

2.2 Кинематическая характеристика
Кинематическая характеристика показывает последовательность передачи движения от двигателя к рабочим органам машины и изображается в виде схемы. Она дает сведения о характере движения, величине передаточных отношений, угловой и линейной скорости, позволяет рассчитать траектории движения и возникшие ускорения движущихся масс машины. Кинематическая характеристика позволяет выявить наличие зазоров и оценить их влияние на изменение момента сопротивления и инерции при пуске. Используя передаточные отношения, определяют приведенный момента сопротивления и инерции.
Кинематическая характеристика транспортера заключается в следующем (рисунок 2.2). Ведущая звёздочка горизонтального транспортера получает движение от электродвигателя с помощью редуктора и ременной передачи, а наклонный с использованием только редуктора. Скорость движения транспортерной цепи горизонтального транспортера 0,19 м/с, наклонного − 0,72 м/с. Число зубьев приводной звездочки горизонтальной цепи Z=13, наклонной части Z=6. Зацепление с цепью у горизонтального транспортера осуществляется через зуб. Шаг цепи горизонтального и наклонного транспортеров 0,12 м. Шаг скребков горизонтального транспортеров 1,12м, наклонного − 0,65м. Усредненная масса одного метра цепи со скребками 6 кг.
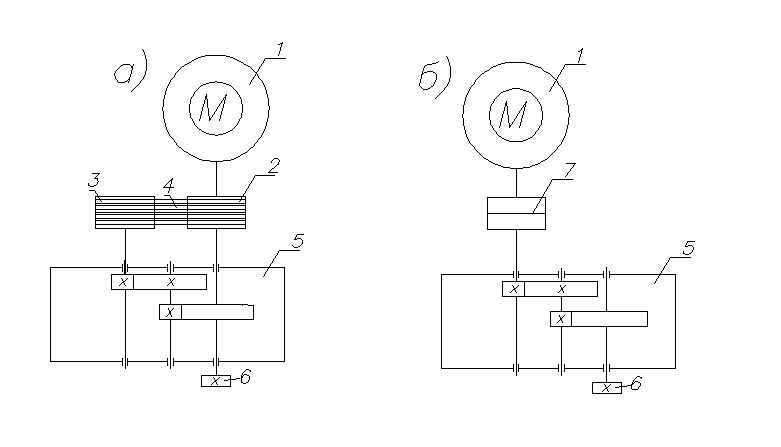
Рисунок 2.2 − Кинематическая схема горизонтального (а) и наклонного (б) транспортеров: 1 – электродвигатель; 2, 3 – многоручьевые шкивы; 4 – ремни; 5 – редуктор; 6 – приводная звездочка; 7 – соединительная муфта.
Учитывая небольшую частоту вращения приводных звездочек, выбираем для горизонтального транспортера электродвигатель с синхронной частотой вращения 1000 об/мин, для наклонного − 1500 об/мин.
Для определения передаточного отношения ременной передачи и редуктора определим угловую скорость ведущих звездочек.
Для горизонтального транспортера
![]() ,
рад/с
(2.2.1)
,
рад/с
(2.2.1)
где VЦГ=0,19 − скорость цепи горизонтального транспортера, м/с;
t=0,12 − шаг цепи транспортера, м;
ZГ=6 − число зубьев звездочки, участвующих в зацеплении.
![]() рад/с
рад/с
 Для
наклонного транспортера
Для
наклонного транспортера
![]() ,
рад/с (2.2.2)
,
рад/с (2.2.2)
где VЦН=0,72 − скорость цепи наклонного транспортера, м/с;
t=0,12 − шаг цепи транспортера, м;
ZН=6 − число зубьев ведущей звездочки.
![]() рад/с
рад/с
Общее передаточное число для горизонтального транспортера
![]() ,
(2.2.3)
,
(2.2.3)
где ![]() − синхронная угловая скорость двигателя
горизонтального транспортера, рад/с
− синхронная угловая скорость двигателя
горизонтального транспортера, рад/с
![]() ,
рад/с (2.2.4)
,
рад/с (2.2.4)
где ![]() =1000
− синхронная частота вращения, об/мин;
=1000
− синхронная частота вращения, об/мин;
![]() .72
рад/с
.72
рад/с
![]()
Передаточное число редуктора наклонного транспортера
![]() ,
(2.2.5)
,
(2.2.5)
где ![]() − синхронная угловая скорость двигателя
наклонного транспортера, рад/с
− синхронная угловая скорость двигателя
наклонного транспортера, рад/с
![]() ,
рад/с (2.2.6)
,
рад/с (2.2.6)
где ![]() =1500
− синхронная частота вращения, об/мин;
=1500
− синхронная частота вращения, об/мин;
![]() рад/с
рад/с
![]()
 Учитывая,
что для машин длинным тяговым или
рабочим органом не рекомендуются
червячные редукторы, выбираем для
горизонтального и наклонного транспортеров
цилиндрические редукторы. Их окончательный
выбор будет осуществлен после подсчета
передаваемой мощности на быстроходном
и тихоходном валу.
Учитывая,
что для машин длинным тяговым или
рабочим органом не рекомендуются
червячные редукторы, выбираем для
горизонтального и наклонного транспортеров
цилиндрические редукторы. Их окончательный
выбор будет осуществлен после подсчета
передаваемой мощности на быстроходном
и тихоходном валу.