

Работа 4 ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ ПЛАНЕТАРНОГО ЗУБЧАТОГО РЕДУКТОРА
I. ЦЕЛЬ РАБОТЫ
Экспериментальное определение коэффициента полезного действия плане-
тарного зубчатого редуктора.
II. ОБЩИЕ ПОЛОЖЕНИЯ
При работе планетарного зубчатого редуктора часть мощности, подводимой к
ведущему валу, затрачивается на преодоление сил трения в зацеплениях зубчатых
колес, в подшипниках и на перемешивание и разбрызгивание масла (если зубчатые колеса работают в масляной ванне). Величина потерь мощности на трение влияет на коэффициент полезного действия (КПД) механизма. КПД планетарных механиз-
мов зависит от основной характеристики этих механизмов, представляющей собой
передаточное отношение в относительном движении u13(н) (от центрального колеса 1
к центральному колесу 3 относительно водила Н). Кроме того, КПД зависит от направления силового потока, т.е. от того, передается ли в механизме мощность от центрального колеса 1 к водилу Н или, наоборот, от водила Н к центральному колесу 1.
В двухступенчатом планетарном механизме (рис.3), который используется в лабораторной работе, ведущим звеном является центральное колесо 1, а ведомым
– водило Н.
КПД планетарного механизма с ведущим центральным колесом 1 можно опре-
делить по формуле
η1H |
= |
1−u |
13(H ) |
η(H ) |
|
|||
|
|
|
|
|
, |
(1) |
||
1 |
−u |
( H ) |
||||||
|
|
13 |
|
|
||||
где η – КПД простой зубчатой передачи (в которой остановлено водило).
При экспериментальном определении КПД планетарного редуктора используется формула
η1H = |
N2 |
= |
|
T2 |
|
(2) |
||
N |
1 |
T u(3) |
|
|
||||
|
|
1 |
1H |
|
|
|||
где N2 и T2 – мощность и крутящий момент на ведомом валу; N1 и T1 – мощ- |
||||||||
ность и крутящий момент на ведущем валу редуктора; u1(3H) = |
ω |
|
||||||
1 |
– передаточное от- |
|||||||
ω |
||||||||
|
|
|
|
|
|
|
2 |
|
ношение редуктора. Здесь ω1 и ω2 угловые скорости ведущего и ведомого валов.
III. ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
Лабораторная установка типа ДП5А предназначена для экспериментального
определения КПД планетарного зубчатого редуктора при различных угловых скоростях и нагрузках. Уcтановка (рис. 4) состоит из следующих основных узлов: электродвигателя 1, тахометра 2, редуктора 4, нагрузочного устройства 6,измерительных устройств 3 и 5. Узлы установки смонтированы на литом основании. Для управления работой установки на основании имеется панель управления. Блок питания изготовлен в виде отдельного прибора.
15
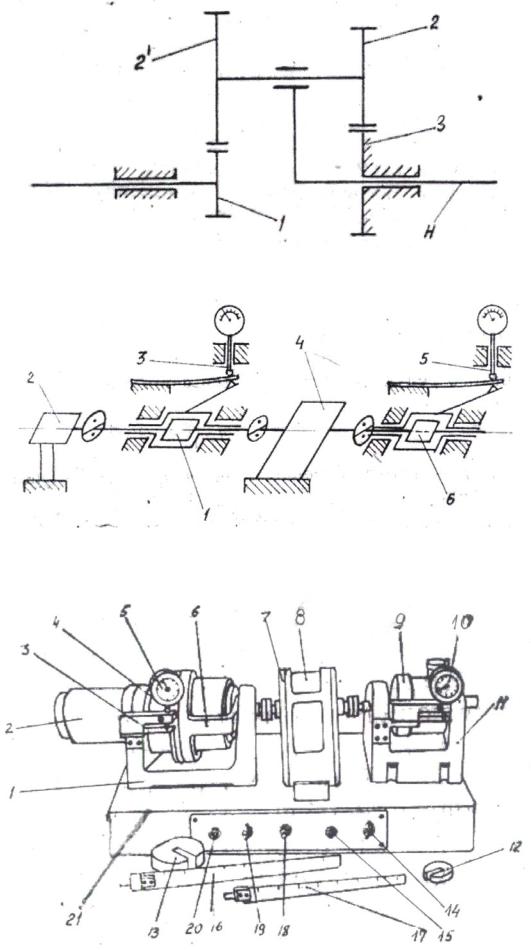
Рис. 3
Рис. 4
Рис. 5
16
Электродвигатель типа СЛ521К (мощность 20 Вт, напряжение 110 В, ток посто-
янный, номинальный вращающий момент на валу Т1= 0,2 Нм) установлен на литом
кронштейне 1 (рис.5), закрепленном на основании 21. Статор электродвигателя соединен с рамкой 6, которая может вращаться относительно кронштейна 1. Один ко-
нец ротора электродвигателя через муфту связан с входным валом исследуемого редуктора 7. Другой конец ротора соединен с валом тахометра 2, предназначенного для определения частоты вращения вала электродвигателя.
Для контроля за нагрузочным моментом, развиваемым валом электродвигате-
ля, предусмотрено измерительное устройство, состоящее из плоской пружины 3 и
индикатора часового типа 5. Индикатор, закрепленный на кронштейне 1, своим што-
ком 4 упирается в пружину.
При работающем электродвигателе под действием реактивного момента (рав-
ного значению вращающего момента на валу электродвигателя) статор поворачива-
ется и своим рычагом деформирует плоскую пружину 3. Деформация пружины, оп-
ределяемая по индикатору, соответствует вращающему моменту, развиваемому
электродвигателем. Для уменьшения колебаний стрелки на шток индикатора наса-
жен наконечник из резины.
Нагрузочное устройство выполнено в виде магнитной порошковой муфты, слу-
жащей для создания тормозного момента на выходном валу редуктора. Нагрузочное устройство 9 смонтировано на литом кронштейне 11, закрепленном на основании 21.
Статор нагрузочного устройства представляет собой электромагнит, в магнит-
ный зазор которого помещен металлический полый цилиндр с валиком (ротор на-
грузочного устройства). Ротор посредством соединительной муфты связан с выходным валом редуктора. Статор, установленный в двух шарикоподшипниках в кронштейне 11, может свободно вращаться вокруг общей оси с ротором. Внутренняя полость нагрузочного устройства заполнена смесью, состоящей из порошка карбонильного железа и минерального масла. На кронштейне 11 установлено измери-
тельное устройство, состоящее из плоской пружины и индикатора часового типа 10,
упирающегося своим штоком в пружину.
При подаче тока в обмотку электромагнита изменяется вязкость смеси в зазоре между статором и цилиндром ротора. При этом создается тормозной момент на ведомом валу редуктора. Под воздействием этого момента поворачивается статор и своим рычагом деформирует плоскую пружину. Деформация пружины, определяемая по индикатору, соответствует тормозному (нагрузочному) моменту на ведомом валу редуктора.
Значения вращающего момента, развиваемого валом электродвигателя, и тор-
мозного момента могут быть записаны на осциллографе. Для этого на плоские пружины измерительных устройств с обеих сторон наклеены проволочные тензодатчики, концы которых соединены с клеммами, находящимися на задней панели.
Планетарный зубчатый редуктор состоит (см. рис.3) из ведущего вала, жестко связанного с центральным зубчатым колесом 1, двух сателлитов, каждый из которых имеет зубчатые колеса 2’ и 2, неподвижного колеса 3 и водила Н. Число зубьев ко-
лес: Z1=17, Z’2=87, Z3=87, Z2=17. Передаточное отношение редуктора u1(3n) = −25,22 . Редуктор имеет (см. рис. 5) съемную крышку 8, выполненную из ор-
ганического стекла.
На передней части основания 21 установки расположена панель управления, на которой размещены: тумблер 20 для включения электродвигателя, рукоятка потенциометра 19, позволяющая плавно регулировать скорость вращения электродвигателя, контрольная лампочка 18, сигнализирующая о подаче тока на электродвига-
тель, тумблер 15 для включения нагрузочного устройства, рукоятка потенциометра
14 для регулировки нагрузочного момента.
Блок питания состоит из выпрямителя и трансформатора. С помощью вилок и
17
кабелей блок питания подключается к сети (220 В, 50 Гц) и к лабораторной установ-
ке. От блока питания постоянный ток напряжением 110 В подается на установку при
включенном тумблере.
Измерительные устройства для определения по шкалам индикаторов вращаю-
щего момента на валу электродвигателя и нагрузочного момента необходимо про-
тарировать. Для тарировки измерительного устройства электродвигателя использу-
ется рычаг 17 длиной l1 = 21 см и груз 12 массой 0,1 кг, для тарировки измерительно-
го устройства тормоза - рычаг 16 длиной l2 = 24 см и груз 13 массой 1 кг. При тарировке измерительных устройств рычаги закрепляются в отверстиях статоров элек-
тродвигателя и тормозной муфты и на рычагах устанавливаются грузы. Задавая оп-
ределенные значения момента, т.е. меняя длину плеча и снимая показания индика-
тора для каждого положения груза на рычаге, можно получить данные для построе-
ния тарировочной характеристики (т.е. графика зависимости числа делений индикатора, а от момента Т).
IV. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1.Ознакомиться с техническими данными, конструкцией и работой установки.
2.Протарировать измерительное устройство для контроля момента, развиваемого электродвигателем. Тарировка выполняется на неработающей установке. Для этого необходимо:
– установить рычаг 17 (l1 = 21 см) в отверстие на статоре электродвигателя;
– установить груз 12 (F1 = 1 H) на рычаг, совместив торцевую плоскость груза с нулевой риской рычага;
– поворотом шкалы индикатора 5 совместить нулевое деление шкалы со стрел-
кой;
– передвигая груз по рычагу последовательно от риски к риске, записать пока-
зания по индикатору и соответствующие им моменты;
– по полученным данным построить тарировочную характеристику.
3.В такой же последовательности следует Протарировать измерительное уст-
ройство нагрузочного тормоза. В этом случае следует брать рычаг 16 (l2 = 24 см) и
груз 13 (F1 = 10 H). После тарировки груз и рычаг снять.
Перед включением и выключением электродвигателя рукоятку потенциометра
нагрузки повернуть против часовой стрелки (снять нагрузку).
4.Выполнить измерения на работающей установке при следующих условиях:
а) n =1050 об/мин; Т2 =0,5 Нм; Т2 = 0,8 Нм; Т2 = 1 Нм;
б) Т2 = 0,8 Нм; n = 1050 об/мин; n = 1100 об/мин;п = 1150 об/мин; п = 1200
об/мин.
Для этого необходимо:
–поставить тумблеры включения установки и нагрузки в положение «Вкл.»;
–при снятой нагрузке (рукоятка потенциометра повернута против часовой
стрелки) совместить нулевые деления шкал индикаторов со стрелками;
–рукояткой нагрузки создать необходимый момент Т2;
–вращая рукоятку потенциометра 19, установить необходимую частоту вращения вала электродвигателя;
–определить по индикатору и записать величину момента Т1, развиваемого электродвигателем.
5.На основании полученных при выполнении п. 4, данных определить η1H no
фор- / муле(1).
6.По полученным результатам построить графики зависимости КПД редуктора
отнагрузки η=F(T2) от частоты вращения вала двигателя η=f(n). 8. На основе полу-
18
ченных результатов и построенных графиков сделать выводы.
V. СОДЕРЖАНИЕ ОТЧЕТА
1.Наименование работы.
2.Изображение схем (см. рис.3 и рис.4).
3.Основные расчетные формулы.
4.Тарировочные характеристики.
5.Условия проведения экспериментов и результаты измерений.
6.Вычисления значений КПД при n = сопst и Т2 =сопst.
7.Графики функций η = F(Т2) и η = f(n).
8.Выводы по результатам работы.
Литература: [I], с. 173... 176, или [2], с. 277...283.
19