

Волковой М.С. Метрология
.pdf201
где c – жесткость пружины, Δδ – сжатие (деформация) пружины.
Если измеряемое ускорение постоянно, а движение равноускоренное или равнозамедленное, то после некоторого переходного процесса инерционная масса, деформировав пружину, примет положение, соответствующее измеряемому ускорению. При этом
Fи = Fпр, cΔδ = ma, Δδ=ma. c
Для преобразования перемещения Δδ в электрический сигнал в акселерометрах используются резистивные, тензометрические, электромагнитные, емкостные, струнные и другие преобразователи. Минимальный диапазон Δδ составляет 0,1–10 мм, диапазон собственных частот не превышает 100 Гц.
На рис. 3.48 показана конструкция резистивного датчика линейных ускорений.
|
4 |
3 |
5 |
1 |
m |
|
x |
|
2 |
Рис. 3.48. Резистивный датчик линейных ускорений
В резистивном датчике линейных ускорений инерционная масса 3, смещаясь на величину Δδ, через систему рычагов перемещает щетку реостатного датчика 5, закрепленного в корпусе 1. Масса подвешена на пружине 4. Для демпфирования колебаний применяется устройство 2. При наличии равноускоренного движения в направлении Х масса m под действием силы инерции смещается вниз относительно корпуса, перемещая щетку. Серийно выпускаются акселерометры с реостатными датчиками типа ЭА- 8, ЭА-18А, ЭА-19, ЭА-20. Основная погрешность составляет ± (1–2) %.
Тензометрический датчик линейных ускорений, приведенный на рис. 3.49, может применяться для измерения как постоянных, так и переменных ускорений. Разработано несколько вариантов крепления инерционной массы и тензорезисторов. В простейших конструкциях чувствительный элемент выполнен в виде консольной балки постоянного по длине сечения и равного сопротивления, на которую наклеиваются тензорезисторы 2. Инерционная масса m закрепляется на свободном конце консоли.

202
2 |
|
x |
|
m |
x' |
|
|
1 |
|
3 |
|
Рис. 3.49. Тензометрический датчик линейных ускорений |
|
При равноускоренном движении корпуса 3 масса m под действием силы инерции будет смещаться относительно корпуса, деформируя балку. В более сложных конструкциях тензометрических акселерометров чувствительный элемент выполнен в виде двух консольных балок, на которые крепится инерционная масса. Для датчиков ускорений применяют тензодатчики. Коэффициент тензочувствительности Sm= 2±0,2. Номинальный рабочий ток ≈ 30 мА.
Полупроводниковые тензорезисторы позволяют получить при одних и тех же размерах сопротивления от 100 Ом до 50 кОм, а коэффициенты чувствительности от –100 до 200.
К недостаткам полупроводниковых тензорезисторов следует отнести их малую механическую прочность, высокую чувствительность к воздействиям внешней среды и существенный разброс характеристик.
В электромагнитных (индуктивных, дифференциальных индуктивных и дифференциальных трансформаторных) датчиках линейных ускорений инерционная масса – якорь – закреплена на пружинах и перемещается под действием ускорения относительно сердечника, на котором размещены одна или несколько обмоток.
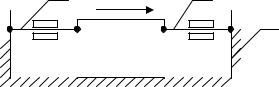
Для измерения линейных ускорений находят применение дифференциальные емкостные преобразователи, где линейный участок значительно больше. На рис. 3.50 приведена схема компенсационного датчика линейных ускорений с электромагнитным уравновешиванием. Инерционная масса 1 может перемещаться на опорах, к ней прикреплена катушка обратной связи 2. К инерционной массе крепится средняя пластина дифференциального емкостного датчика. При отсутствии ускорения С1 = С2 мост, образованный катушками L1 и L2 и этими емкостями, уравновешен: U = 0.
При наличии ускорения a (указано стрелкой) инерционная масса сместится влево, емкость дифференциального конденсатора С1 увеличится, а С2 уменьшится. Мост выйдет из равновесия, напряжение дебаланса моста U поступает на вход усилитель УС и выпрямляется с учетом сдвига фаз между опорным напряжением и напряжением с выхода усилителя.

|
|
203 |
|
1 |
2 |
|
3 |
a |
|
|
|
|
|
|
|
|
m |
N |
S |
C1 |
C2 |
|
|
U |
|
I1 |
R0 |
УС |
ФЧВ |
|
|
L1 |
L2 |
|
Ux |
|
|
|
|
|
~ |
|
|
Рис. 3.50. Cхема компенсационного датчика линейных ускорений с электромагнитным уравновешиванием
Выпрямленное напряжение с выхода фазочувствительного выпрямителя через резистор R0 подается на катушку 2 обратной связи. Средний ток I1, протекаяпо катушке 2, создает магнитное поле, которое, взаимодействуя с полем постоянного магнита 3, противодействует смещению массы и уменьшает ее смещение. Сила инерции Fи уравновешивается электромагнитной силой
Fэ = I1W,
где I1 – ток, протекающий по катушке, W – число витков катушки. При равенстве сил
ma = I1W,
или
I1 = m/Wa.
Ток I1, пропорциональный ускорению, протекает по резистору R0, формируя выходное напряжение
Ux I1R0 R0ma. W
Полярность тока определяет направление ускорения, а следовательно, и полярность выходного напряжения Ux.
204
Для измерения линейных ускорений могут применяться струнные вибрационно-частотные датчики. Для увеличения линейного участка датчики делают двухструнными (рис. 3.51). В корпусе 1 располагается инерционная масса m, к которой крепятся струны 2, 3, другие концы которых прикрепляются к корпусу.
2 |
a |
3 |
|
1 |
|
|
m |
|
|
|
Рис. 3.51. Двухструнный датчик
Струны из инвара предварительно натянуты и собственные частоты колебаний их одинаковы. При наличии ускорения a инерционная масса смещается в противоположную сторону, натяжение струны 3 увеличивается, а струны 2 уменьшается, следовательно, изменяются их частоты колебаний: f2 = f0 – f; f3 = f0 + f. Для выделения разности частот их необходимо подать на смеситель. Разность частот пропорциональна ускорению a. Недостатком струнных датчиков линейных ускорений является их временная нестабильность – натянутая струна испытывает механические напряжения, что вызывает релаксацию напряжения в ней, а также приводит к выползанию ее из зажимов. Генераторы возбуждения струн на рис. 3.51 не указаны.
3.2.4. Измерение параметров вибрации
Приборы для контроля и измерения параметров вибрации применяются при вибрационных испытаниях изделий и при эксплуатации различных агрегатов, в которых возможно появление вибрации, недопустимой для обеспечения их нормальной работы и длительной эксплуатации.
Измеряемыми параметрами вибрации являются среднеквадратические значения: виброперемещения, виброскорости, виброускорения и частоты вибрации.
Закон вибросмещения вибрирующей точки объекта:
Х = А sinωt,
где Х – вибросмещение, А – максимальная амплитуда вибросмещения, ω – частота вибрации.
Виброперемещения (амплитуду вибрации) измеряют виброметры, виброскорость – велосиметры, а виброускорения – акселерометры.
205
По физическому принципу различают преобразователи пьезоэлектрические, емкостные, тензометрические, вихретоковые, индуктивные, индукционные, магниторезисторные и др.
Взависимости от способа съема информации различают контактные
ибесконтактные преобразователи. Контактные крепятся на объекте контроля с помощью винтов, клея, мастики и т.п. Преобразователи характеризуются коэффициентом преобразования, диапазоном измеряемых перемещений, скоростей, ускорений, частот, температурным диапазоном, погрешностями измерения и т.д.
По принципу действия преобразователи разделяют на генераторные и параметрические. К генераторным преобразователям относятся пьезоэлектрические, индукционные и магнитомодуляционные (на эффекте Холла).
Преимущество бесконтактных преобразователей заключается в возможности проведения измерений с повышенной точностью в труднодоступных местах и в условиях высоких температур и агрессивных сред. В общем комплексе существующих датчиков наиболее полно требованиям практики удовлетворяют вибродатчики с пьезоэлектрическими преобразователями.
Пьезоэлектрические преобразователи вибрации
Для измерения динамических процессов наиболее широко применяются пьезоэлектрические преобразователи, в которых в качестве чувствительного элемента используются монокристаллические или поликристаллические материалы, обладающие пьезоэлектрическими свойствами. Область применения их непрерывно расширяется. Раньше их применяли для измерений только на высоких частотах. Сейчас они начали использоваться на частотах от единиц и десятых долей герца.
Успехи в электронике (разработка полевых транзисторов, модульных элементов) привели к созданию измерительных преобразователей, совмещающих в одном корпусе чувствительный элемент и согласующий усилитель, – пьезотронов. Для них не требуются дефицитные специальные антивибрационные кабели. Они позволяют устанавливать датчик от измерительной аппаратуры на любом расстоянии (в пределах нескольких сот метров). Однако динамический диапазон и температура ограничены возможностями деталей согласующего усилителя. Используя усилители заряда, можно устранить влияние длины соединительного кабеля на коэффициент преобразования.
Основные преимущества пьезоэлектрического преобразователя: широкий диапазон рабочих частот, большая вибрационная ударная прочность, простота конструкции, малая чувствительность к магнитным полям, возможность создания высокотемпературных преобразователей.

206
Основные недостатки: наличие большого выходного сопротивления, зависимость выходного напряжения от длины кабеля (при работе с усилителем напряжения) и невозможность измерения постоянной составляющей динамического процесса. Напряжение на выходе преобразователя
U |
q |
|
dP |
|
dm |
a пропорционально виброускорению, поэтому для выде- |
C |
C |
|
||||
|
|
|
C |
|||
ления сигнала виброскорости и вибросмещения в виброаппаратуре необходимо иметь два интегрирующих усилителя.
Индукционные преобразователи вибрации
Принцип действия индукционных преобразователей вибрации основан на законе электромагнитной индукции. Возникающая ЭДС прямо пропорциональна скорости изменения магнитного потока или скорости перемещения катушки в постоянном магнитном поле
E WBV,
где W – число витков, В – индукция постоянного магнита, V – скорость перемещения катушки относительно неподвижного магнита или скорость перемещения магнита относительно неподвижной катушки, причем вектор направления скорости расположен перпендикулярно плоскости витков катушки.
Индукционные преобразователи вибрации отличаются простотой конструкции и надежностью в эксплуатации, но нижняя граница рабочего диапазона ограничена частотой 8–10 Гц. Конструкция индукционного преобразователя вибрации приведена на рис. 3.52.
|
1 |
2 |
|
N |
3 |
4 |
5 |
|
|
S |
a |
|
|
|
6 |
Рис. 3.52. Конструкция индукционного |
|
преобразователя вибрации |
|

207
Различают индукционные вибропреобразователи с осевой и маятниковой подвеской сейсмомассы. Осевая подвеска характеризуется тем, что центры тяжести и жесткости лежат на одной линии, имеющей направление измеряемого колебательного движения, или совпадают. Такие преобразователи вибрации менее чувствительны к поворотам корпуса и в большинстве случаев не требуют регулировки. Корпус датчика 1 с помощью винтов крепится к исследуемому объекту. В корпусе 1 закрепляется обмотка 5. Инерционная масса (постоянный магнит 3) закрепляется на двух пружинах 2. При вибрации объекта корпус датчика вибрирует вместе с катушкой. Инерционная масса покоится, при этом в катушке наводится ЭДС (E = WBV). Измерительная обмотка состоит из двух половин, магнитные потоки в полуобмотках направлены встречно, благодаря этому уменьшается погрешность от влияния внешнего магнитного поля. Медный каркас 4, за счет наводимых в нем ЭДС и токов, служит для увеличения коэффициента успокоения. Амплитудно-частотные характеристики индукционных преобразователей вибрации обычно равномерны от собственной частоты до 100 Гц, затем амплитуда их плавно уменьшается и на частотах порядка 1 000 Гц составляет 60 % от равномерной.
Маятниковая подвеска характеризуется тем, что сейсмомасса совершает колебания – вращения вокруг оси подвески (рис. 3.53,а), причем кратчайшая линия, соединяющая центр тяжести массы с осью подвески, перпендикулярна направлению колебательного движения.
а |
|
1 |
б |
|
3
a
N
m
S
2
Рис. 3.53. Преобразователь вибрации с маятниковой подвеской
Если объект (рис. 3.53,б), на котором закреплен датчик, будет вибрировать в направлении стрелки а, то инерционная масса 1, стараясь сохранить состояние покоя, повернет якорь 2 в магнитном поле постоянного магнита 3. В катушке, размещенной на якоре, наведется ЭДС пропорционально скорости поворота якоря.
Маятниковая подвеска позволяет добиться сравнительно низких собственных частот при относительно малых габаритах и массе; недостатком маятниковой подвески является повышенная чувствительность к поворо-

208
там корпуса прибора, а также необходимость сравнительно частой регулировки положения.
Индуктивные и взаимоиндуктивные преобразователи вибрации
Действие индуктивных преобразователей вибрации основано на изменении индуктивного сопротивления
XL L W2 ,
Zm
где ω – частота питания, W – число витков катушки, Zm Z 2 |
|
, δ – |
|
||
|
S |
|
зазор, S – сечение магнитопровода.
Наиболее широко применяют индуктивные преобразователи с переменной величиной δ, или площади зазора, а также с подвижным цилиндрическим сердечником (плунжером). Преобразователи с переменной величиной зазора позволяют измерять виброперемещения от долей микрона до нескольких миллиметров. Линейный участок характеристики простейших индуктивных преобразователей составляет 0,1 от номинальной величины зазора. Преобразователи с переменной площадью зазора имеют лучшую линейность характеристики, которая составляет 0,4–0,6 от средней величины зазора.
Трансформаторный преобразователь вибрации, показанный на рис. 3.54, представляет собой устройство, в котором перемещение массы изменяет величину индуктивной связи между обмотками. Инерционная масса 1 (ферромагнитный стержень) подвешена на пружинах и находится в покое, а вибрирует объект и корпус преобразователя, установленный на объекте.
|
|
U1 |
5 |
|
|
|
|
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|
~UП |
Uвых = U1 |
– U2 |
|
|
|
||
|
4 |
3 |
|
|
|
|
|
|
|
x |
|
U2 |
|
|
|
|
|
|
|
|
Объект |
|
|
|
|
Рис. 3.54. Взаимоиндуктивный преобразователь вибрации |
|||

209
При движении объекта вверх электромагнитная связь между обмоткой питания 2 и выходной обмоткой 3 увеличивается, а между обмоткой питания и обмоткой 5 уменьшается. Поэтому напряжение U2 увеличивается, а U1 уменьшается. Разность напряжений – выходной сигнал пропорционален вибросмещению Δδ. Индуктивные и взаимоиндуктивные преобразователи отличаются простотой устройства, большой чувствительностью и не требуют дополнительного усиления. Частота источника питания должна быть больше верхней измеряемой частоты.
Вихретоковые преобразователи вибрации
Измерение параметров вибрации с помощью вихревых токов основано на регистрации изменений электромагнитного поля в зависимости от зазора между возбуждающей вихревые токи электрической катушкой и электропроводящей поверхностью изделия. На интенсивность и характер распределения вихревых токов, возбуждаемых на поверхности вибрирующего объекта, кроме контролируемого зазора существенное влияние оказывает толщина токопроводящего слоя, магнитная проводимость материала. Как известно, глубина проникновения магнитного поля (на этой глубине поле уменьшается до 5 %) в материал определяется формулой
Z0,05 |
|
2 |
, |
|
|||
|
|
|
|
где ω – частота магнитного поля, μ – магнитная проницаемость материала объекта, γ – электрическая проводимость материала объекта.
На низких частотах (50 Гц) для меди и алюминия значение Z0,05 составляет около 10 мм, на высоких частотах (500 кГц) глубина проникновения уменьшается до 0,1 мм. Как правило, частота тока питания вихретоковых преобразователей более 300 кГц.
Контроль вибрации с помощью вихревых токов обладает существенными преимуществами. Он является практически безинерционным, а пределы измерения частот вибраций лежат в диапазоне от нуля до сотен килогерц. Диапазон измерения амплитуды вибраций находится в пределах 10-9– 10-3 м. Метод позволяет проводить контроль при удалении преобразователя от регистраторов на сотни метров. Вихретоковые преобразователи имеют малое внутреннее сопротивление, нечувствительны к вибрациям поперечного направления и могут градуироваться статическим путем, не требуя применения калибровочных стендов и образцовой измерительной аппаратуры.

210
3.3. Методы измерения температуры
Температурой называется статистическая величина, характеризующая тепловое состояние тела и пропорциональная средней кинетической энергии молекул тела. За единицу абсолютной температуры принимается Кельвин (К). Относительная температура может быть представлена в градусах Цельсия (ºС) либо в градусах Фаренгейта (Европа и США). Нуль шкалы Кельвина равен абсолютному нулю, поэтому все температуры по этой шкале положительные.
Нуль шкалы Цельсия равен 273,16 К, а нуль шкалы Фаренгейта 305,16 К, и поэтому они могут быть и положительными, и отрицательны-
ми. Связь шкалы по Фаренгейту и по Цельсию: tC 5 tF 32 . 9
Температуру измерить непосредственно нельзя. Ее определяют косвенно – по изменению физических свойств различных тел. Практический диапазон: 1,5–105 К.
Разработана международная практическая температурная шкала (МПТШ-68), по которой установлен ряд реперных точек при давлении
Р = 101 325 Па:
0 К– абсолютный нуль;
13,81 К – тройная точка водорода;
20,28 К – точка кипения водорода;
27,102 К – точка кипения неона (Ne);
54,36 К – тройная точка кислорода;
90,188 К – точка кипения кислорода;
273,16 К – тройная точка воды , (P = 610 Па); 373,16 К – точка кипения воды; 692,73 К – точка затвердения цинка; 1235,08 К – точка затвердения серебра; 1337,58 К – точка затвердения золота. Выделяют семь шкал (участков):
1– (1,5–4,2)К (измеряют подавлениюпаров гелия-4);
2–(4,2–13,8)К (для измерения принятгерманиевыйтерморезистор);
3–(13,8–273,16)К (для измерения принят платиновыйтерморезистор);
4– (273,16–903,89)К (для измерения принятплатиновый терморезистор);
5– (903,89–1 337,58) К (для измерения принята платинародий-платиновая термопара);
6– (133,58–2800)К (для измерения принятыпирометры);
7– (2800–100 000)К (для измерения используются спектральные методы). Для измерения температуры могут применяться разные датчики
расширения, использующие температурное расширение жидких, газообразных и твердых тел.