


Работа 6. ИССЛЕДОВАНИЕ СВОБОДНЫХ ЗАТУХАЮЩИХ КОЛЕБАНИЙ МЕХАНИЧЕСКОЙ СИСТЕМЫ
1. Цель работы
Ознакомление с конструкцией работающих в условиях продольно -поперечного
изгиба подвесок, характером свободных затухающих колебаний и методикой определения их параметров.
II.ОБЩИЕ ПОЛОЖЕНИЯ
Впроцессе эксплуатации механизмы и машины часто подвергаются кратковременным (импульсным) нагрузкам, после воздействия которых они совершают свободные колебания. Затухания происходят из-за наличия диссипативных сил, кото-
рые определяют потери энергии в системе и обусловлены трением в сочленениях
конструкций, «внутренним трением» в материале и трением системы при движении в
окружающей среде. Диссипативные силы могут быть линейными и нелинейными. Системы с линейными диссипативными силами, пропорциональными скорости перемещения объекта, называют обычно системой с «вязким трением». Модель такой
системы представлена на рис. 9. Такая система включает в себя груз с массой m,
колеблющийся на упругом элементе, с коэффициентом жесткости k, и демпфер,
создающий сопротивление движению груза с коэффициентом сопротивления β. Ес-
ли груз перемещается по направлению, например, оси z, то его положение полно-
стью определяется единственной координатой. Такая система называется упругой системой с одной степенью свободы. Дифференциальное уравнение движения системы имеет вид:
mz +βz + kz = 0 , |
(1) |
Разделив все слагаемые на т, получим: |
|
z + 2δz +ω02z = 0 , |
(2) |
/где 2δ = β/ m; ω02 = k / m . Здесь δ – параметр, пропорциональный коэффици-
енту демпфирования, ω0 – круговая частота собственных колебаний системы. В
выражении (1) mz – сила инерции груза; βz – сила сопротивления; kz – сила упру-
гости пружины.
В наиболее часто встречающемся случае, когда δ < ωо или β < 2 mk , общее решение уравнения (2) может быть представлено в виде:
mk , общее решение уравнения (2) может быть представлено в виде:
z = Se −δt sin(ω1t + ϕ),
где ω1 |
– частота затухающих колебаний, ω = |
ω2 |
−δ2 , ϕ – начальная фаза. |
|
1 |
0 |
|
Постоянные S и ϕ определяются из начальных условий (при t=0, V0 –начальная скорость и z0 – начальное отклонение):
S = |
1 |
ω2 z2 |
+ (V + δz |
0 |
)2 |
, |
||||
|
||||||||||
|
1 |
0 |
|
0 |
|
|
|
|
||
|
ω1 |
|
|
|
|
|
|
|
|
|
|
|
tgϕ = |
|
ω1z0 |
. |
|
|
|
||
|
|
V |
|
|
|
|
||||
|
|
|
|
+δz |
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
||
|
25 |
|
|
|
|
|
|
|
|
|
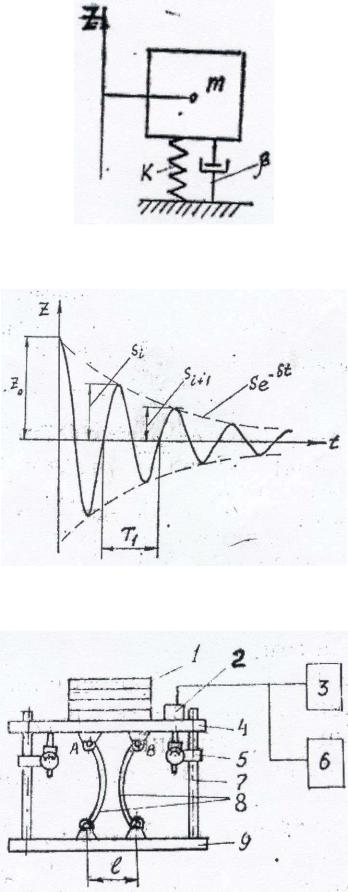
Рис. 9
Рис. 10
Рис. 11
26
В случае S=z0, т.е. когда
V0 |
+ δ z0 = 0, |
z = z |
e−δt cos ω t |
(3) |
|
||||
ω1 |
ω1 |
0 |
1 |
|
|
|
|
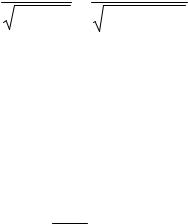
Графическое изображение кривой в соответствии с уравнением (3) представ-
ляет собой «затухающую» косинусоиду, расположенную между кривой z=z0e-δt и ее
зеркальным изображением (рис. 10).
Периодом затухающих колебаний называется интервал времени Т1, в течении
которого точка дважды проходит через среднее положение в одном и том же на-
правлении:
T1 = |
2π |
= |
T |
, |
(4) |
|
ω02 +δ2 |
1−(δ/ ω0 )2 |
|
|
|
где Т1 – период свободных колебаний системы.
Из формулы (4) следует, что при небольшом сопротивлении (когда δ/ω мало)
увеличение периода свободных колебаний за счет сопротивления незначительно. Из приведенного графика следует, что отношение двух отклонений Si и Si+1 со-
ответствует двум моментам времени ti иti+1, отличающимся друг от друга на период Т1. Это отношение отклонений является постоянным и называется декрементом колебания
η = Si+1 = e−δ(2π/ ω1 ) = e−δT
Si
Следовательно, через равные интервалы времени Т1 перемещения точки убывают по закону геометрической прогрессии, т.е. небольшое сопротивление интен-
сивно гасят свободные колебания. Это позволяет при вычислении периода и частоты затухающих колебаний пренебречь силами сопротивления, что значительно облегчает задачу, так как коэффициент δ в большинстве случаев неизвестен.
III. ОПИСАНИЕ ЛАБОРАТОРНОЙ УСТАНОВКИ
Лабораторная установка состоит (рис.11) из двух плит 4 и 9 с размещенными
между ними четырьмя спаренными пружинами прямоугольного поперечного се-
чения 8, эксцентрично закрепленными в кронштейнах А и Б, расстояние l между ко-
торыми может изменяться. Для исключения перекосов плит предусмотрены направ-
ляющие 7. На плите 4 размещаются грузы 1, создающие продольную нагрузку на пружины.
Измерения перемещений плиты 4 производятся индикаторами 5, а виброскорости – вибропреобразователем (датчиком) 2, сигнал с которого подается на светолучевой осциллограф 3 и записывается на фотобумаге. Сигнал с выхода вибро-
преобразователя может непосредственно подаваться в блок обработки информации 6, состоящий из аналоге - цифрового преобразователя, к ЭЦВМ, работающей по соответствующей программе.
27
IV. ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1.Убедиться, что переключатель напряжения на панели блока питания нахо-
диться в соответствующем положении.
2.Включить блок питания в сеть, включить тумблер осциллографа «Питание».
3.Включить термостатирующее устройство.
4.Установить кнопочным переключателем требуемую скорость перемещения фотоэлементы.
5.Включить двигатель привода переключателем «Двигатель».
6.Включить тумблер «Отметчик».
7.Ударным воздействием создать свободные колебания верхней плиты 1, од-
новременно с ударом нажать ручку переключателя «Съемка» в направлении кратко-
временной съемки.
8.Повторить процедуру записи при последовательном снятии калиброванных
грузов.
9.После окончания съемки снять кассету, предварительно оттянув фиксатор —
защелку на кассете.
10.Проявить осциллограмму рассеянным дневным или искусственным светом.
11.Обработать проявленную осциллограмму.
Учитывая масштаб (скорость протяжки), определить период Ti затухающих колебаний.
Определить величину двух отклонений Si и Si+1 и их отношение. Вычислить декремент колебания η.
Определить время полного затухания колебаний.
Определить коэффициент жесткости подвески при различной величине стати-
ческой нагрузки (K=F / zст).
Построить график зависимости коэффициента k от статической нагрузки F.
12. Оценить влияние нелинейности упругих характеристик пружин на характер
свободных колебаний.
V. СОДЕРЖАНИЕ ОТЧЕТА
1.Наименование работы.
2.Изображение модели и графика (см. рис.9 и 10).
3.Основные расчетные формулы и вычисления по формулам.
4.Данные измерений.
5.График зависимости коэффициента k от статической нагрузки.
6.Выводы по результатам выполненной работы.
Литература: [I], с. 333...342.
28