

Исследовательская часть
В исследовательской части данного дипломного проекта будет разработана модель привода нажимного устройства. Программа для моделирования – Matlab 6.5 Simulink. Цель данного раздела – подтвердить правильность расчетов, произведенных в конструкторской части.
4.1. Моделирование в matlab
Модель асинхронного двигателя представлена на рис.4.1
Модель асинхронного двигателя в неподвижной системе координат
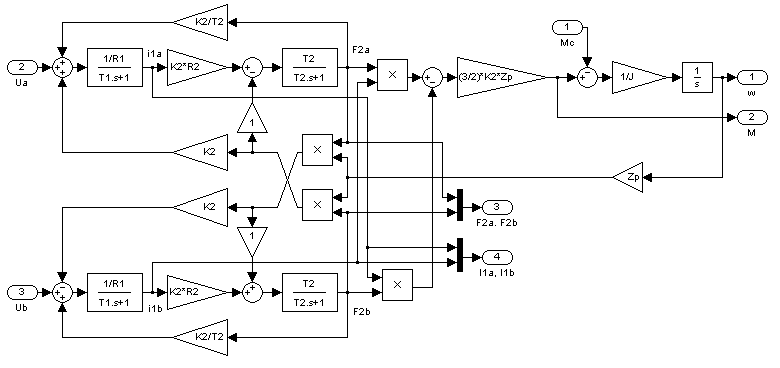
рис.4.1
В
неподвижной комплексной системе
координат вещественная ось обозначается
через α, а мнимая через β. Пространственные
векторы в этом случае раскладываются
по осям:
![]()
Системы уравнений двигателя имеет вид:
![]()
![]()
![]()
![]()
![]()
![]()
Результаты моделирования в неподвижной и во вращающейся системе координат являются полностью идентичными. Для анализа собственно электрической машины выбор системы координат не играет роли.
Так как структурная схема системы управления – во вращающейся системе координат, то для преобразования координат из вращающихся в неподвижные служит блок, представленный на рис.4.2.
Блок преобразования координат x,y – α,β
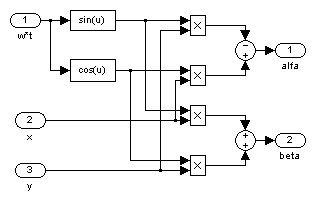
рис.4.2
На вход поданы напряжения во вращающейся системе координат Ux, Uy, представляющие постоянные величины, а также величина ωt – скорость вращения координат. На выходе блока формируются синусоидальные напряжения, управляющие моделью АКЗ в неподвижной системе координат.
![]() ;
;
![]()
Для подачи сигнала обратной связи по току в систему управления служит блок преобразования α,β – x,y, представленный на рис.4.3.
![]()
![]()
Блок преобразования α,β – x,y
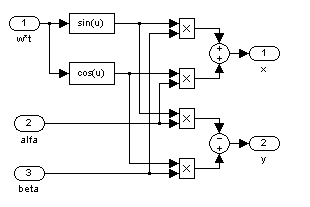
рис.4.3
Реактивный момент нагрузки реализуется схемой, представленной на рис.4.4.
Реактивный момент нагрузки
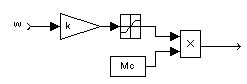
рис.4.4
Вычисление модуля потока реализуется схемой, представленной на рис.4.5.
![]()
Вычисление модуля потока
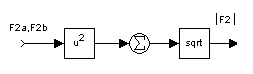
рис.4.5
Вычисление скорости вращения координат реализуется схемой, представленной на рис.4.6.
![]()
Вычисление скорости вращения координат
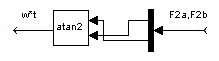
рис.4.6
Задатчик интенсивности представлен на рис.4.7.
Задатчик интенсивности
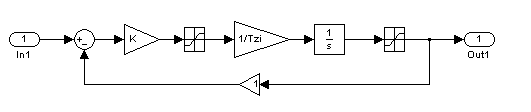
рис.4.7
Регуляторы системы управления построены на основе блока PID-контроллер, в котором задаются коэффициенты пропорционального, интегрального и дифференциального звеньев; ограничения выходных параметров регуляторов – блок Saturation; апериодическое звено – преобразователь – представлено блоком Transfer fcn. Задание на контур положения – выполнено блоком Timer, в котором в одной строке задаются значения времени, в другой – амплитуда сигнала в данный момент времени.
4.2. Анализ переходных процессов
Модель привода представлена на рис.4.8.
Из рис.4.9 видно, что тахограмма аналогична заданной, на нагрузочной диаграмме имеются пиковые броски моментов в конце режимов пуска и торможения.
На рис.4.10 изображены моменты каждого двигателя и эквивалентный момент.
Как видно из рис.4.11, где изображено перемещение винтов, за счет установки параболического регулятора перерегулирование отсутствует, привод отрабатывает перемещение точно, без ошибки. Время регулирования соответствует рассчитанной тахограмме и не превышает допустимое (табл.2.4).
На рис.4.12 и рис.4.14 - синусоидальные напряжения Uα,Uβ, управляющие моделью АКЗ в неподвижной системе координат, на рис.4.13 - напряжения во вращающейся системе координат Ux, Uy .
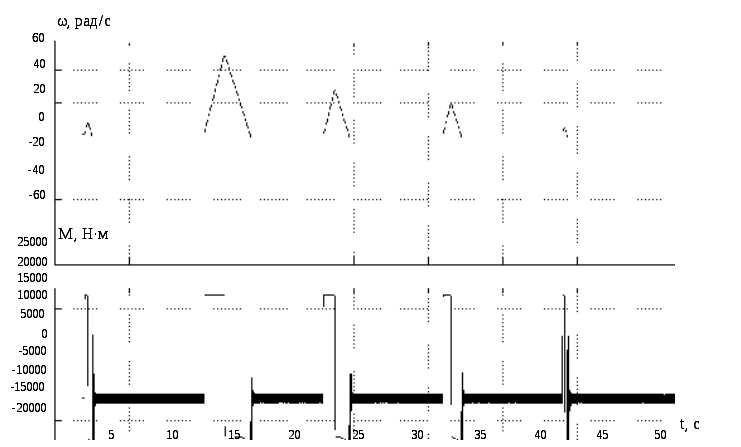 рис.4.9
рис.4.9
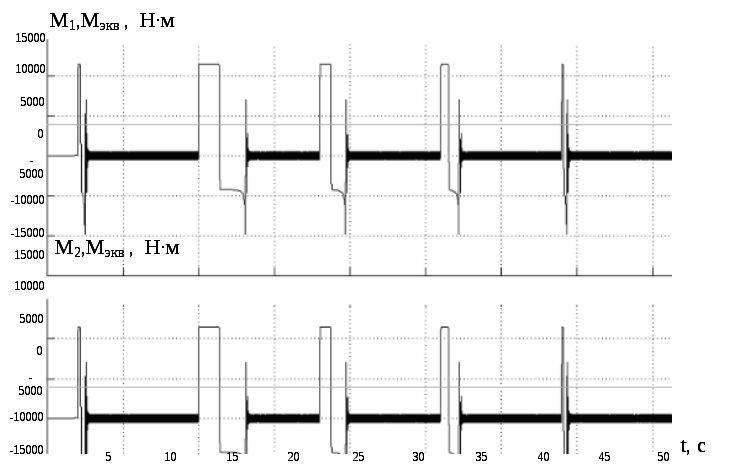 рис.4.10
рис.4.10
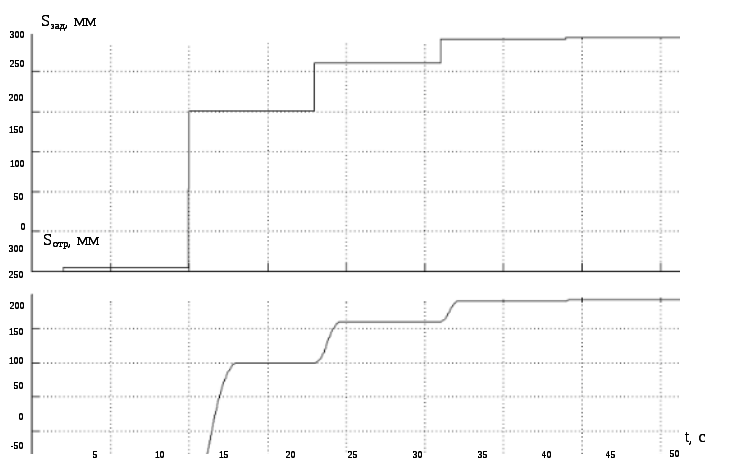 рис.4.11
рис.4.11
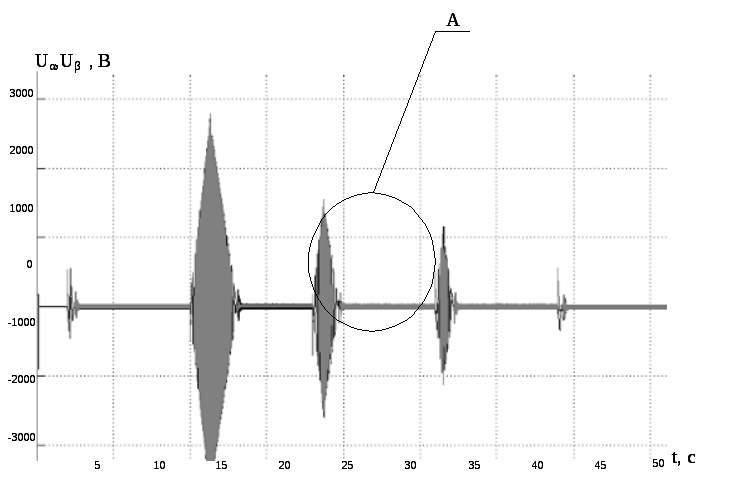
рис.4.12
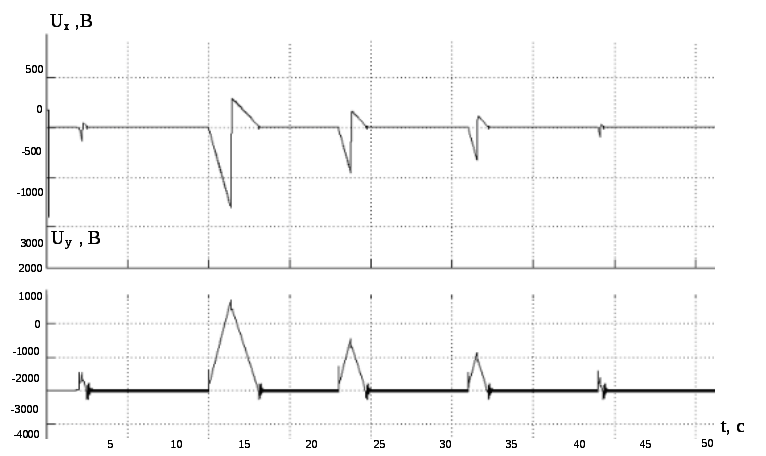 рис.4.13
рис.4.13
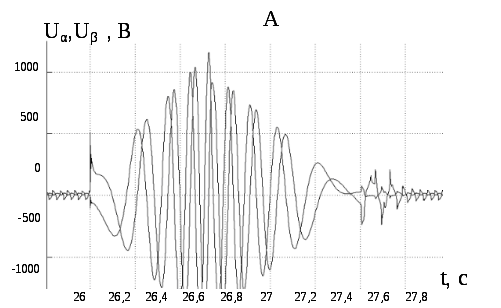
рис.4.14