

2.2. Определение коэффициента обратной связи по скорости.
На основе структурной схемы системы (рис.2.2) для расчета обратной связи по скорости составим упрощенную структурную схему, принимая следующее:
- обратная связь по току не действует;
- рассматриваем установившийся режим работы (т.е. р—>0 и IС=0);
- т.к. рассматриваем замкнутую систему электропривода, то структурную схему составляем для системы «преобразователь -двигатель».
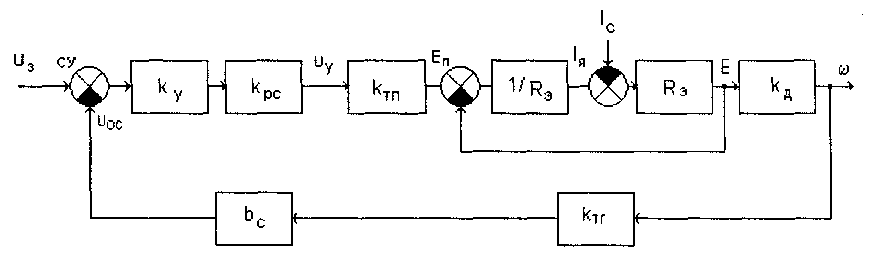
Рис.2.3. Структурная схема для расчета коэффициента обратной связи по скорости.
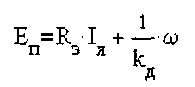
По упрощенной структурной схеме (рис.2.3) необходимо составить систему уравнений, описывающую статические характеристики электропривода, замкнутого отрицательной обратной связью по скорости [3,4]:
![]()
(2.1)
(2.2)
Здесь переменные: U3 - задающее напряжение, В;
Еп - выходная ЭДС тиристорного преобразователя, В;
- угловая скорость вращения двигателя, рад/с;
Rэ - эквивалентное активное сопротивление цепи «преобразователь-двигатель», Ом;
bс - коэффициент рассчитываемой обратной связи по скорости;
kTГ - коэффициент передачи тахогенератора, В*с/об;
к.дт - коэффициент передачи датчика тока, В/А;
ky - коэффициент усиления суммирующего усилителя, В/В;
kTП — коэффициент усиления тиристорного преобразователя, В/В;
kpc - коэффициент усиления регулятора скорости, В/В;
kД - конструктивный коэффициент двигателя;
Уравнение (2.1) - это уравнение связи входа и выхода преобразователя, а (2.2) — уравнение связи выхода преобразователя и электрической части электродвигателя (якорной цепи системы «преобразователь-двигатель»).
Решаем эту систему, подставляя в (2.1) уравнение (2.2)

(2.3)
В результате преобразований можно получить выражение для угловой скорости электропривода
(2.4)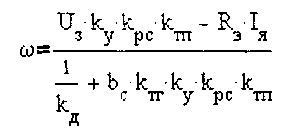
Или, что то же самое
(2.5)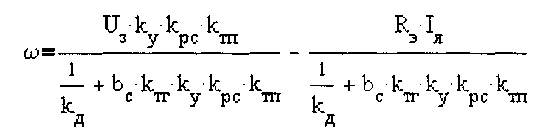
Так как в общем случае механическая характеристика электропривода представлена, аналогично (2.5), выражением [1]
(2.6)![]()
то из (2.5) можно записать
(2.7)
Уравнение стабилизации скорости в замкнутой системе как погрешность определяется через погрешность в разомкнутой системе р. Погрешность в разомкнутой системе выражается формулой
(2.8)![]()
Отсюда, соответственно погрешность в замкнутой системе
(2.9)
Погрешность в замкнутой системе электропривода зависит от значений коэффициентов обратных связей и коэффициентов усиления преобразователя и усилителя и тем ниже, чем выше значения указанных коэффициентов. Однако возможности используемых при этом обратных связей различны. Обратная связь по скорости является связью по выходному параметру и обеспечивает наибольшую точность стабилизации скорости (при ky*kTП—>oo, —>0). Обратная связь по напряжению обеспечивает стабилизацию напряжения на якоре двигателя, компенсируя падение напряжения в силовой цепи преобразователя. Предельной жесткостью характеристики является жесткость естественной характеристики двигателя (при ky*kTП -->oo,
37
—>IЯ*RЭ*kД). Положительная обратная связь по току, как связь по нагрузке двигателя, обеспечивает высокую точность стабилизации скорости (при ky*kTП*bT/RЭ =1, =0). Однако это возможно только в линейных системах. В реальных системах электропривода положительная связь по току не обеспечивает высокой точности стабилизации скорости из-за наличия нелинейностей в характеристиках усилителя и преобразователя, приводящих к криволинейности механических характеристик. Кроме того, система с положительной обратной связью по току имеет малый запас устойчивости и повышает склонность системы к колебаниям [1].
Введем следующие понятия:
р=р/0mах - статизм разомкнутой системы по отношению к максимальной скорости идеального холостого хода (2.10);
3=3/0 min - стататизм замкнутой системы (заданный статизм) по отношению к минимальной скорости холостого хода (2.11);
D=0 max / 0 min - заданный диапазон регулирования скорости
(2.12).
Преобразуя (2.9) получаем выражение
(2.13)
Выражаем отсюда коэффициент обратной связи по скорости
(2.14)
Обычно, для последующей корректировки, полагают, что kpc= 1
и ky=l [10], тогда
(2.15)
Для расчета коэффициента усиления обратной связи по скорости необходимо взять Р из (1.36) и 3=т р е б из табл. 1.6.