

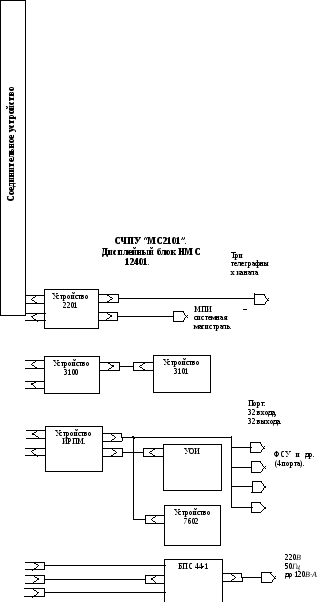
37. Устройство дисплейного модуля нмс 12401 учпу мс2101.(т.10 мпу)
Приложение 1
Устройство 2201 – вычислитель (ВЧС);
Устройство 3100 – контроллер с ЗУ ЦМД – внутреннее ЗУ ЦМД (32кб);
Устройство ИРПМ – интерфейс радиальный параллельный модернизированный;
УОИ – устройство отображения информации;
Устройство 3101 – кассета внешняя ЗУ ЦМД (32кб);
Устройство 7602 – клавиатура пульта оператора;
БПС 44-1 – блок питания.
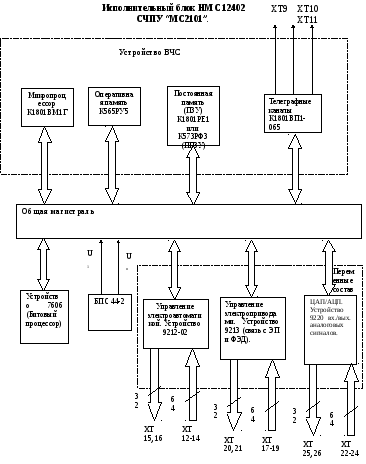
 38. Устройство
исполнительного модуля НМС 12402 УЧПУ
МС2101(Т.10 МПУ)
38. Устройство
исполнительного модуля НМС 12402 УЧПУ
МС2101(Т.10 МПУ)
Приложение 3
39. Структура и основные принципы работы вчс (вычислителя) (т. 10 мпу)
П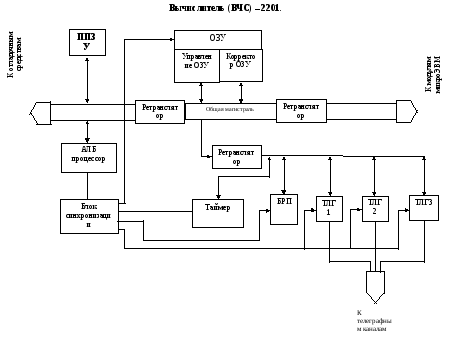 риложение
2 В целом
аппаратные средства МПС “Электроника
МС 2101” являются наборами модулей и
конструктивных блоков, но в основе
которых возможно построение систем для
управления различным оборудованием по
заказу потребителя. В составе МПС
используются три микроЭВМ, имеющие
отличающиеся ПЗУ, и системные программные
средства:
риложение
2 В целом
аппаратные средства МПС “Электроника
МС 2101” являются наборами модулей и
конструктивных блоков, но в основе
которых возможно построение систем для
управления различным оборудованием по
заказу потребителя. В составе МПС
используются три микроЭВМ, имеющие
отличающиеся ПЗУ, и системные программные
средства:
Электроника НМС 12401.1 – для управления устройством ввода/вывода, хранения, обработки, отображения информации и передачи её в ЭВМ (дисплейный блок – прил. 1);
Электроника НМС 12402.1 – для управления исполнительными органами станка, в т.ч. приводами подач и электроавтоматикой (исполнительный блок – прил.3);
Электроника НМС 12402.2 – для управления циклами работы оборудования дискретного действия в т.ч. и электроавтоматикой станка – программируемый логический контроллер (исполнительный блок – прил. 3);
Собственно сама микроЭВМ (Вычислитель 2201) входит во все три блока и аппаратно не отличается (прил. 2).
Все три блока могут иметь самостоятельное применение. Дисплейный блок может выполнять функции подготовки программ обработки деталей с удобным и оперативным отображением результатов расчётов в цифровом, смысловом и графическом виде. Исполнительные блоки могут заменять релейно-контактную аппаратуру в системах управления оборудованием как программируемые логические контроллеры.
Краткое описание модулей МПС.
Вычислитель (прил. 2).
Ретрансляторы – БИС К1801ВП1-26 (3 шт.);
ППЗУ – К573РФ3
ПЗУ – К1801РЕ2 (до 5 шт.) – 20к слов (40кб);
ОЗУ – К565РУ6А (24 шт.);
К1801ВП3-30;
К1801ВП1-28 (2 шт.);
БРП – К1801ВП1-31;
Таймер – К1801ВП1-38;
ТЛГ 1, 2, 3 – К1801ВП1-65 (скорость передачи до 19200бод);
– схемы гальванической развязки;
блок синхронизации:
кварц 8МГц: CLC1=4Мгц, CLC2=10Кгц для всех модулей блока;
500, 250, 100, 50, 10 Гц для БРП и таймера;
500Гц на выходной разъём для синхронизации нескольких блоков;
Кварц 4.608МГц: для ТЛГ;
Разъёмы на СМ по 32 контакта, внешние разъёмы на 64 контакта типа СНП59-64/94ХІІВ-23-ІВ.
40.Структура и основные характеристики плат ввода-вывода дискретных сигналов (Т.10 МПУ)
Модули УСО (прил. 3).
Питание
устройств электроавтоматики и других
дискретных устройств внешнее (![]() ).
).
9212 – Модуль связи с электроавтоматикой.
32 Выхода:
 ,
,
 (открытый
коллектор транзистора);
(открытый
коллектор транзистора);
 ,
,
 (активный
выход транзистора);
(активный
выход транзистора);
максимальная частота переключений 100кГц.
64 Входа:

 ,
,

 ,
,
Максимальная
частота опроса состояния входов – 50Гц.
![]() –
ток при логической “1”,
–
ток при логической “1”,![]() –
ток при логическом “0”. Все входы/выходы
гальванически развязаны от внешнего
электрооборудования. Напряжение изоляции
импульсное
–
ток при логическом “0”. Все входы/выходы
гальванически развязаны от внешнего
электрооборудования. Напряжение изоляции
импульсное![]() .
.
В модуль входят:
БРП – К1801 ВП1-31;
Ретранслятор – К1801ВП1-26 (2 шт.);
Буферные схемы – К1801ВП1-16 (6 шт.);
Схемы гальванической развязки (96 шт.);
Дешифраторы К555СП1 и др. элементы;
Две вилки на 32 контакта с выходом на СМ, вилка на 64 контакта для входа и две вилки по96 контактов для выхода на оборудование.
Адреса микросхем К1801ВП1-16: 1 .110.000.0 А7 1. А5 10. А2 А1 А0, где:
А0 – младший или старший байт;
А1- 1-ый регистр данных или второй;
А2 – бит адреса должен совпадать с состоянием входа VA2;
А5 – 1-ый или 2-ой блок контроллеров (А5=0 для 1-го блока, А5=1 для 2-го блока);
А7 – обращение к регистру данных или к регистру управления.
Сигналы адреса А3, А4 должны изменяться, если в блоке имеются несколько одинаковых модулей 9212 (допускается до 3-ёх). В этом случае для каждого модуля А3, А4 свои. Для этого используются сигналы VA4, VA5 в схемах задания адреса микросхем, в цифровых компараторах (дешифраторах адреса), а также на входах аппаратного задания адреса микросхем (БРП, таймер, ТЛГ).
В обычном режиме программа электроавтоматики запускается циклически каждые 20 мс. Микропроцессор опрашивает входные регистры платы 9212, сравнивает с их состоянием в предыдущем такте. Если произошли изменения по входам или имеются изменения по заданию на электроавтоматику, запускается соответствующий логический алгоритм программы встроенного контроллера, вырабатываются выходные сигналы и записываются в выходные регистры платы 9212.
Блок радиальных прерываний (БИС К1801ВП1-31) принимает радиальные запросы от 4-ёх входных сигналов 4-ех входных буферных регистров. Это самые ответственные неотложные входные сигналы (16 из 64 входов), требующие немедленного реагирования. БРП формирует запрос на векторное прерывание и при предоставлении прерывания выставляет на СМ вектор прерывания – начальный адрес программы обработки прерывания по данному радиальному запросу. Вектор прерывания записывается в программный счетчик микропроцессора вычислителя исполнительного блока. Программа преравыания начинает обрабатывалься.