

Работа 2 КИНЕМАТИЧЕСКИЙ АНАЛИЗ КУЛАЧКОВЫХ МЕХАНИЗМОВ
I. ЦЕЛЬ РАБОТЫ
Кинематический анализ кулачкового механизма методом графического диффе-
ренцирования диаграммы перемещения ведомого звена.
II. ОБЩИЕ ПОЛОЖЕНИЯ
Кулачковый механизм состоит из трех звеньев: кулачка, ведомого звена (толка-
теля или коромысла) и стойки. Кулачком называют звено, геометрический элемент
которого выполнен в виде поверхности переменной кривизны. Это позволяет получить необходимый закон движения ведомого звена. Для уменьшения трения ведомое звено обычно снабжается роликом, который является пассивным звеном, не из-
меняющим закона движения ведомого звена.
Форма геометрического элемента определяет профиль кулачка. Различают
действительный и теоретический профили. Теоретический профиль является экви-
дистантной кривой, отстоящей от действительного на расстоянии радиуса ролика по нормали к действительному профилю. Основные параметры профиля кулачка: Rо - начальный радиус (минимальный) профиля; Rмах – максимальный радиус; ϕ – профильные углы.
Основные геометрические параметры кулачкового механизма (см. рис. 1,2): профильные углы (угол подъема ϕп, угол верхнего выстоя ϕвв, угол опускания ϕо угол нижнего выстоя ϕн.в); ход толкателя Sмах; смещение толкателя е. В механизме со
смещенным толкателем профильные углы не равны соответствующим углам ϕ по-
ворота кулачка.
Если функция положения ведомого звена задана или определена в форме графика или в виде таблицы значений, то найти производную от этой функции в аналитической форме нельзя. В этом случае применяют графические методы дифференцирования, которые обладают простотой и наглядностью.
При решении задач кинематического анализа строят график перемещения ве-
домого звена механизма в функции времени или координаты перемещения ведущего звена. Графики скоростей и ускорений или их аналогов получают путем графического дифференцирования построенной кривой.
Например, имея модель кулачкового механизма можно с помощью измерений
получить данные и составить таблицу, характеризующую перемещение S толкателя в зависимости от угла ϕ поворота кулачка, а затем построить диаграмму S = f (ϕ). Графическим дифференцированием кривой S = f (ϕ) можно построить диаграммы передаточных характеристик (аналогов) скорости и ускорения толкателя.
Для выполнения графического дифференцирования разбивают ось абсцисс графика S = f (ϕ) на n равных частей (рис.1), заменяют плавную кривую ломаной линией, состоящей из хорд, проведенных на каждом участке кривой и соответствующих выбранным интервалам на оси абсцисс. Под графиком S = f (ϕ) проводят оси координат V и ϕ и на продолжении оси ϕ выбирают точку Р на расстоянии т от начала координат. Из точки P проводят лучи, параллельные хордам, до пересечения с осью ординат V. Затем на прямых, проведенных параллельно оси ординат через середины хорд, откладывают от оси абсцисс отрезки, отсекаемые соответствующими лучами на оси V. Считая, что тангенс угла наклона каждой из хорд пропорциона-
лен среднему значению производной, эти отрезки изображают значения аналогов скорости (передаточной характеристики) V = dS/dϕ в определенном масштабе с ко-
8

эффициентом Kv=Ks/mKϕ, где Кs – масштабный коэффициент
Рис. 1
Рис. 2
9

перемещения толкателя, мм/мм; Кϕ – масштабный коэффициент угла поворота кулачка, рад/мм; т - расстояние точки P от начала координат, мм.
При заданном значении угловой скорости ω вращения кулачка связь между ско-
ростью V1 и передаточной характеристикой скорости V толкателя выражается зави-
симостью
V1 = dSdt = ddSϕ ddtϕ = ωV
III. ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
Модель кулачкового механизма (рис. 2) состоит из кулачка 1 и смещенного толкателя 5. Кулачек при помощи рукоятки 8 можно вращать, при этом углы поворота кулачка отсчитываются по лимбу 7. На диске 3, удерживаемом от поворота стопором 6, закреплена направляющая 4 толкателя 5. Перемещение ведомого звена механизма измеряется по шкале на направляющей 4. Макет кулачкового механизма допускает осуществление инверсии. С этой целью необходимо освободить стопором 6 диск 3 и закрепить кулачок 1 на стойке с помощью винта 2. При вращении диска 3 посредством ручки 9 толкатель совершает сложные движения, что позволяет наглядно определить класс кулачковой пары.
IV. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
При выполнении лабораторной работы необходимо:
1.Закрепить диск 3 стопором 6 и освободить кулачок 1 при помощи винта 2.
2.Поворачивая кулачок через каждые 15°, измерить перемещение толкателя и записать данные в таблицу.
3.Построить диаграмму S=f(ϕ) перемещения толкателя в зависимости от угла поворота кулачка.
4.Построить передаточную характеристику скорости (аналога скорости) толка-
теля V= f(ϕ), выполнив графическое дифференцирование диаграммы S= f(ϕ).
V. СОДЕРЖАНИЕ ОТЧЕТА
1 .Наименование работы.
2. Схема механизма.
3.Таблица с результатами измерений перемещений толкателя и углов поворота кулачка.
4.Диаграммы перемещений толкателя S= f(ϕ) и передаточной характеристики (аналога) скорости V= f(ϕ).
5.Выводы.
Литература: [2], с. 32,33.
10
Работа 3. СТРУКТУРНЫЙ И КИНЕМАТЧЕСКИЙ АНАЛИЗ ЗУБЧАТЫХ ПЕРЕДАЧ
I. ЦЕЛЬ РАБОТЫ
Ознакомление с кинематическими схемами, структурным анализом, определе-
нием кинематических характеристик основных зубчатых передач.
II. ОБЩИЕ ПОЛОЖЕНИЯ
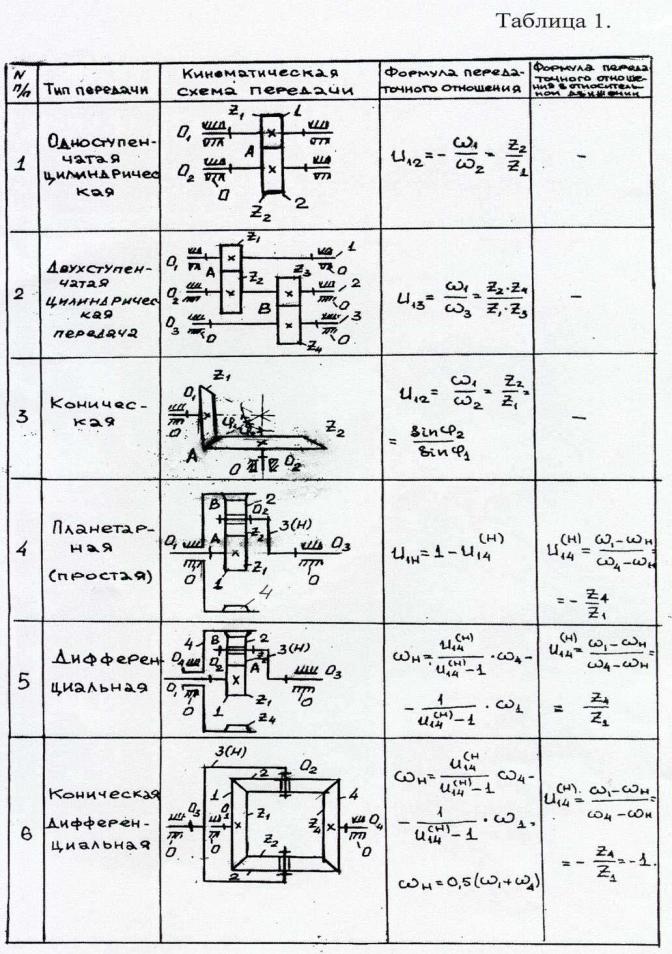
Передачами называют механизмы, звенья которых совершают непрерывное вращательное движение с постоянным передаточным отношением угловых скоростей.
Трехзвенные передачи (табл. 1 п. 1) состоят из двух подвижных звеньев 1,2 и
стойки О. Звенья 1 и 2 образуют со стойкой вращательные пары 01 и 02 пятого клас-
са, а между собой -зубчатую пару А (пару зацепления) четвертого класса. В зависи-
мости от расположения осей вращения звеньев, передачи разделяют на плоские механизмы с параллельно расположенными осями (табл.1 п. 1,2,4,5), с пересекаю-
щимися осями вращения звеньев (конические) (табл.1 п. 5,6) и со скрещивающимися осями вращения - пространственные (червячные).
Основной характеристикой передач является передаточное отношение
u |
|
= |
ω1 |
||
1n |
ω |
n |
|||
|
|
||||
|
|
|
|
||
где ω1 – угловая скорость ведущего звена;
ωn – угловая скорость ведомого (выходного звена). Если ведущее и ведомое
звенья вращаются в одном направлении, передаточному отношению приписывается знак плюс, в противном случае – знак минус.
Многозвенные передачи образованы путем последовательного и параллельно-
го соединения трехзвенных передач и, в частности, представляют собой многосту-
пенчатую передачу (табл. 1 п. 2) (двухступенчатую).
Планетарными называются такие зубчатые передачи, у которых одна из гео-
метрических осей является подвижной. При этом звено с подвижной осью вращения называется сателлитом (табл. 1 п. 4, 5, 6) – звенья 2. Звено образующее с сателли-
том вращательную пару О2, называется водилом 3 (Н). Входящие в зацепление с сателлитом зубчатые колеса, геометрические оси которых совпадают с осью вращения водила, называются центральными колесами звено 1 (табл. 1 п. 4, 5), звенья 1,4 (табл. 1 п. 6). Планетарные передачи делятся на два типа: простые (табл. 1 п. 4) и
дифференциальные (табл.1 п. 5, 6).
Простыми называются планетарные передачи, в которых одно из центральных колес неподвижно (табл.1 п.4) зубчатое колесо звено 1. Эта передача состоит из центрального колеса 1, сателлита 2, водила 3(Н) и неподвижного колеса 4. Сателлит 2 образует с центральным подвижным колесом 1 внешнюю пару зацепления А (зубчатую пару), а с неподвижным центральным колесом 4 внутреннюю пару зацепления В (табл. 1 п. 4). Центральное подвижное колесо 1 образует со стойкой O вращательную пару О1. Водило 3(Н) образует с сателлитом 2 и со стойкой О вращательные па-
11
ры О2 и O3 (табл. 1 п. 4).
Если во вращательном движении участвуют оба центральных колеса 1 и 4, то
такая передача называется дифференциальной (табл.1 п.5, 6). В ней колесо 4 представляет отдельное звено и образует со стойкой вращательную пару O4 (табл.1
п.5,6).
Передаточное отношение планетарной передачи выражается через передаточное отношение соответствующей простой, полученной из планетарной методом ин-
версии (обращения), если в качестве стойки принимается водило. Связь между пе-
редаточным отношением планетарной и простой передач устанавливается с помощью формулы Виллиса
u (н) = |
ωgr |
= |
ωg |
−ωн |
, |
|
ωnr |
ωn |
−ωн |
|
|||
gn |
|
|
(1) |
где ωgr, ωnr – угловые скорости зубчатых колес в относительном движении (относительно водила) при остановленном водиле;
ωn – угловая скорость водила (переносное движение);
u (gnн) – передаточное отношение в относительном движении от зубчатого колеса
n к зубчатому колесу g с остановленным водилом, т.е. передаточное отношение простой передачи, полученной из планетарного механизма при остановке водила. Очевидно, что при передаче движения в обратном направлении получим
u (н) = |
ωgr |
= |
ωg |
−ωн |
, |
|
ωnr |
ωn |
−ωн |
|
|||
gn |
|
|
(2) |
III.ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
Вкачестве лабораторной установки используются макеты передач, которые
имеются в лаборатории.
12
13

IV. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1.Уяснить назначение и принцип работы механизма.
2.Изобразить кинематическую схему механизма, применяя условные обозна-
чения ГОСТ 277076 «Условные обозначения кинематических схем механизмов».
3.Указать на кинематических схемах цифрами звенья .начиная с ведущего зве-
на, обозначить прописными буквами кинематические пары.
4.Определить число звеньев и число кинематических пар четвертого и пятого
классов.
5.Определить степень подвижности механизма.
6.Подсчитать числа зубьев колес и определить передаточное отношение пе-
редачи.
7.Измерив высоту зуба h, определить нормальный модуль зацепления
m n = 2,h25 и округлить полученное значение до стандартного значения. Методом об-
катки зубчатого колеса по бумаге, по следу зуба определить угол наклона зуба к об-
разующей цилиндра зубчатого колеса. По следу зуба и образующей цилиндра зубчатого колеса определить торцевой модуль зацепления т^ и проверить полученное
значение угла наклона зуба
|
|
|
β = arccos |
mn |
|
|
|
|
|||||
|
|
|
m t |
|
|
|
|
|
|||||
8. Определить основные геометрические параметры зубчатых колес: |
|||||||||||||
диаметры выступов – dai (путем замера); |
|
|
|
|
|||||||||
диаметры делительных окружностей d i = |
|
m n Zi |
|||||||||||
|
|
|
; |
|
|||||||||
2 cos β |
|||||||||||||
диаметры впадин dfi |
= di −2,5mn |
; |
|
|
|
|
|
|
|
|
|||
диаметры выступов |
d ai = di |
+2m n (сравнить полученные значения с изме- |
|||||||||||
ренными); |
|
d1 |
+d2 |
|
mn (z1 + z2 ) |
|
mt (z1 + z2 ) |
|
|||||
межосевое расстояние αw = |
= |
= |
|
||||||||||
2cosβ |
2cosβ |
|
|||||||||||
|
|
|
2 |
|
|||||||||
Для прямозубых колес β=0
V.СОДЕРЖАНИЕ ОТЧЕТА
1.Изобразить кинематические схемы механических передач с нумерацией
звеньев, обозначением кинематических пар и их наименованием.
2.Расчет передаточного отношения.
3.Результат измерений.
4.Вычисления геометрических параметров передач.
5.Выводы.
Литература:[1]с.315...335,[2]с.235...252.
14