


Рисунок 26 – Диагональное расположение ячеек
Однако при регулярном расположении одинаковых ячеек образуются паразитные текстуры, муар, лишние контуры. Поэтому наряду с ячейками с фиксированным рисунком используются методычастотно – модулированного дизеринга (равномерное псевдослучайное распределение пикселей по ячейке) и диффузного дизеринга (распределение в каждой ячейке создаётся случайным образом).
4.3. Алгоритмические основы растровой графики
4.3.1. Поиск оптимального алгоритма рисования прямой
Пусть отрезок прямой задан в плоскости координатами начала(x1 , y1 ) и
конца (x2 , y2 ) (см. рисунок 27).
Рисунок 27 – Отрезок прямой
Для вывода линии необходимо закрасить в определённый цвет все пиксели вдоль неё (считаем, что линия бесконечно тонкая). Из отношения катетов для подобных треугольников:
x - x1 |
= |
x2 |
- x1 |
(8) |
|
y - y1 |
y2 |
- y1 |
|||
|
|
Можно выразить текущие координаты x или y .
59
Пусть здесь и далее угол наклона прямой к осиx меньше или равен 45°. При этом можно запустить инкрементный цикл по оси x , и прямая останется 8- связной (т.е. не появятся так называемые «выпадающие пиксели»). Если же тангенс угла наклона больше1, то наоборот, осуществляется цикл с единичным приращением по оси y . Крайние случаи, когда линии являются вертикальными или горизонтальными, не рассматриваем, так как практически любой из алгоритмов их рисования достаточно быстр.
1. Рассмотрим реализацию алгоритма рисования отрезка«из первых принципов»:
for (x=x1; x<=x2; x++)
{
y=y1+((x-x1)*(y2-y1))/(x2-x1); SetPixel(x,y);
}
Недостаток алгоритма: внутри цикла выполняется много операций, в том числе умножение и деление. При большом количестве выводимых линий это существенно скажется на скорости графического вывода.
2. Вынесем постоянные величины за цикл, что уменьшит количество действий в цикле, но в то же время потребует явного преобразования типов:
float k = (float) (y2-y1) / (float) (x2-x1); for (x=x1; x<=x2; x++)
{
y=y1+ (float) (x-x1) * k; SetPixel(x,y);
}
Так как
y = y1 + (x - x1 ) × k = y1 + xk - x1k = xk + yy , |
(9) |
где yy – константа, то перепишем программу следующим образом:
float k = (float) (y2-y1) / (float) (x2-x1); float yy=(float) y1 – (float) x1*k
60
for (x=x1; x<=x2; x++)
{
y=yy+(float) x*k; SetPixel(x,y);
}
В итеративном процессе при постоянном шаге поx равном xi+1 - xi |
=1 в |
соответствии с (9) разность |
|
yi+1 - yi = y1 + xi+1k - x1 × k - y1 - xi k + x1k = (xi+1 - x)k = k |
(10) |
Тогда:
float k = (float) (y2-y1) / (float) (x2-x1);
//работаем с вещественными числами float yy = y1;
for (x=x1; x<=x2; x++)
{
yy += k; y = yy
//в цикле осталась только операция сложения
SetPixel(x,y);
}
Недостаток представленного алгоритма в том, что в случае целочислен-
ных значений исходных координат вычисление путём добавления вещественных приращений может привести к накоплению ошибки вычислений координат (т.е. y ¹ y2 на последнем шаге).
4.3.2. Инкрементный алгоритм Брезенхема (Bresenham) для прямой
Инкрементный – т.е. последовательно вычисляются координаты соседних пикселей путём добавления приращений координат. Основной целью для разработки таких алгоритмов было построение циклов вычисления координат на основе только целочисленных операций сложения/вычитания без использования умножения и деления(т.к. вплоть до недавнего времени процессоры выполняли целочисленные операции гораздо быстрее, чем операции с плавающей точкой).
В 1965 году Брезенхемом предложен алгоритм растрового построения отрезка. В алгоритме используется управляющая переменная d1 , которая на каж-
61
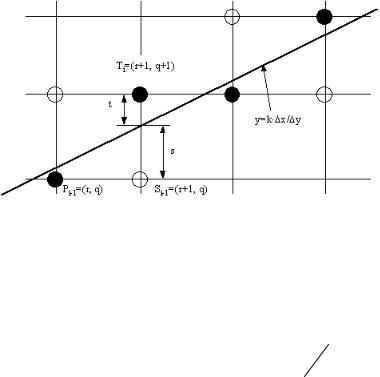
дом шаге пропорциональна разности между s и t (см. рисунок 28). На рисунке приведен i –ый шаг, когда пиксель Pi-1 уже найден как ближайший к реальному изображаемому отрезку, и теперь требуется определить, какой из пикселей должен быть установлен следующим: Ti или Si .
Если s < t , то Si ближе к отрезку и необходимо выбрать его; в противном случае ближе будет Ti . Другими словами, если s - t < 0 , то выбирается Si ; в
противном случае выбирается Ti .
Рисунок 28 –
Изображаемый отрезок проводится из точки(x1 , y1 ) в точку (x2 , y2 ) .
Пусть первая точка находится ближе к началу координат, тогда перенесем её в
начало координат, и тогда конечная точка окажется в(Dx, Dy) , |
где Dx = x2 - x1 , |
|||||||||
Dy = y |
|
- y . Уравнение прямой теперь имеет вид y = x × Dy |
. |
|
||||||
|
2 |
1 |
|
|
|
|
|
Dx |
|
|
|
|
|
|
|
|
|
|
|
||
|
Из рисунка следует, что |
|
|
|
|
|
|
|
|
|
|
|
s = |
Dy |
(r +1) - q, |
t = q +1 - |
Dy |
(r +1) , |
(11) |
||
|
|
|
|
|||||||
|
|
|
Dx |
|
Dx |
|
|
|||
поэтому |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s - t = 2 |
Dy |
(r +1) - 2q -1 |
|
(12) |
||
|
|
|
|
Dx |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
умножим на Dx : |
|
|
|
|
|
|
|
|
||
|
|
Dx(s - t) = 2(Dy ×r - q ×Dx) + 2Dy - Dx , |
(13) |
|||||||
так как Dx > 0 , величину Dx(s - t) можно использовать в качестве критерия для
62
выбора пикселя. Обозначим эту величину di : |
|
|
|||
|
di = 2(Dy × r - q × Dx) + 2Dy - Dx, |
(14) |
|||
так как r = xi-1 , q = yi-1 (предыдущий шаг итерации), получаем: |
|
||||
di |
= 2(Dy × xi-1 - yi-1 × Dx) + 2Dy - Dx, |
(15) |
|||
а на текущем шаге итерации: |
|
|
|
|
|
|
di-1 = 2(Dy × xi - yi |
× Dx) + 2Dy - Dx. |
(16) |
||
Введём величину Di следующим образом: |
|
||||
|
Di = di+1 - di |
= 2Dy(xi |
- xi-1 ) - 2Dx( yi - yi-1 ). |
(17) |
|
Вспомним, что |
xi - xi-1 =1. |
Если |
di |
³ 0 , то выбираем Ti , |
тогда |
Di = 2(Dy - Dx). . |
|
|
|
|
|
Если di < 0 , то выбираем Si , тогда Di = 2Dy.
Таким образом, получена итеративная формула для вычисления критерия di . Начальное значение d1 = 2Dy - Dx.
Можно построить блок-схему алгоритма (см. рисунок 29).
Этот алгоритм пригоден для случая 0 £ Dy £ Dx. Для других случаев алго-
ритм строится сходным образом.
В алгоритме используются только целые числа, сложение, вычитание и
сдвиг.
63
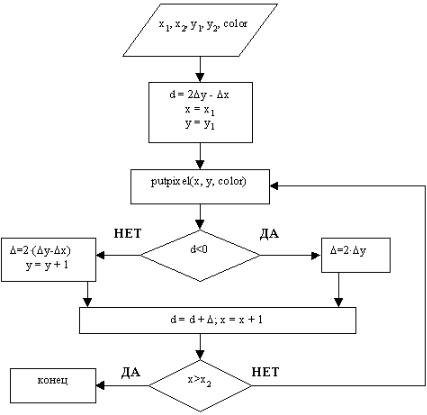
Рисунок 29 – Блок-схема алгоритма
Пример программы, реализующей этот алгоритм: int dx = x2 - x1;
int dy = y2 - y1; int d = 2 * dy - dx; int d1 = 2*dy;
int d2 = 2*(dy - dx); SetPixel(x1, y1, color);
// Первая точка отрезка
for (int x = x1 + 1; int y = y1; x <= x2; x++) { if (d < 0) {
d += d1; } else { d += d2; y += 1;
}
SetPixel( x, y, color);
// Очередная точка отрезка
}
64