

Пеленгование светил. Точность поправки компаса
Выполнение пеленгования. Для пеленгования подбирают светила с наименьшей высотой (см. разд. 3.1.2.) в пределах до 35° при прямовидимом пеленговании и наименьшей скорости изменения азимута, т. е. около I-го вертикала (см. выводы изменения азимута в разд. 1.3.2.)
|
Рис. 55 |

Снятие ГКП и момента Т производят после нескольких «прицеливаний», пока не получится устойчивый результат или выполняют три измерения ГКП и Т с последующим их осреднением.
Процесс одновременного совмещения светила и пузырька уровня требует большой тренировки на ходу судна и особенно при качке.
Погрешность компасного пеленга. Погрешность в ГКП складывается из погрешностей гирокомпаса и погрешностей измерения пеленга.
Погрешность измерения пеленга возникает в основном от наклона плоскости пеленгования к истинному горизонту (рис. 56).
|
Рис. 56 |

А = k tgh (110)
При удержании пеленгатора в вертикале светила по уровню на ходу судна k 0,5° и при высотах до 20° погрешность оценивается величиной mКП = 0,3° [2].
Погрешность гирокомпаса (центральный прибор + репитер) в среднем принимается равной mГК=0,5° [2].
Погрешность ГКП относительно истинного меридиана mГКП = 0,6°.
Если полученная на ходу судна К = 0,5°, то ее принимают равной 0°.
26.27. Основы астр омс.
Задача определения места сводится к определению положения зенита относительно мест светил (ориентиров) на небесной сфере с переходом обратно на поверхность Земли.
Примечание. Решение задачи непосредственно на поверхности Земли (геоиде) значительно сложнее по сравнению с решением на сфере.
Связь места судна и положением его зенита. Географические координаты и точки М и небесные координаты его зенита z и t\s\up 6(z связаны соотношениями вытекающими из рис. 57.
|
Рис. 57 |

Sм – Sгр или на основании основной формулы времени как tCombin – tCombin, т. е.
(111)
= Sм – Sгр = tCombin – tCombin.
Вследствие суточного вращения сферы место зенита непрерывно перемещается по параллели, поэтому по формулам (111) получаем мгновенное место на момент Тгр измерения высоты.
Принципы определения места зенита. Для определения мгновенного места зенита (места судна) необходимо иметь данные измерений о его расположении относительно мест двух светил (рис. 58). В навигации, измеряемые физические величины U, являющиеся функциями координат и , называются навигационными параметрами [5].
Для светил может быть 8 таких параметров, однако в настоящее время на транспортном флоте применяется только параметр высоты. Весь процесс измерений и их обработки называют астрономической обсервацией.
Обработка наблюдений, т. е. определение обсервованного места, может выполняться различными методами [1, 2]. В настоящее время в основном используется графоаналитический метод (метод линий положения см. разд. 3.2.3.).
Графический метод, основанный на принципе навигационных изолиний, позволяет пояснить принцип и особенности астрономической обсервации.
|
Рис. 58 |
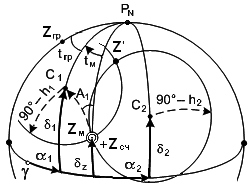
Последовательность выполнения решения обсервации по измерениям высот двух светил следующая:
нанести на сферу положение светил С1 и С2 по координатам и ;
проведя изолинии параметров измеренных высот (сферические круги радиусом равным Zi = 90° – hi), получим места двух зенитов;
действительное место зенита наблюдателя (Zм) определяется по дополнительной информации либо по зениту счислимого места (Zсч), нанесенного на сферу (координаты Sсч = Sгр \s\up 5(E и z = сч), либо по измеренному азимуту на любое светило (А1);
снять координаты точки зенита Zм (Sм и z) и по формулам (111) получить обсервованные географические координаты судна.
Кроме рассмотренных методов при решении астрономических задач на компьютере используется итерационный обобщенный метод наименьших квадратов, рассмотренный в курсе «Математические основы судовождения» [5].