

Переменные с выходов шифратора  ,
,  ,
,  ,
,  пронумерованы и объединены в одну шину, тогда необходимый сигнал можно взять в любой точке шины. Аналогичным образом пронумерованы и объединены в одну шину выходы триггеров
пронумерованы и объединены в одну шину, тогда необходимый сигнал можно взять в любой точке шины. Аналогичным образом пронумерованы и объединены в одну шину выходы триггеров  ,
,  ,
,  ,
,  ,
,  ,
,  , которые рассматриваются как сигналы обратной связи и являются выходными для комбинационных схем. При построении дешифратора в одну шину объединены выходные сигналы автомата
, которые рассматриваются как сигналы обратной связи и являются выходными для комбинационных схем. При построении дешифратора в одну шину объединены выходные сигналы автомата
 ,
,  ,
,  ,
,  ,
,  ,
,  .
.
ТЕМА 6. ОСНОВНЫЕ СВЕДЕНИЯ О СИГНАЛАХ
ИИХ МАТЕМАТИЧЕСКИХ МОДЕЛЯХ
6.1.Временное представление сигналов. Классификация сигналов
Сигнал – это физический процесс, распространяющийся во времени и в пространстве, который несёт в себе некоторую информацию и предназначен для управления элементами различного рода систем.
Количество информации, которое может передать сигнал, зависит от параметров сигнала (длительность, мощность, полоса частот и т. д.). Разновидностей реальных сигналов много, однако большинство из них описывается небольшим числом математических моделей.
Сигналы могут быть непрерывными и дискретными, детерминированными и случайными, периодическими и непериодическими. Будем рассматривать сигналы как некоторую функцию времени f (t) , где t ÎT , f Î F.
В непрерывных сигналах множества T и F представляют собой несчётные множества точек ограниченного интервала. (Множество называется счётным, если его элементы пронумерованы натуральными числами).
Рассмотрим шесть простейших непрерывных сигналов, которые чаще всего встречаются в системах, их называют также типовыми воздействиями.
1. Единичное ступенчатое воздействие или скачок по положению (рис. 6.1).
|
1(t) |
= |
1 |
t
Рис. 6.1
Такой сигнал может отражать резкое(мгновенное) изменение внешнего воздействия на систему(например, включение электрической энергии, увеличение момента сопротивления на валу двигателя и т. п.).
При анализе систем управления широко используется преобразование Лапласа. Поэтому для всех временных сигналов f (t) будем приводить так-
91
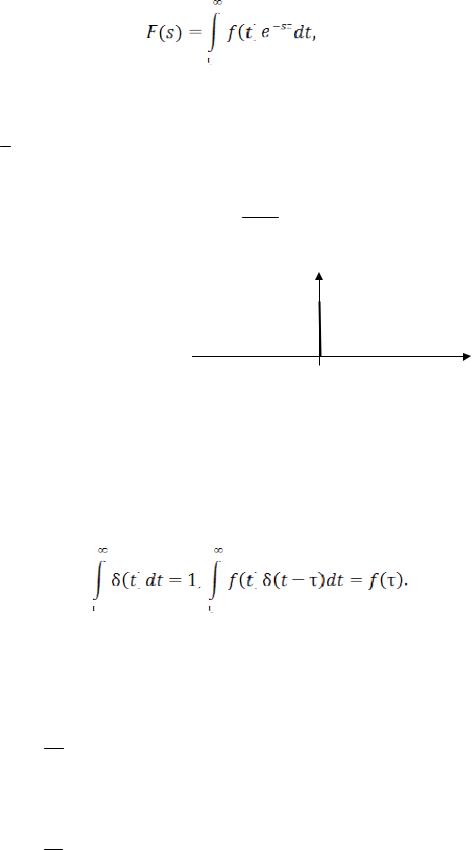
же изображение по Лапласу F (s) , которое вычисляется в соответствии с выражением
где s – оператор Лапласа, произвольная комплексная величина. |
|
||||
Изображение |
по |
Лапласу |
единичного |
ступенчатого |
воздействия |
L ={1(t) }= 1s .
δ-функция или единичный импульс, соответствующий производной еди-
ничного ступенчатого воздействия d(t) = d1(t) dt
d(t)
ì¥, t = 0, d(t) = í
î0, t ¹ 0.
0 |
t |
Рис. 6.2
Это импульс бесконечно большой амплитуды и бесконечно малой длительности. Изображение по Лапласу L{d(t)} =1.
δ-функция обладает следующими свойствами:
Последнее соотношение характеризует фильтрующее свойство δ-функции. 3. Сигнал, изменяющийся с постоянной скоростью(с постоянной первой производной), соответствующий линейному изменению функции f (t) во
времени f (t) = A ×t , где A = const (рис. 6.3). Изображение по Лапласу
A L{ f (t)} = F (s) = s2 .
4. Сигнал, изменяющийся с постоянным ускорением(с постоянной второй производной), f (t) = B ×t 2 , где B = const (рис. 6.4). Изображение по Лапласу
B L{ f (t)} = F (s) = s3 .
92
f (t) |
f (t) |
A |
|
B |
|
|
|
|
|
|
1 |
t |
1 |
|
|
|
|
t |
|
|
|
|
|
|
|
|
||
Рис. 6.3 |
|
Рис. 6.4 |
|
|
|
|||
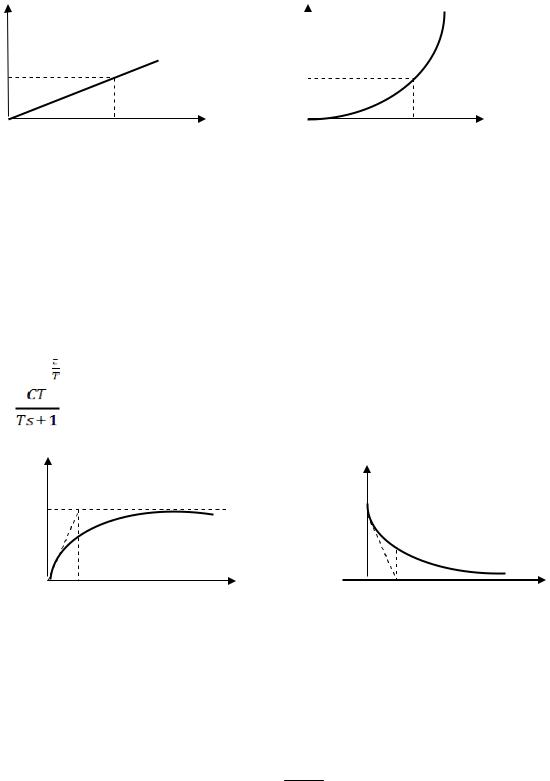
5. Экспоненциально растущий или убывающий сигнал. Экспоненциально |
||||||||
|
|
|
- |
t |
|
|
|
|
|
|
|
|
и приведён на |
||||
растущий сигнал описывается выражением f (t) = C(1 - e T ) |
||||||||
|
|
1 |
|
C |
|
|
|
|
рис. 6.5, а. Его изображение по Лапласу имеет вид F1(s) = |
|
|
. |
|
||||
|
|
|
|
|
||||
|
|
|
s(Ts +1) |
|
||||
Экспоненциально |
убывающий |
сигнал |
описывается |
выражением |
||||

 = C
= C

 (s) =
(s) =
f1(t)
C
и приведён на рис. 6.5, б. Его изображение по Лапласу имеет вид
.
f2 (t)
C
T |
t |
T |
t |
б
а
Рис. 6.5
В справочной литературе приводятся таблицы соответствия между временными функциями и их изображениями по Лапласу, так функция 
 =
= 

 имеет изображение
имеет изображение
F (s) = 1 . s + a
6. Гармонический сигнал, соответствующий изменению по незатухающей синусоиде или косинусоиде. Аналитическое выражение и преобразование Лапласа для соответствующих функций имеет вид
f1 |
(t) = D sin wt; F1(s) = |
|
wD |
; |
f2 (t) = D coswt; F2 (s) = |
|
DS |
. |
|
s2 |
+ w2 |
s2 |
+ w2 |
||||||
|
|
|
|
|
93
С помощью простейших сигналов можно аппроксимировать большинство встречающихся на практике сигналов путём разложения их в ряд или используя суперпозицию простейших сигналов. Найти реакцию системы на типовое воздействие значительно проще, чем на реальный сигнал.
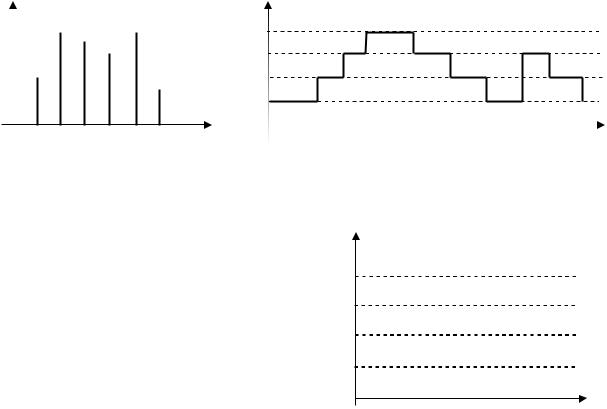
В дискретных сигналах одно из множеств F и T или оба этих множества являются счётными.
Сигналы, квантованные по времени, задаются в дискретные моменты времени t (множество T-счётно). Величина сигнала в этих точках может принимать любое значение в определённом интервале по оси ординат(рис. 6.6, а). Такие сигналы называют импульсными.
Сигналы, квантованные по уровню, задаются на всей временной оси,
однако |
величина |
сигнала |
может принимать |
лишь дискретные значения |
(рис. 6.6, |
б). Здесь |
множество |
-счётно, а множество |
-несчётное множество |
|
|
|
Квантование по уровню используют при пред- |
|
точек ограниченного интервала.F |
T |
|||
ставлении сигналов в цифровой форме с помощью цифрового кодирования, когда уровни нумеруются числами с конечным числом разрядов.
f (t) f (t)
|
t |
|
|
|
|
|
|
|
t |
|
а |
Рис. 6.6 |
|
|
б |
||||
|
|
|
|
|
|
|
|
||
Сигналы, |
квантованные |
по вре- |
f (t) |
|
|
|
|
|
|
мени и по уровню, называются цифро- |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|||
выми (рис. 6.7). Здесь множества F и T- |
|
|
|
|
|
|
|
||
счётны. Цифровое представление сиг- |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
налов широко применяется и позволяет |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
использовать |
достижения |
микроэлек- |
|
|
|
|
|
|
|
троники. |
|
|
|
|
|
|
|
|
|
Кроме приведённой классифика- |
|
|
|
|
|
|
|
||
ции, являющейся наиболее общей, сиг- |
|
|
|
|
|
|
t |
||
налы делятся на детерминированные и |
|
|
|
|
|
|
|||
случайные, периодические и не перио- |
|
|
Рис. 6.7 |
||||||
дические и т. п. |
|
|
|
|
|
|
|
|
|
Детерминированным называют любой сигнал, мгновенное значение которого в произвольный момент времени можно предсказать с вероятностью1. Такие сигналы могут быть заданы аналитически или другим эквивалентным способом, например, таблично или графически.
94