

3.6. Построение переходного процесса в системе электропривода
Для построения переходного процесса системы управления электроприводом постоянного тока по управлению необходимо составить его передаточную функцию замкнутой системы по управлению, пользуясь правилом
(3.22)
При этом учитываем, что составлять передаточную функцию необходимо для скорректированной замкнутой системы.
Необходимо представить полученную передаточную функцию в виде полинома
(3.23)
и, домножив на 1/р, совершить обратное преобразование Лапласа (легче всего проделать это в программе математических вычислений MathCad).
Получим выражение вида
(3.24)
После этого ничего не стоит построить переходный процесс по управлению, т.е. зависимость значения выходной регулируемой величины при изменении управляющей величины на единицу
3.7. Оценка показателей качества
Устойчивость является необходимым, не недостаточным условием работоспособности систем автоматического регулирования. Устойчивость системы регулирования означает лишь то, что в систем происходит затухание переходного процесса при воздействии управляющего или возмущающего внешних сигналов. Время затухание процесса, максимальное отклонение регулирующей величины и число колебаний в системе при этом не определяются, однако эти
величины являются очень важными показателями качества процессов регулирования.
Рассмотрим основные показатели качества систем автоматического регулирования, пользуясь характеристикой переходного процесса (рис.3.13).
Первый показатель качества - перерегулирование (рис.3.13)
(3.25)
Второй показатель качества позволяет оценить быстродействие системы и называется временем регулирования tp.
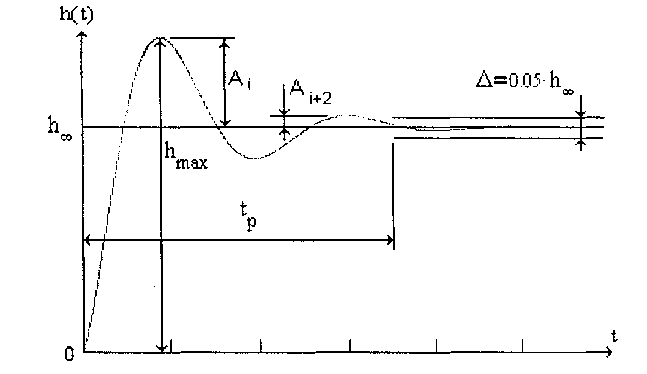
Рис.3.13. Характеристики переходного процесса.
Учитывая, что полное затухание в системе происходит лишь при t—>оо, условно стали считать концом переходного процесса точку пересечения графика этого процесса с линиями ±5% от величины единичного воздействия, откладываемыми от установившегося значения регулируемой величины.
Трений показатель качества характеризует число колебаний Np регулируемой величины в течение времени переходного процесса (это есть число переходов через установившееся положение за время регулирования).
Далее выделяются такие показатели, как степень затухания и показатель колебательности.
Степень затухания () характеризует быстроту затухания колебаний регулируемой величины относительно установившегося значения и рассчитывается по формуле
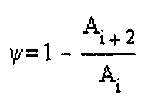
(3.26)
где Ai - отклонение регулируемой величины от установившегося значения (+/-).
Чем больше степень затухания, тем быстрее регулируемая величина придет к установившемуся значению.
Показатель колебательности (m) характеризует склонность электропривода к колебаниям и определяется
(3.27)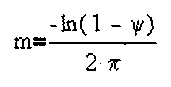
Чем больше показатель колебательности, тем меньше колебаний относительно установившегося значения совершит регулируемая величина до того как придет к установившемуся значению.
Определив все эти показатели составим сводную таблицу:

Необходимо сделать выводы о соответствии рассчитанных показателей заданным.