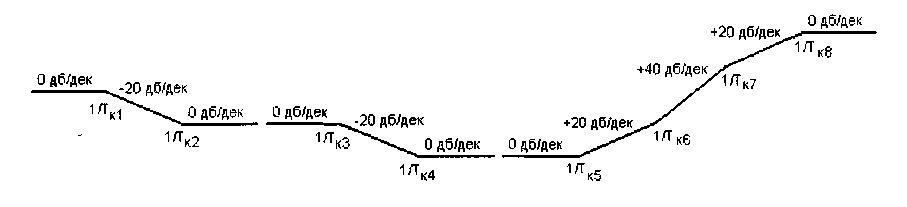
Рис.3.12. Характеристики корректирующей цепочки.
Т.о. видим, что характеристика корректирующей цепочки (рис.3.12) практически совпала с построенной на рис.3.10.
Определив передаточную функцию скорректированной системы проверим ее на устойчивость и определим запасы по амплитуде и по фазе..
Запасы по амплитуде (La) и по фазе (Lf) можно определить, построив логарифмические характеристики по подобию построения их в п.3.4 [15]. Эти значения могут использоваться для сравнения с нормами запасов по амплитуде и по фазе, обеспечивающими удовлетворительные показатели качества в системах управления и регулирования.