2.3. Определение максимального напряжения задатчика скорости
Напряжение задания, соответствующее верхнему уровню скорости, находим из (2.5) без нагрузки с одной обратной связью по скорости [10].
Для нахождения напряжения задания перепишем (2.5) в несколько ином виде
(2.16)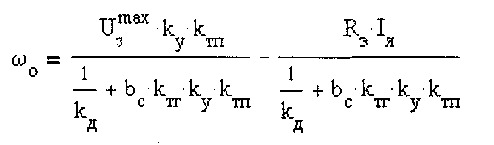
где 0 - скорость идеального холостого хода двигателя, рад/с.
Скорость идеального холостого хода на верхней и нижней границах регулирования находим из выражения
(2.17)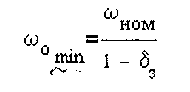
(2.18)
(2.19)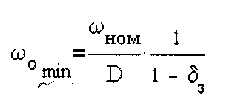
При kpc=l и ky=l получаем
Выражаем из этого выражения максимальное напряжение задания U3max, учитывая, что Iя=Iном- представляет собой номинальный ток двигателя
(2.20)
где 0 - скорость холостого хода, соответствующая верхнему уровню регулирования скорости.
2.4. Определение коэффициента обратной связи по току [10]
Требуется в соответствии со структурной схемой (рис.2.2) найти коэффициент обратной связи по току.
Составим систему уравнений, полностью описывающих систему «тиристорный преобразователь - двигатель постоянного тока», на основе структурной схемы (рис.2.2) [3,4]:
- уравнение связи входа и выхода тиристорного управляемого выпрямителя
(2.21)
- уравнение связи выхода преобразователя и электрической части электродвигателя (якорной цепи системы «преобразователь-двигатель»)
(2.22)
— уравнение связи входа и выхода механической части электродвигателя
(2.23)
Здесь переменные (см.п.2.2):
IЯ - ток якорной цепи двигателя, А;
IУ - ток уставки (отсечки) двигателя, А;
IС - ток статической нагрузки двигателя, А;
Rи - сопротивление измерительного резистора, Ом;
bт - коэффициент рассчитываемой обратной связи по току;
Тфтг - постоянная времени фильтра датчика скорости, с;
Тфдт - постоянная времени фильтра датчика тока, с;
Ттп - постоянная времени тиристорного преобразователя, с;
Тяц - электромагнитная постоянная времени главной цепи объекта управления, с;
Тмц - электромеханическая постоянная времени главной цепи объекта управления, с;
р - оператор Лапласа.
Все переменные типовых звеньев, которыми представлена рассматриваемая система электропривода, как элементы динамической системы подробнее будут рассмотрены в разделе 3.
Исследование работы электропривода производится отдельно по управляющему воздействию при Мс=0 (эквивалентно IC*RЭ=0) и по возмущающему воздействию при U3=0 или U3=const. Поэтому уравнение (2.23) необходимо переписать в виде
(2.24)
Настройку системы управления электроприводом производим при kpc=l, вследствие последующего введения корректирующих цепей.
Преобразуем уравнения (2.22) и (2.23) этой системы к более удобному виду
(2.25)
(2.26)
Подставляя (2.26) в (2.21) и (2.25), получаем систему
(2.27)
(2.28)
Преобразуя систему и подставляя (2.28) уравнение в (2.27), получаем
(2.29)
Выражаем угловую скорость вращения электродвигателя
(2.30)
(2.31)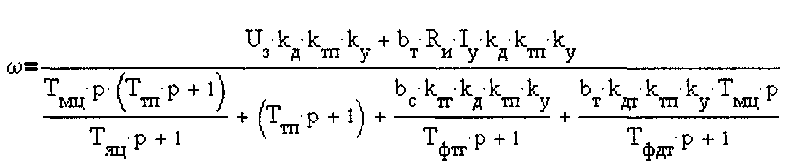
Рассмотрим отдельно знаменатель этого уравнения
(2.32)
Учитывая, что запаздывание в цепи обратной связи, обусловленное фильтрами на выходе датчиков, обычно невелико и характер изменения самой выходной величины примерно идентичен характеру изменения выходного напряжения датчика, можно в передаточной функции фильтров положить, что
(2.33)![]()
и, кроме того,
(2.34)
где![]()
(2.35)![]()
Здесь расчет постоянных времени рассмотрен в разделе 3 «Расчет динамики электропривода».
Поэтому (2.32) принимает вид
(2.36)
(2.37)

(2.38)

Выразим ЭДС электродвигателя (см.рис.2.2)

Рис.2.4. Звено конструктивного коэффициента электродвигателя.
(2.39)![]()
Учитывая (2.39) из (2.38) получаем выражение для ЭДС электродвигателя
(2.40)
Коэффициент усиления обратной связи по току bт находиться из условия ограничения тока в начальный период переходного процесса. Для этой цели понижаем порядок операторного уравнения (2.37) за счет пренебрежения малыми постоянными времени.
Зависимость ЭДС двигателя от времени можно получить решением операторного уравнения (2.40).
Вводим обозначения
(2.41)
Получим
(2.42)

Для получения зависимости ЭДС двигателя от времени дом-ножим (2.40) на 1/р
(2.43)
Решая это уравнение, получаем зависимость ЭДС электродвигателя во времени
(2.44)
Исходя из структурной схемы (рис.2.2), динамический ток [10]
(2.45)
Максимальный ток будет иметь место при t=0. Следовательно
(2.46)
Так как при t, близком к нулю, E(t)=0, будем считать, что обратная связь по скорости еще не действует (bс=0) - вследствие действия инерции двигатель еще не разогнался. При этих условиях уравнение (2.46) можно записать
(2.47)
Разность между максимальным током Imax и током уставки IУ должна быть меньше 0.2*Imax. Т.е. 0.8*Imax<Iy<Imax. Значение Imax берется не более допустимого по условиям коммутации в двигателе. Для электродвигателей постоянного тока значение предельно допустимого тока лежит в пределах Imах=(2..З)*Iном
Из (2.47) получим
(2.48)
При ky=l получаем
(2.49)
Учитывая, что
![]()
будет
Rи=R’и= RИ /RЭ
перепишем (2.49) в виде
(2.50)
2.5. Определение коэффициентов усиления суммирующего усилителя
Требуется найти коэффициенты усиления суммирующего усилителя по каналам задающего воздействия, напряжений обратной связи по скорости и току.
Коэффициент усиления суммирующего усилителя па каждому из каналов находится по однотипной формуле [13]
![]()
Для канала по задающему воздействию коэффициент усиления суммирующего усилителя находиться
![]()
Для канала обратной связи по скорости коэффициент усиления суммирующего усилителя можно найти
![]()
(2.53)
где из условия работы двигателя на максимальной требуемой угловой скорости вращения
(2.54)![]()
Для канала обратной связи по току коэффициент усиления суммирующего усилителя будет
![]()
(2.55)
где из условия протекания в якорной цепи двигателя при его работе на рассчитываемую нагрузку тока равного IПОТ
(2.56)![]()
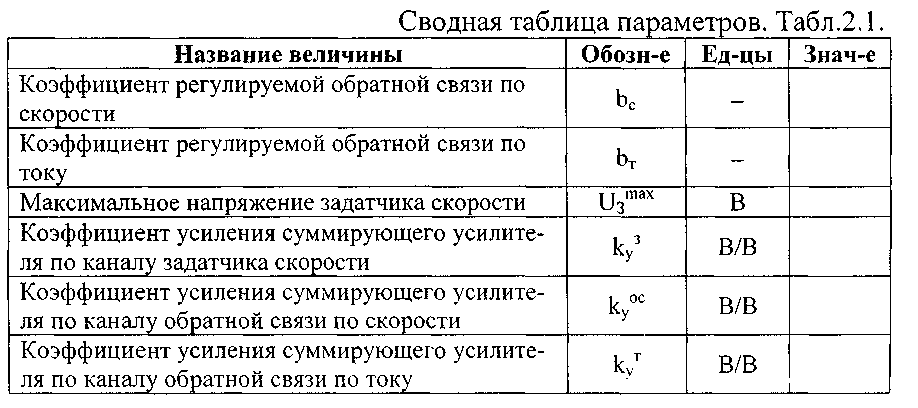
Для удобства построения статической характеристики следует внести все найденные значения в табл.2.1.