ПРОЕКТИРОВАНИЕ РЕЛАКСАЦИОННЫХ УСТРОЙСТВ И ФОРМИРОВАТЕЛЕЙ ИМПУЛЬСОВ
Глава 21
РЕЛАКСАЦИОННЫЕ УСТРОЙСТВА НА ИНТЕГРАЛЬНЫХ МИКРОСХЕМАХ
21.1.Назначение, режимы работы
иосновные параметры релаксационных устройств
Релаксационные интегральные микросхемы так же, как и их дискретные аналоги, предназначены для генерирования и формирования импульсных сигналов с заданными характеристиками, определяемыми параметрами схемы. Релаксационные устройства наиболее часто применяются для генерирования и формирования прямоугольных импульсов и импульсов линейно-изменяющейся формы.
Релаксационные устройства работают в двух режимах: автоколебательном и ждущем. В автоколебательном режиме они генерируют непрерывную последовательность импульсов, а в ждущем на каждый входной сигнал произвольной формы формируется один стандартный импульс или пачка таких импульсов.
Релаксационные устройства, работающие в автоколебательном режиме, применяются в качестве задающих генераторов и делителей частоты. Ждущий режим работы используется для формирования импульсов с определенными параметрами с целью стандартизации их формы, длительности, а также для усиления их мощности и т. д.
778
Часть 5. Проектирование релаксационных устройств
В интегральном исполнении выпускаются релаксационные интегральные микросхемы (ИМС) с времязадающими RС- цепями: мультивибраторы и одновибраторы (ждущий мультивибратор). Они изготавливаются в виде монолитных и гибридных ИМС, работающих в предельном режиме, т.е. с наименьшим периодом колебаний или временем выдержки. Для работы с большим периодом колебаний или временем выдержки обычно предусматриваются дополнительные выводы для подключения к ИМС навесных конденсаторов.
Широкое распространение получили релаксационные устройства, построенные на основе ИОУ и интегральных компараторов напряжений (ИКН). В таких устройствах ИОУ или ИКН охватывается регенеративной обратной связью при помощи RС- цепей, обеспечивающих релаксационный процесс. В настоящее время для этой цели применяются также интегральные таймеры [1]. Релаксационные устройства строятся также на логических ИМС.
Характеристики релаксационных устройств можно разбить на две группы: характеристики установившихся процессов и характеристики процессов опрокидывания схемы.
К первой группе относятся:
амплитуда выходного сигнала Uвыхт;
частота F или период Т следования импульсов F = T1 при
работе в автоколебательном режиме и длительность импульса tи и наибольшее допустимое значение времени восстановления
Твосст.наиб для заторможенной схемы; значения F, Т и tи могут регулироваться в определенных пределах;
скважность генерируемых импульсов, определяемая соотношением между длительностями импульса tи и паузы tп между
двумя последовательными сигналами Qс = tи + tп ; tи
нестабильность параметров генерируемой последовательности импульсов (в первую очередь частоты, скважности, длительности и амплитуды) при изменении параметров элементов схемы в определенных пределах; обычно задается относительная
нестабильность, например: δ
Т
=
Т
, δ
tи
=
tи
, хотя может быть
Т
tи
Глава 21. Релаксационные устройства на интегральных микросхемах 779
задана и абсолютная величина допустимого отклонения соответствующего параметра;
нагрузочная способность.
Вторая группа включает характеристики переходных процессов в схеме, в первую очередь, длительности фронта tфр и среза tср импульса.
В настоящее время известны более двухсот разновидностей релаксационных устройств. Помимо классических схем мультивибраторов и одновибраторов на транзисторах, тиристорах, туннельных диодах и других дискретных элементах, на практике широко применяются релаксационные устройства, построенные на цифровых ИМС, ИОУ, ИКН и таймерах.
Столь большое число разновидностей релаксационных устройств создает определенные затруднения при их выборе. Возникают проблемы и при проектировании и разработке электронных блоков, содержащих релаксационные устройства. Очевидно, что эти затруднения можно исключить, разработав на основе общей теории релаксационных устройств обобщенную методику их проектирования.
Одно из основных положений теории связано с выводами соотношения, установившего связь между параметрами схемы релаксационного устройства и длительностью генерируемого (в автоколебательном режиме) или формируемого (в ждущем режиме) импульса. Это соотношение можно получить в самом общем виде на основании следующих представлений.
Релаксаторы – это электронные устройства на усилительных элементах, охваченных регенеративной обратной связью. При действии регенеративной обратной связи состояние равновесия устройства оказывается неустойчивым и сопровождается лавинообразным изменением напряжений и токов до тех пор, пока не размыкается петля обратной связи из-за запирания или насыщения усилительных элементов в цепи обратной связи. После прекращения действия регенеративной обратной связи состояние системы стало бы устойчивым (как, например, в триггерах), од-
780
Часть 5. Проектирование релаксационных устройств
нако для релаксации необходимо обеспечить возврат устройства в состояние неустойчивого равновесия. Для этой цели в релаксационных устройствах применяют времязадающие цепи на основе реактивных элементов, под действием которых происходят изменения напряжений, токов и после прекращения регенерации. Таким способом состояния устойчивого равновесия, которые могли бы наступать после прекращения действия регенеративной обратной связи, превращают в состояние временно-устойчивого равновесия, тем самым обеспечивая работу устройства в режиме релаксации, т.е. в режиме генерации или формирования разрывных колебаний.
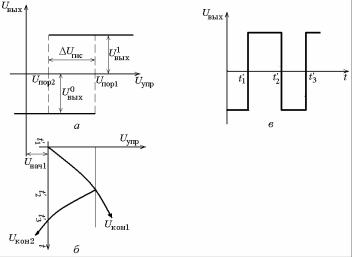
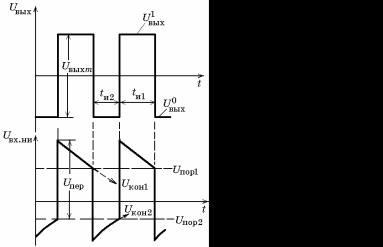
На рис. 5.1 показана переключательная характеристика устройства с регенеративной обратной связью. Эта характеристика имеет вид гистерезисной кривой с шириной петли гистерезиса
Uгис = Uпор1 – Uпор2, где Uпор1 и Uпор2 – пороговые напряжения, при достижении которых в устройстве возобновляется действие
регенеративной обратной связи (на рис. 5.1 участки регенеративной обратной связи показаны штриховыми линиями).
Рис. 5.1. Переключательная характеристика релаксатора (а) и эпюры, иллюстрирующие изменение его управляющего (б) и выходного (в) напряжений
Для наглядности последующие уравнения, на основании которых определяют основные параметры релаксатора, составлены в достаточно общем виде на примере схемы релаксатора на ИОУ, показанной на рис. 5.2, а.
Глава 21. Релаксационные устройства на интегральных микросхемах 781
а
Рис. 5.2. Схема релаксатора на ИОУ или ИКН с интегрирующей RC-цепью (а) и эпюры напряжений на выходе Uвых и инвертирующем
входе Uвх.и, иллюстрирующие работу б релаксатора (б)
В релаксаторах наиболее часто в качестве хронирующего элемента, определяющего период колебаний или время выдержки, используют интегрирующие или дифференцирующие цепи. В схеме на рис. 5.2, а релаксатор построен на ИОУ, охваченном
регенеративной обратной связью через делитель R1–R2
Так как релаксатор охвачен глубокой регенеративной обратной связью, то при появлении случайных отклонений напряжения или тока будет происходить его непрерывное изменение до тех пор, пока из-за запирания или насыщения транзисторов выходное напряжение перестанет изменяться. Так, при случайном увеличении Uвых его нарастание будет продолжаться до тех пор, пока оно
не ограничится на уровне Uвых1 (из-за насыщения или запирания транзисторов). При этом на неинвертирующем входе будет дей-
ствовать напряжение Uвх.ни = γиUвых1 .
Напряжение на инвертирующем входе, равное напряжению Uс на конденсаторе С, можно представить в виде
−
t
(21.1)
Uупр(t) ≡ Uвх.и = Uкон1 + (Uнач1 – Uкон1) е τ ,
782
Часть 5. Проектирование релаксационных устройств
где Uнач1 = Uпор2 – начальное значение управляющего напряжения Uупр = Uвх.и, формируемого времязадающей RC-цепью с постоянной времени τ = RС, при помощи которого обеспечивают изменение Uупр по экспоненциальному закону (21.1).
По мере заряда конденсатора напряжение на инвертирующем входе постепенно нарастает, стремясь к уровню Uкон1 =Uвых1 ,
который определяется выходным напряжением ИМС в одном из временно устойчивых состояний. Когда разность потенциалов между входами ИОУ или ИКН становится почти равной нулю, ИМС выходит из режима ограничения и начинается спад выходного напряжения (из-за нарастания напряжения на инвертирующем входе). Таким образом, при достижении Uвх.и порогового
уровня Uпор1 = Uвх.ни ≈ γu Uвых1 заканчивается первый цикл работы
релаксатора, который завершается формированием импульса длительностью
tи1 = τln Uкон1 −Uнач1Uкон1 −Uпор1
.
После первого цикла в релаксаторе возобновляется регенеративный процесс, способствующий непрерывному спаду вы-
ходного напряжения до уровня Uвых0 , когда из-за перехода ИМС в
режим ограничения Uвых фиксируется, поэтому перестает спадать Uвх.ни, релаксатор переходит во второе временно устойчивое состояние, характеризуемое соотношениями
Uвх.ни = γu Uвых0 ;
− t
Uвх.и(t) = Uкон2 + (Uнач2 – Uкон2) е τ .
Когда Uвх.и становится равным Uпор2 = γu Uвых0 , заканчивается второй цикл работы релаксатора, продолжительность которого
tи2 = τln Uнач2 −Uкон2 .Uпор2 −Uкон2
Период колебаний Т = tи1 + tи2.
Таким образом, длительность генерируемого или формируемого импульса tи определяется из уравнения Uупр(tи) = Uпор, и ее можно рассчитать [1] по формуле
Глава 21. Релаксационные устройства на интегральных микросхемах 783
U
кон
−U
нач
tи = τln
.
(21.2)
Uкон
−Uпор
Вывод этой формулы в предложенном виде позволяет выяснить физический смысл величин, определяющих длительность импульса tи, поэтому она легко запоминается, а в случае необходимости без особого труда выводится на основании выражения (21.1). Немаловажным является и то, что определение величин τ, Uнач, Uкон, Uпор можно проводить на основании электрической схемы замещений. Формулой (21.2) пользуются для расчета постоянной времени τ, обеспечивающей формирование импульса заданной длительности tи.
При проектировании релаксационных устройств, как правило, требуется оценить отклонение длительности импульса tи от заданной величины tи, обусловленное разбросом параметров элементов схемы. Обязательным является также расчет нестабильности tи, вызываемой изменением температуры, напряжений источников питания и т.д. Такие расчеты можно проводить на основании формулы относительного отклонения и изменения длительности импульса
t
и =
τ
+
τ
U
кон
−
U
нач −
Uкон − Uпор
,
(21.3)
U
Uкон −Uпор
tи
τ
tи
кон −Uнач
которая получена из соотношения (21.2). При подстановке в эту формулу значений Δτ, Uкон, Uнач, Uпор, определяемых разбросом параметров, оценивают отклонение tи от расчетной величи-
ны, суммируя разброс всех величин с тем,
чтобы установить
возможное отклонение tи наибольшей величины.
Если требуется рассчитать нестабильность
tи,
то в формулу
(21.3) подставляют с учетом знаков изменения Δτ,
Uкон, Uнач,
Uпор, вызываемые температурным дрейфом параметров схемы и изменением напряжений источников питания.
Формула (21.3) в том или ином виде тоже встречается в литературе. При этом первичные величины (в формуле (21.3) это Uкон, Uнач, Uпор) определяются для каждой схемы в отдельности, с чем связаны трудности, указанные в начале раздела. Разумеется, некоторые факторы, определяющие первичные величины,
784
Часть 5. Проектирование релаксационных устройств
действительно требуют учета соответствующих особенностей данной конкретной схемы. Однако ряд основных факторов может быть учтен в общем виде. Доказательство этого положения приводится далее. Кроме того, будет показана необходимость учета еще одного основного фактора, а именно, отклонения или изменения порогового напряжения Uвх.рег, обусловленного изменением напряжения, при котором возобновляется регенерация. Этот фактор, имеющий для ряда устройств решающее значение, в литературе почему-то не принимается во внимание.
Общим для всех релаксаторов является то, что отклонение порогового напряжения Uпор от номинальной величины и дрейф этого напряжения, прежде всего, определяются разбросом и температурным дрейфом напряжения Uвх.рег, при котором возобновляется регенерация. Строгое определение Uвх.рег возможно только экспериментально на этапе наладки схемы релаксатора. Приближенно Uвх.рег можно оценить исходя из определения напряжения регенерации Uвх.рег: это разность потенциалов на входе сравнивающего устройства, при которой возобновляется регенерация. При этом Uвх.рег по величине практически совпадает с напряжением сдвига Uвх.сд, определяемым как разность потенциалов на входах микросхемы, при котором перепад напряжений на выходе достигает половины своего установившегося значения
Uвых =Uвых1 −Uвых0 . Для ИКН в справочниках приводится как величина Uвх.сд, так и его температурный коэффициент [2]. Для ИОУ указываются напряжение смещения Uвх.см и его температур-
ный коэффициент, разумеется, отличающиеся от Uвх.рег и его температурного коэффициента, однако не так уж существенно, по-
этому справочными данными по этим параметрам можно воспользоваться при проектировании регенеративных устройств на ИОУ.
Помимо указанных параметров микросхем, используемых в качестве сравнивающих устройств в релаксаторах, отклонение напряжения регенерации Uвх.рег, обусловленное разбросом параметров элементов схемы, а также его температурный дрейф Uвх.рег/ Т зависят также от входного тока микросхемы и его температурного дрейфа, определяемых токами смещения Iвх.см и сдвига Iвх.сд.
Глава 21. Релаксационные устройства на интегральных микросхемах 785
Таким образом, отклонение пороговых уровней Uпорi (рассчитанных по номинальным значениям параметров микросхем и элементов схемы) от их действительных значений (отличающихся от расчетных из-за разброса параметров и изменения напряжений питания) можно оценить по известной формуле для отклонения выходного напряжения микросхемы, приведенного ко входу
где Rни; Rин – средние значения сопротивлений элементов в неинвертирующем и инвертирующем входах; Kвл.ип – коэффициент влияния отклонения напряжения от номинальной величины.
При определении Uвх.рег по формуле (21.4) все параметры микросхемы берутся со знаком минус или плюс в зависимости от
знака разности Rни – Rин. Такой подход связан с тем, что Uвх.рег оценивают для определения пределов изменения регулирующего
элемента (переменных резистора или триммера).
При определении дрейфа напряжения регенерации по формуле
U
= (T −T )
Uвх.сд
+
Iвх.сд
(R
− R
) + Iвх
(Rни + Rин)
+
вх.рег.др
н
T
T
ни
ин
T
2
2
Е
+ ∑Kвл.ип
ип
(21.5)
l =1
Т
температурные коэффициенты всех параметров микросхемы, а
также Еип/
Т включаются в формулу (21.5) с учетом их действи-
тельных знаков. В схемах на ИОУ Uвх.сд и Uвх.сд/ Т заменяют
на Uвх.см и
Uвх.см/ Т.
Помимо
рассмотренных параметров релаксатора, при их
проектировании, как правило, требуется определить длительности фронта tфр и среза tср выходного импульса, продолжительности которых устанавливают на основании анализа переходных процессов.
Переходный процесс во время опрокидывания релаксатора можно разбить на три стадии: подготовки, регенерации и восстановления.
786
Часть 5. Проектирование релаксационных устройств
Стадия подготовки начинается с момента, когда один из усилительных элементов в петле обратной связи либо отпирается, либо выходит из насыщения и начинается изменение сигнала в канале обратной связи. Стадия подготовки завершается тогда, когда коэффициент петлевого усиления становится больше единицы и в системе возобновляется регенерация.
На стадии регенерации, которая начинается после стадии подготовки, происходит лавинообразное изменение напряжений и токов до тех пор, пока действие обратной связи не ослабляется из-за подзапирания или насыщения усилительных элементов в петле обратной связи. Когда коэффициент петлевого усиления становится больше единицы, в системе возобновляется регенерация.
На стадии восстановления происходит установление напряжений и токов до уровней, соответствующих их стационарным значениям в области малых времен (при работе в ждущем режиме стадия восстановления в области больших времен связана с установлением стационарных напряжений в хронирующих цепях).
Длительности фронта и среза импульсов в релаксационных устройствах определяются соответствующими параметрами активных и пассивных элементов с учетом действия регенеративной обратной связи по приближенным формулам
t
фр
0,8
Uвыхт
;
t
ср
0,8
Uвыхт
,
(21.6)
λ V 1
λ V 0
v U вых
v U вых
где
U
выхт
=U1
−U 0
–
полная
амплитуда импульсов;
V 1
,
вых
вых
U
вых
V 0
–
максимальная скорость нарастания и спада выходного
U вых
напряжения
микросхемы, обычно указываемые в справочнике;
λv = 0,8–0,6 – эмпирический коэффициент, учитывающий уменьшение скорости нарастания или спада импульса на выходе релак-
сатора по сравнению с максимальной величиной VU1вых или VU0вых ,
измеряемой на выходе микросхемы при ее переключении импульсным перепадом с перенапряжением.
Глава 21. Релаксационные устройства на интегральных микросхемах 787
21.3. Релаксационные устройства на основе интегральных операционных усилителей, компараторов напряжений и таймеров
На основе ИОУ, ИКН и таймеров можно строить релаксационные устройства, обладающие сравнительно высокой стабильностью. ИОУ достаточно полно были представлены в предыдущих главах. Кратко рассмотрим назначение и особенности компараторов [3].
Компаратор – это сравнивающее устройство. Современные интегральные компараторы напряжений (ИКН) предназначены для сравнения двух напряжений, поступающих на его инвертирующий и неинвертирующий входы. При этом в зависимости от знака разности входных напряжений на выходе ИКН устанавливается потенциал, соответствующий либо логической 1, либо ло-
гическому 0. Первый из этих потенциалов – это Uвых1 .икн – высокий потенциал, второй Uвых0 .икн – низкий потенциал.
Структурная схема ИКН совпадает со схемой ИОУ [4]. Она содержит на входе дифференциальный каскад, выполняющий функции сравнивающего устройства. Для повышения чувствительности ИКН за входным дифференциальным каскадом обычно включают промежуточный усилитель с высоким коэффициентом усиления, обеспечивающий формирование перепадов напряжений большой амплитуды при незначительной разности входных напряжений.
Основное отличие ИКН от ИОУ состоит в построении выходного каскада. В ИКН выходной каскад строят так, чтобы можно было совмещать ИКН с цифровыми микросхемами. Для этого необходимо обеспечить работу выходного каскада в ключевом режиме, при котором формируются потенциальные уровни
Uвых1 .икн и Uвых0 .икн , первый из которых соответствует логической единице, а второй – логическому 0. Причем Uвых1 .икн и Uвых0 .икн
должны равняться входным напряжениям соответствующей цифровой микросхемы, под действием которых происходит переключение цифрового устройства.
788
Часть 5. Проектирование релаксационных устройств
Так как ИКН можно представить как нелинейный усилительформирователь, то, прежде всего, он характеризуется параметрами, свойственными усилителям: коэффициентом усиления напряжения при работе в активной области, входным и выходным сопротивлениями. Причем, поскольку речь идет о нелинейном усилителе, его параметры меняются в широких пределах. Так, при работе в активной области, границы которой определяются напряжениями переключения ИКН, коэффициент усиления составляет несколько тысяч, тогда как в состоянии логической 1 и 0 ИКН перестает усиливать.
Погрешность сравнения входных напряжений, определяемую отклонением выходного напряжения и его дрейфом при работе ИКН в активной области, оценивают теми же параметрами, что и ИОУ, т.е. напряжением сдвига (смещения) Uвх.сд; входным током смещения Iвх.см; входным током сдвига Iвх.сд и температурными коэффициентами указанных параметров.
Быстродействие ИКН характеризуется временем переключения ИКН, определяемым продолжительностью перехода из одного состояния в другое, и дисперсией этого времени.
Современные ИКН относятся к классу аналого-цифровых интегральных микросхем. Они используются в качестве порогового элемента, составляющего основу большого класса электронных устройств: дискриминаторов амплитуды, детекторов уровня, триггера Шмитта, бистабильных индикаторов и т.д.
Сочетание порогового элемента с формирователем потенциальных уровней 1 и 0 позволяет использовать ИКН в различного рода преобразователях аналоговых сигналов в цифровые. К числу таких устройств относятся аналого-цифровые преобразователи (АЦП), преобразователи временных интервалов в последовательность импульсов и др. Выпускаются ИКН общего назначения, прецизионные и быстродействующие. Они применяются для производства различного рода генераторов импульсов. Их используют в качестве нелинейных усилителей-формирователей.
Особенностью релаксаторов на ИОУ и ИКН является то, что в них времязадающая цепь и цепь регенеративной обратной связи образуют мостовую схему. В этом нетрудно убедиться, несколько изменив схему на рис. 5.2, а так, как показано на рис. 5.3. Это структурная схема мостового генератора, в которой с помощью
Глава 21. Релаксационные устройства на интегральных микросхемах 789
элементов Z1 и Z2 реализуется
регенеративная обратная связь,
a Z3 и Z4 – отрицательная (в
схеме на
рис. 5.2, а
Z1 = R1;
Z2 = R2; Z3 = R; Z4 = 1/pC). При
этом ИМС используется в каче-
стве сравнивающего устройства
Рис. 5.3. Структурная схема
в измерительной
диагонали
моста.
Импульсное
питание
мостового релаксатора
моста реализуется выходным напряжением микросхемы. Использование мостовой схемы способствует заметному повышению стабильности частоты генерации и длительности импульсов, так как в мостовой схеме указанные параметры зависят не от абсолютного значения амплитуды сигналов в диагонали моста, а от их отношения.
В разделе 21.2 была рассмотрена схема с интегрирующей RC-цепью (см. рис. 5.2, а). Можно реализовать мостовую схему с дифференцирующей RС-цепью во времязадающем плече моста. Схема такого устройства показана на рис. 5.4 ,а. При использовании дифференцирующего контура его следует подключать к неинвертирующему входу, чтобы обеспечить во время регенеративного процесса преобладание положительной обратной связи над отрицательной (на рис. 5.4 ,a показан резистор R', который иногда включают для предотвращения перегрузки ИМС по неинвертирующему входу). При формировании импульсов положительной полярности напряжения на входах ИМС определяются соотношениями
−
t
– Uвых0
−
t
Uвх.ни(t) = (Uпор2 + Uпep) е τ ≈ (γиUвых0 + Uвых1
) е τ ;
Uвх.и = γиUвых1 ,
где
τ = RC; γи = R2/(R1 + R2); Uпep =Uвых1
– Uвых0 = Uвыхт.
Когда Uвх.ни достигает порогового напряжения Uпор1 = Uвх.и, происходит переброс релаксатора в новое временно устойчивое состояние. При этом длительность импульса tи1 выражается формулой
790
Часть 5. Проектирование релаксационных устройств
Uпор2
+Uпер
1
U 0
tи1
≈ τln
= τln
−(1
− γи )
вых
,
U
γ
γ U 1
пор1
и
и вых
а ее отклонение от расчетного значения можно оценить на основании соотношения (21.3).
а
Рис. 5.4. Схема релаксатора на ИОУ или ИКН с дифференцирующей RC-цепью (а) и эпюры напряжений на выходе Uвых и неинвертирующем входе Uвх.ни ИМС, иллюстрирующие
работу релаксатора (б)
б
Аналогично длительность второго цикла рассчитывается по формуле
Uпор1
−Uпер
1
U 1
tи2
≈ τln
= τln
−(1
− γи )
вых
.
U
γ
γ U 0
пор2
и
и вых
Можно построить мостовую схему с двумя времязадающими конденсаторами, как это показано на рис. 5.5, а. Использование одновременно дифференцирующей и интегрирующей цепей в плечах моста способствует повышению стабильности длительностей импульсов tи1 и tи2, а следовательно, и периода колебаний. Это объясняется тем, что угол пересечения сравниваемых напряжений на входах (рис. 5.5, б) больше угла пересечения этих напряжений предыдущих схем (поэтому нестабильность параметров сказывается меньше).
Недостатком рассматриваемых схем является зависимость Uвыхт и длительности импульсов от напряжений питания, а также их нестабильности в температурном диапазоне. Эти недостатки
Глава 21. Релаксационные устройства на интегральных микросхемах 791
можно исключить, дополнив релаксатор параметрическим стабилизатором на стабилитронах, заметно уменьшающим изменения выходного потенциала.
а
Рис. 5.5. Схема релаксатора с двумя
хронирующими RC-цепями
на входах ИОУ или ИКН (а)
и эпюры напряжений на выходе Uвых,
инвертирующем Uвх.и и неинвертирую-
щем Uвх.ни входах ИМС, иллюстрирую-
щие работу релаксатора (б)
б
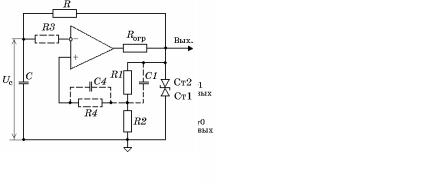
Такая схема приведена на рис. 5.6, а. Пунктиром показаны резисторы R3 и R4, которые иногда включают, чтобы предотвратить увеличение входных токов ИМС. При этом, чтобы ускорить переброс релаксатора из одного состояния в другое, резистор R4 шунтируют конденсатором С4 небольшой емкости. В период регенеративного процесса конденсатор С4 закорачивает резистор R4 и тем самым ускоряет нарастание или спад входных напряжений. Это способствует уменьшению длительности фронта и среза выходного импульса, а также повышению надежности генерации. Для такой же цели рекомендуется шунтировать конденсатором С1 и резистор R1 в цепи регенеративной обратной связи.
Длительности импульсов tи1 и tи2 можно рассчитать по формуле (21.2), принимая во внимание, что
Uвых1 = Uст1 + Uд2; Uвых0 = –(Uст2+ Uд1),
где Uст1 и Uст2 – напряжения стабилизации; Uд1 и Uд2 – перепады напряжения на стабилитронах Ст1 и Ст2 при их прямом смещении.
792
Часть 5. Проектирование релаксационных устройств
а б
Рис. 5.6. Схема релаксатора на ИОУ с параметрическим стабилизатором на выходе, построенном на стабилитронах Ст1 и Ст2 с резистором Rогр (а),
и эпюры напряжений ИМС, иллюстрирующие работу релаксатора (б)
Стабильность периода колебаний практически определяется стабильностями параметров ИМС, времязадающей цепи и характеристик стабилитронов.
В релаксаторах с интегрирующей RC-цепью (cм. рис. 5.2, а и 5.6, а), если выходные уровни ИМС Uвых1 и Uвых0 оказываются
одной и той же полярности (например, в ИКН, у которых как Uвых1 , так и Uвых0 положительной полярности), происходит срыв
автоколебаний, так как состояние Uвых0 оказывается не временно
устойчивым, и при переходе ИМС в это состояние она остается в нем сколь угодно долго. Физическая причина срыва автоколеба-
ний заключается в том, что при Uвых0 > 0 пороговый уровень Uпор2 = = γиUвых0 оказывается недостижимым для конечного значения напряжения на времязадающей цепи
Uкон = Uвых0 > Uпор2 = γиUвых0 .
Следует иметь в виду, что по той же причине происходит срыв автоколебаний и в релаксаторах на ИОУ, если последний питается от одного источника Еи.п положительной или отрицательной полярности (неиспользуемый вывод ИМС при этом заземляется).
В подобных схемах нормальный режим релаксации обеспечивают подключением к неинвертирующему входу ИМС источ-
Глава 21. Релаксационные устройства на интегральных микросхемах 793
ника смещения Есм через резистор R2, который приводит к изменению пороговых уровней:
Uпор1 = γиUвых1 + (1 – γи)Есм;
Uпор2 = γиUвых0 + (1 – γи)Есм.
При напряжении Есм > Uвых0 обеспечивается автоколебательный режим, поскольку
Uпор2 = γиUвых0 + (1 – γи)Есм > Uкон2 = Uвых0 ,
и состояние Uвых0 становится временно-устойчивым, так как при
достижении напряжения на инвертирующем входе Uвх.ин = Uпор2 происходит переброс ИМС в состояние Uвых1 .
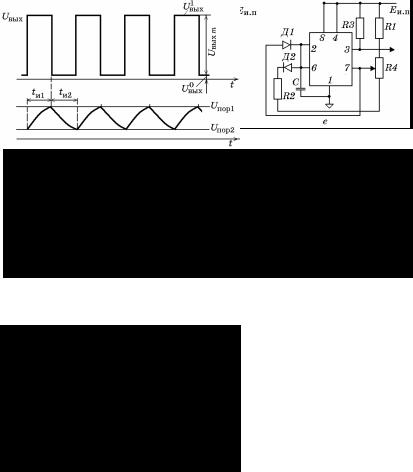
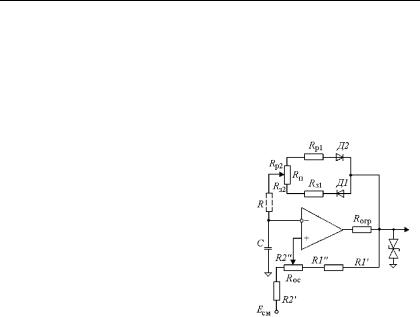
С появлением интегральных таймеров1 стала возможной разработка высокостабильных релаксаторов. На рис. 5.7 приведены основные схемы включения таймеров SE/NE555 (см. [1]) для генерирования импульсов прямоугольной формы. Так как в таймере триггер переключается только тогда, когда на обоих входах действует одновременно высокий потенциал, входы таймера (выводы 2 и 6) запараллелены и подключены к его выходу (вывод 3 или 7), потенциал которого в определенные промежутки времени превышает пороги срабатывания триггера, перебрасывающегося при пороговых уровнях.
Пороги срабатывания триггера определяются опорными напряжениями, создаваемыми на инвертирующих входах компараторов внутренним резистивным делителем. Так как резисторы имеют одинаковое сопротивление, то пороги срабатывания соответственно равны:
Uпор1 =
2Еи.п
;
Uпор2 =
Еи.п
.
3
3
Вывод 5, предназначенный для изменения опорных напряжений, шунтируют конденсатором небольшой емкости (на рис. 5.7 не показан) или используют для регулировки периода повторения импульсов, подключая его к делителю источника напряже-
1 Таймер состоит из двух компараторов, триггера, который управляется компараторами, и выходных каскадов, один из которых с разомкнутым коллектором, подключенным к выводу 7.
794
Часть 5. Проектирование релаксационных устройств
ния. Блокировку таймера исключают путем соединения вывода 4 с источником питания.
Эпюры напряжений, поясняющие принцип работы релаксаторов, показаны на рис. 5.8.
Рис. 5.7. Схемы включения таймера в релаксационных устройствах
Рис. 5.8. Эпюры напряжений на входе и выходе таймера, иллюстрирующие работу релаксационных устройств, построенных по схемам, показанным
на рис. 5.7
При появлении на выходах таймера высокого потенциала (см. промежуток времени tи1 на рис. 5.8) по мере заряда хронирующего конденсатора С входное напряжение нарастает с постоянной времени τ3:
Глава 21. Релаксационные устройства на интегральных микросхемах 795
−
t
−
t
Uвх(t) = Uпор2 е τз + Uвых1
(1 – е τз
).
Выходное напряжение Uвых1 =Uвых1
1 ≈ Еи.п
– Uбэ и Uвых1 =
=Uвых1 2 ≈Еи.п соответственно для схем на рис. 5.7, а–ги 5.7, д, е (Uбэ – разность потенциалов между базой и эмиттером выходного транзистора таймера). В схемах на рис. 5.7, а, б заряд конденсатора происходит с постоянной времени τз = RC, в схемах на рис.
5.7 ,в, г τз = R1C, в схеме на рис. 5.7, д τз = (R1 + R2)С и, наконец, в схеме на рис. 5.7, е с постоянной времени τз = (R1 + γR4)С, где
γR4 – сопротивление части переменного резистора R4, который применяется в том случае, когда требуется изменение скважности импульсов.
Когда входное напряжение достигает порогового напряжения Uпор1, триггер в таймере перебрасывается и на выходах уста-
тенциалу коллектора выходного транзистора в насыщении. При этом заканчивается формирование импульса, длительность которого, определяемая из равенства Uвх(tи1) = Uпор1, составляет
tи1
Uвых1
−Uпор2
= τз ln
.
U 1
−U
пор1
вых
Во время паузы между импульсами (промежуток времени tи2 на рис. 5.8) происходит разряд хронирующего конденсатора С, что приводит к спаду входного напряжения:
−
t
−
t
Uвх(t) = Uпор1 е τр + Uвых0
(1 – е τр ).
Всхемах на рис. 5.7, а, б разряд и заряд конденсатора происходят с одинаковой постоянной времени: τз = τр= RС.
Всхемах на рис. 5,7, в, г в течение времени tи2 отпирается выходной транзистор на выходе 7, поэтому разрядный ток конденсатора протекает через резисторы R1 и R2, и постоянная вре-
мени τр = (R1 || R2)C.
В схеме на рис. 5.7, д конденсатор разряжается с постоянной
времени τр = R2С, а в схеме на рис. 5.7, е τp = [R2 + (1 – γ)R4]С. Пауза между выходными импульсами прекращается, когда вход-
ное напряжение уменьшается до уровня Uпор2, и в таймере триггер
796
Часть 5. Проектирование релаксационных устройств
переходит в новое устойчивое состояние. Таким образом, длительность паузы tи2, определяемая из равенства Uвх(tи2) = Uпор2, составляет:
tи2
Uпор1
−Uвых0
≈ τр ln
Uпор1
= 0,7
= τр ln
τр.
U
−U 0
U
пор2
пор2
вых
В схеме на рис. 5.7,а возникают паразитные колебания на фронте импульса, которые уничтожаются путем подключения конденсатора к источнику питания, как это показано на рис. 5.7, б. Регулировку длительности импульса можно производить путем изменения постоянной времени τз. Если требуется изменить скважность импульсов в широком диапазоне, то целесообразно использовать схемы, изображенные на рис. 5.7, д, е. В схеме на рис. 5.7, д коэффициент заполнения периода можно регулировать в пределах от 0,01 до 0,5, а в схеме на рис. 5.7, е благодаря разделению при помощи диодов цепей заряда и разряда хронирующего конденсатора С этот коэффициент удается увеличить до 0,99.
Ждущий режим работы рассмотренных релаксаторов можно обеспечить, используя вход сброса 4: при низком потенциале на этом выводе таймер блокируется и только при подаче высокого потенциала устройство начинает релаксировать.
Схемы на рис. 5.7 можно использовать и в качестве широт- но-импульсного модулятора путем подачи модулирующего сигнала на вывод 5 для управления порогами срабатывания.
21.4. Ждущий режим работы релаксационных устройств на ИОУ, ИКН и таймерах
Для обеспечения ждущего режима работы в релаксационном устройстве соответствующими изменениями параметров схемы одно из временно устойчивых состояний превращают в устойчивое состояние покоя, в котором устройство может находиться сколько угодно долго, до поступления входного запускающего импульса. Под воздействием входного импульса в устройстве возобновляется регенерация с последующим переходом его во временно-устойчивое состояние, продолжительность которого определяется длительностью одиночного импульса, формируемо-
Глава 21. Релаксационные устройства на интегральных микросхемах 797
го релаксационным устройством. После завершения этапа формирования импульса устройство опрокидывается, переходя снова
вустойчивое состояние покоя, в котором остается до поступления последующего импульса. На этапе формирования на выходе релаксационного устройства появляется импульс стандартной формы, амплитуда и длительность которого определяются параметрами релаксационного устройства. При этом, чтобы исключить влияние входного запускающего сигнала на длительность и амплитуду выходного импульса, формируемого релаксатором, необходимо обеспечить соответствующие условия запуска, заключающиеся в следующем. Цепь запуска строят так, чтобы, с одной стороны, обеспечить воздействие входного сигнала на время, достаточное для переброса релаксатора во временно устойчивое состояние, а с другой стороны, чтобы практически исключить воздействие входного сигнала во время формирования выходного импульса отключением источника запускающих сигналов от релаксатора или укорочением запускающего импульса.
Таким образом, в ждущем режиме релаксатор работает как формирователь одиночных импульсов стандартной формы, амплитуда и длительность которых определяются параметрами устройства и практически не зависят от параметров (длительности, амплитуды, формы) входного запускающего импульса. Такой режим работы используют в пороговых устройствах для регистрации сигналов, амплитуда которых оказывается меньше или больше некоторой заданной величины, в формирователях импульсов со стандартными параметрами, расширителях импульсов. Ждущий режим применяется также для временного сдвига импульсов, например, для их задержки на заданное время или изменяемое в определенных пределах время, определяемое длительностью импульса на выходе релаксатора, и т.д.
Вждущем режиме могут работать почти все рассмотренные
впредыдущих разделах релаксационные устройства. При этом, чтобы одно из двух временно устойчивых состояний превратить
вустойчивое состояние покоя, необходимо предотвратить нарастание напряжения в хронирующей цепи до порогового уровня, при котором опрокидывается устройство, переходя из одного состояния в другое. Это можно реализовать установлением порогового напряжения на уровне, недостижимого напряжением, кото-
798
Часть 5. Проектирование релаксационных устройств
рое развивается на хронирующей цепи, либо предотвращением заряда или разряда хронирующего конденсатора, с тем, чтобы прервать цикл возобновления автоколебаний (рис. 5.9, а), либо применением соответствующего напряжения смещения, исключающего нарастание или спад напряжения в хронирующей цепи до порогового уровня. Релаксаторы на ИКН и таймеры можно перевести в ждущий режим путем блокировки микросхемы подачей на соответствующий выход блокирующий импульс.
Анализ и расчет ждущих релаксаторов мало отличаются от анализа и расчета соответствующих релаксаторов, работающих в автоколебательном режиме. Основное отличие заключается в выборе параметров цепей, обеспечивающих устойчивое состояние покоя, и в построении цепи запуска.
а
Рис. 5.9. Схема релаксатора на ИОУ с интегрирующей RC-цепью, работающего в ждущем режиме (а), и эпюры напряжений, иллюстрирующие его
работу (б)
б
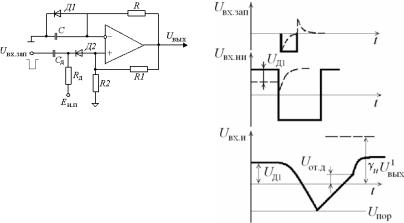
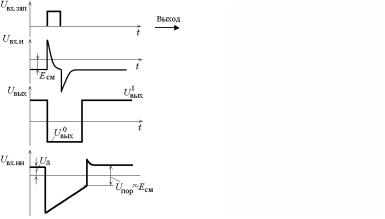
На рис. 5.9, а показана схема релаксационного устройства на ИОУ, работающего в ждущем режиме. Это устройство является аналогом релаксатора, рассмотренного в п. 21.3. Ждущий режим работы реализуется при помощи диода Д1, шунтирующего хронирующий конденсатор С. При перебросе релаксатора в состоя-
ние Uвых =Uвых1 напряжение на конденсаторе ограничивается на уровне UД1, меньшем того порогового уровня, при котором происходит возврат релаксатора в состояние Uвых =Uвых0 . Таким образом, после переброса релаксатора в состояние Uвых1 он остается в
Глава 21. Релаксационные устройства на интегральных микросхемах 799
этом состоянии до тех пор, пока запускающий сигнал отрицательной полярности, поступающий на неинвертирующий вход, не
перебросит ИОУ в состояние Uвых = Uвых0 (см. эпюры на рис. 5.10, б). При этом диод Д1 запирается и начинает действовать хронирующая RС-цепь, формируя импульс деятельностью
tи RC ln Uкон −Uнач , Uкон −Uпор
где Uнач UД1; Uкон =Uвых0 ; Uпор = γиUвых0
;
γи
=
R1
.
R1 + R2
При этом
0
0
Uвых (1−U Д1 /Uвых )
R
U Д1
2
tи RC ln
= RC
ln 1
+
1
−
.
U 0
(1− γ
)
R
U
и
0
вых
1
вых
Строго говоря, в начале цикла, когда напряжение на конденсаторе Uс > Uот, разряд конденсатора происходит более медленно, так как диод пока остается открытым. При этом, чем меньше γи, тем заметнее влияние этого эффекта.
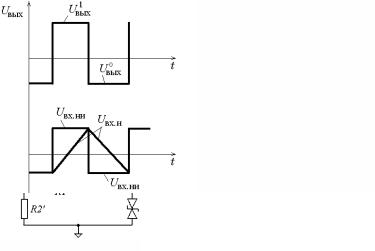
Действие диода на формируемый импульс можно исключить, применив схему с дифференцирующей цепью (рис. 5.10, а), в которой диод запирается при формировании отрицательного перепада напряжения на выходе:
При Uвх.ни(tи) Uпор –Есмпроисходит переброс релаксатора в новое состояние, которое является состоянием устойчивого рав-
новесия. Таким образом, длительность формируемого импульса
tи τln
U
кон
−U
нач
τln
Еи −Uд +Uпер
,
.п
Uкон −Uпор
Еи.п + Есм
а ее отклонение от номинальной величины и нестабильность
t
τ
τ
Е
− U
д
+ U1
− U 0
и =
+
и.п
вых
вых
−
tи
τ
tи
Еи
+Uд +Uвых1
−Uвых0
.п
−
Еи.п + Есм + Uвх.ср
.
Еи.п + Есм
800
Часть 5. Проектирование релаксационных устройств
а
Рис. 5.10. Схема релаксатора на ИОУ с
дифференцирующей RC-цепью,
работающего в ждущем режиме (а), и
эпюры напряжений, иллюстрирующие
его работу (б)
б
В качестве дифференцирующего конденсатора Сд на входе релаксатора часто используют обратно смещенный диод, емкость р-п-перехода которого обеспечивает укорочение запускающего импульса.
Аналогично строят ждущие релаксаторы на ИКН и таймерах. Отметим, что наличие блокирующего входа у ИКН и таймеров создает определенные удобства для запуска релаксатора. На рис. 5.11, а приведена схема ждущего релаксатора на таймере, запуск которого производится подачей импульса на вход 4 ("сброс"). Как известно [1], этот вход используют для блокировки таймера: при установлении низкого потенциала на входе 4 на выходах
таймера (выводы 3 и 7) устанавливается низкий потенциал Uвых0
независимо от напряжений на входах 2 и 6 таймера. В этом состоянии таймер остается до поступления импульса, деблокирующего таймер по входу 4.
Эпюры, иллюстрирующие работу релаксатора в ждущем режиме, приведены на рис. 5.11, б. В исходном состоянии таймер блокирован нулевым потенциалом на входе. При этом, хотя потенциалы на его информативных входах 2 и 6 (Uвх2 = Uвх6 = Uс < < Uпор2) соответствуют напряжениям, при которых на выходах
таймера устанавливается высокий потенциал Uвых1 , в действительности из-за блокировки на выходах устанавливается низкий потенциал Uвых0 . В момент времени t1 на вход "сброса" 4 подается им-
Глава 21. Релаксационные устройства на интегральных микросхемах 801
пульс, под действием которого таймер деблокируется и на его выходе устанавливается высокий потенциал в соответствии с условиями Uвх2 < Uпор2; Uвх6 < Uпор1. Начинается заряд конденсатора С с постоянной времени τз CR, и, когда напряжение на конденсаторе и равный ему потенциал на входе 6 достигают порогового
уровня Uпор1
= 2
3
Еи.п, таймер перебрасывается. Заканчивается
формирование импульса длительностью
U
кон
−U
нач
U
1
−U 0
t
и
τ
з
ln
τ
з
ln
вых
вых
U
−U
кон
пор1
U 1
− 2
3
Е
и.п
вых
τ
з
ln
Еи.п −Uнач
τ
з
ln 3,
Е
и.п
+
2
3
Е
и.п
где Uкон =Uвых1
; Uнач = Uвых0 .
а
Рис. 5.11. Схема релаксатора на таймере, работающего в ждущем режиме (а), и эпюры напряжений, иллюстрирующие его работу (б)
После переброса таймера в состояние
б
Uвых0 начинается раз-
ряд конденсатора С с постоянной времени τр CR. При этом если к моменту времени t4 (см. эпюры на рис. 5.11, б) деблокирующий импульс не будет снят со входа 4, то в релаксаторе возобновляются регенеративные процессы, приводящие к перебросу таймера
в состояние Uвых1 (на рис. 5.11, б такой возможный вариант пере-
броса показан штриховыми линиями). Такую особенность иногда используют для формирования пачки импульсов, число которых определяется длительностью деблокирующего импульса Uвх.зап.
802
Часть 5. Проектирование релаксационных устройств
Если же релаксатор предназначен для формирования одиночных импульсов, то до того как Uc = Uпор2, следует прекратить действие деблокирующего импульса, но не раньше, чем завершается формирование выходного импульса.
В таймере можно реализовать ждущий режим работы, также используя для запуска вход 2, отключив его от общей цепи заряда хронирующего конденсатора.
21.5.Регулировка скважности импульсов
ичастоты их следования
Для регулировки скважности импульсов, т.е. изменения коэффициента заполнения, обычно в цепь хронирующего конденсатора включают диоды и переменный резистор (рис. 5.12, а). Диоды предназначены для разделения цепей заряда и разряда хрони-
рующего конденсатора. При Uвых =Uвых1 диод Д2 запирается, поэтому заряд конденсатора производится по цепи Rз = Rз1 + Rз2 с
постоянной времени τз CRз, тогда как при Uвых =Uвых0 , наоборот, запирается диод Д1 и разряд конденсатора протекает по цепи Rр = = Rр1 + Rр2 с постоянной времени τр CRр. Коэффициент заполнения
K
зап
=
tи1
τз
=
Rз
t
+ t
τ
+ τ
R
+ R
и1
и2
з
р
з
р
можно менять изменением положения движка потенциометра. При этом максимальное и минимальное значения коэффициента заполнения
Kзапmax =
Rз + Rп
1и
Kзапmin =
Rз1
Rз
Rз
+ Rп + R1р1
+ Rп + R1р1
могут отличаться на два порядка:
т.е.
Kзап max 0,99;
Kзап min 0,01,
Kзапmax
Rп
=1 +
≥100 .
R
K
запmin
з1
Можно вместо двух резисторов Rр1 и Rз1 использовать один – R (показан пунктиром).
Глава 21. Релаксационные устройствана интегральныхмикросхемах 803
Заметим, что включение диодов Д1 и Д2 в схеме со стабилизированными Uвых1 и Uвых0 сказывается на температурной ста-
бильности длительности импульсов и периодах их колебаний. Действительно, в схеме на рис. 5.12:
Uкон1 =Uвых1
– Uд1 = Uст1 + Uд.ст2 – Uд1;
Uкон2 =Uвых0
+ Uд2 = –(Uст2 + Uд.ст1) + Uд2,
а следовательно,
Uкон1 = Uст1 + Uд.ст2 – Uд1;
Uкон2 = – ( Uст2 + Uд.ст1 – Uд2).
Поскольку токи,
протекающие
через стабилитроны и диоды Д1 и Д2,
не равны между собой, то полной
компенсации не происходит. Однако
частичная компенсация
температур-
ного дрейфа напряжения диодов Д1 и
Д2 и стабилитронов в диодном режи-
ме может способствовать повыше-
Рис. 5.12. Схема релаксатора
нию стабильности, и наоборот, так
с диодами Д1 и Д2 и
как в другом плече моста эти диоды
переменным резистором
в хронирующей цепи
отсутствуют.
для регулировки скважности
Заметим, что указанный метод ре-
выходных импульсов
регулировки скважности обеспечивает практически неизменность частоты следования импульсов, т.е. их периода:
Т з ln
Uкон1
Uнач1
р ln
Uкон2
Uнач2
Uкон1
Uпор1
Uкон2
Uпор2
(
з
)ln
Uкон1
Uнач1
С(R
R R
)ln
Uкон1 Uнач1
р
Uкон1
Uпор1
з1
п р1
Uкон1
Uпор1
(если |Uвых0 | = Uвых1 ).
Для изменения скачком частоты следования импульсов конденсаторы или резисторы переключают, а для плавной регулировки применяют потенциометр Rос в цепи ОС. При этом изменяются пороговые напряжения
соответственно и = (R2 + R 2)/(R1 + Rос + R2) , и период колебаний.
804
Часть 5. Проектирование релаксационных устройств
Параметры схемы на рис. 5.12 можно улучшить, используя для заряда и разряда конденсатора С источники тока в виде транзисторов со стабилизированным током, как это показано на рис. 5.13, а.
б
Рис. 5.13. Схема релаксатора
систочниками тока на транзисторах Т1 и Т2
ав цепях заряда и разряда хронирующего конденсатора (а) и эпюры напряжений, иллюстрирующие его работу (б)
Потенциометры в цепях базы транзисторов включают для регулировки скважности импульсов. Отметим, что в этой схеме регулировка скважности сопровождается изменением частоты.
Действительно, при Uвых =Uвых1 :
Uвх.ни = γи Uвых1
; Uвх.и(t) = γиUвых0
+
t
Iк1 ;
C
C
С
tи1 =
(Uпор1 – γиUвых0 )
γиUвыхт,
Iк1
Iк1
при Uвых =Uвых0 :
Uвх.ни = γи Uвых0 ;
Uвх.и(t) = γиUвых1 −
t
Iк2 ;
tи2
=
C
γиUвыхт.
C
Iк2
Следовательно,
1
1
Т = tи1 + tи2
+
= СγиUвыхт
Iк1
.
Iк2
Глава 21. Релаксационные устройства на интегральных микросхемах 805
Как следует из этого соотношения, период Т меняется не только при изменении γи = ( R2′ + R2′′ )/(R1 + Rос + R2), но также с изменением Iк1 и Iк2, т.е. при регулировке скважности.
Регулировку длительности импульсов, частоты их следования можно осуществить также изменением напряжений смещения и пороговых уровней. Последнее, т.е. изменение пороговых уровней, особенно удобно в релаксаторах, построенных на таймерах, у которых имеется специальный вывод 5 для изменения пороговых уровней внешним источником смещения.
При проектировании релаксационных устройств обычно интересуются стабильностью следующих параметров: амплитуды выходного импульса и его длительности, а при работе в автоколебательном режиме – также частоты следования импульсов.
Нестабильность амплитуды выходного импульса определяется изменением параметров транзисторов, формирующих выходное напряжение, нестабильностью напряжений источников питания. При работе в узком диапазоне температур изменение амплитуды импульса определяется нестабильностью источников питания и, как правило, не превышает единицы процентов. Такая стабильность в большинстве практических случаев оказывается достаточной, поэтому для стабилизации амплитуды импульса не требуется принятия специальных мер. Однако даже незначительные изменения амплитуды импульса могут стать причиной заметной нестабильности длительности импульса, поскольку в большинстве релаксаторов заряд или разряд хронирующего конденсатора, продолжительность которого определяется tи, производится выходным напряжением. Именно для этого, т.е. для уменьшения нестабильности tи, принимаются меры для стабилизации амплитуды выходного импульса Uвыхт даже в том случае, когда относительные изменения выходного напряжения незначительны. В устройствах, работающих в широком температурном диапазоне, изменение выходных потенциалов может составлять десятки процентов. При этом стабилизация этих уровней оказы-
806
Часть 5. Проектирование релаксационных устройств
вается необходимой как для уменьшения нестабильности длительности импульса, так и амплитуды выходного импульса.
В соответствии с выражением (21.3) нестабильность длительности импульса определяется соотношением
t
и =
τ
+
τ
U
кон
−
U
нач −
Uкон − Uпор
,
tи
τ
Uкон −Uнач
Uкон −Uпор
tи
на основании которого можно установить основные причины нестабильности.
Для стабилизации длительности импульса, прежде всего, требуется уменьшить относительное изменение постоянной времени Δτ/τ = С/С + R/R включением в хронирующую цепь высокостабильных элементов – резисторов и конденсаторов. В прецизионных релаксаторах иногда применяют параметрический способ стабилизации постоянной времени τ, используя резисторы и конденсаторы с температурными коэффициентами разного знака. Уменьшению нестабильности Δτ/τ способствует также применение в цепях заряда и разряда хронирующего конденсатора источников стабилизированного тока на транзисторах (см. схему на рис. 5.13, а).
Нестабильность конечного и начального напряжений Uкон и Uнач определяется изменениями амплитуды импульса, питающего хронирующую цепь. Для уменьшения этих изменений обычно прибегают к стабилизации уровней выходного напряжения, например, при помощи параметрического стабилизатора напряжения на стабилитронах (см. схемы в п. 21.5). Для этой же цели можно использовать источник стабилизированного тока на транзисторах (см. рис. 5.13, а).
Нестабильность порогового напряжения Uпор частично определяется изменением выходных уровней (если пороговые напряжения связаны с ними), напряжений источников питания (например, в таймерах) и напряжения смещения (при работе в ждущем режиме).
На нестабильности длительности импульса существенно сказывается дрейф напряжений сравнения, определяемый выражением
Uвх.др = Uвх.сд + (Rг1 – Rг2) Iвх.см +
1
(Rг1 + Rг2) Iвх.сд +
2
Глава 21. Релаксационные устройства на интегральных микросхемах 807
+ ∑Kвл.и.пl Eи.пl . l
Как известно, этот дрейф связан с изменением Uпор, а в автоколебательных устройствах также с Uнач.
В современных устройствах для уменьшения нестабильности длительности импульса tи, обусловленной влиянием Uвх.др, применяют прецизионные ИОУ и ИКН, у которых дрейф входного напряжения и входных токов значительно меньше, чем у непрецизионных устройств.
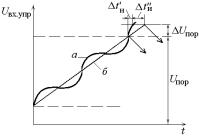
На практике применяют также схемотехнические методы стабилизации длительности импульса tи. Для получения высокостабильных по длительности импульсов необходимо, чтобы времязадающее напряжение в момент опрокидывания изменялось как можно круче. Действительно, как видно из эпюр на рис. 5.14, при изменении порогового напряжения на величину Uпор.др нестабильность длительности импульса тем меньше, чем круче нарастает напряжение в хронирующей цепи ( tи′ < tи′′ ).
Крутизну нарастания указанного напряжения можно увеличить повышением конечного уровня Uкон. Последнее достигается увеличением перепада напряжения на выходе релаксатора и т.д.
Рис. 5.14. Эпюры управляющего
напряжения Uвх.упр, иллюстрирующие изменение
длительности выходного импульса tи, вызываемое дрейфом порогового уровня Uпор.др
Можно повысить крутизну изменения напряжения в хронирующей цепи включением LC-контура, возбуждаемого импульсом тока в момент переброса релаксатора. Такой контур включают последовательно или параллельно в хронирующую цепь. При ударном возбуждении контура возникают колебания, наложение которых на напряжение в хронирующей цепи приводит к более стремительному изменению последнего. При этом заметно
808
Часть 5. Проектирование релаксационных устройств
уменьшается нестабильность длительности импульса, вызываемая изменением порогового напряжения (см. эпюры на рис. 5.15). Стабильность длительности импульса определяется стабильностью частоты колебаний, возбуждаемых в контуре. Используя в качестве ударного контура кварцевый резонатор, можно умень-
шить относительную нестабильность длительности импульса до
10–5–10–6.
Рис. 5.15. Эпюры управляющего напряжения с LC-контуром в хронирующей цепи (а)
и без LC-контура (б)
Стабилизация частоты следования импульсов, которая сводится к стабилизации периода Т = tи1 + tи2, проводится теми же способами и средствами, что и стабилизация длительности импульса. Стабилизировать частоту релаксатора можно при помощи высокостабильного внешнего генератора. Такой режим работы называют режимом синхронизации.
21.7. Проектирование релаксационных устройств на ИОУ и ИКН
Проектирование импульсных устройств, как и аналоговых [5, 6], связано с выполнением трех проектных процедур (помимо составления ТЗ и математического моделирования разрабатываемого проекта). Первая из них – математический синтез, на основе которого реализуют вторую процедуру – схемотехнический синтез. Завершается проектирование процедурой анализа эскизных проектов.
Рассмотрим особенности проектирования релаксационных устройств на конкретном примере схемы генератора прямоугольных импульсов симметричной формы:
- амплитуда Uвых1 т =| Uвых0 т | = 9 В;
Глава 21. Релаксационные устройства на интегральных микросхемах 809
-длительность tи1 = tи2 = 25 мкс;
-допустимое отклонение длительности импульсов от расчетной величины и ее нестабильность в диапазоне температур от
–40 °С до 120 °С не должна превышать
tи1
=
tи2
≤ 10 %;
tи1
tи2
- длительности фронта и среза tфр tср ≤ 0,2 мкс.
Релаксатор предназначении для раскачки ИМС со сравнительно высокоомным входным сопротивлением, шунтированным
паразитной емкостью Сн.пар = 10 пФ.
Прежде чем приступить к проектированию, выбирают микросхему. Выбор ИКН исключается, так как на нем невозможно
формировать импульс с отрицательной амплитудой: Uвых0 т = – 9 В.
Проверим возможности ИОУ АD845 [2] с параметрами:
- предельные значения входного и выходного напряжений: дифференциальное значение
ток смещения Iвх.см = 15 пА (температурный коэффициент IвхТ.см , а также ток сдвига Iвх.сд не указаны в справочнике);
-максимальная скорость нарастания и спада выходного импульса VUвых = 100 В/мкс;
-температурный диапазон работы: от –65 до 150 °С.
AD845 – это микросхема с входным дифференциальным каскадом на униполярных транзисторах. Для таких ИОУ в справочниках, как правило, не указывают входной ток сдвига Iвх.сд Iвх.ни – Iвх.и, а также температурный коэффициент (для ИОУ с входными транзисторами с управляющим р-п-переходом температурный коэффициент определяется этим коэффициентом обратного тока р-п-перехода).
810
Часть 5. Проектирование релаксационных устройств
Математический синтез сводится к составлению математической модели релаксационного устройства на основе заданного процесса функционирования и требований к точности, условий эксплуатации и т.д.
В данном случае эта процедура связана с составлением формул для определения длительности фронта tфр и среза tср генерируемых импульсов, их продолжительности tи1 и tи2, а также относительных отклонений, обусловленных разбросом параметров элементов схемы и их температурной нестабильностью.
Длительность фронта и среза можно оценить по приближенным формулам (21.6):
t
фр
0,8
Uвыхт
;
t
ср
0,8
Uвыхт
.
λ V 1
λ V 0
v U вых
v U вых
Здесь Uвыхт =Uвых1 т –Uвых0т – полная амплитуда импульсов; VU1вых и VU0вых – максимальная скорость нарастания и спада выход-
ного напряжения микросхемы; λv = 0,8÷0,6 – эмпирический коэффициент, учитывающий уменьшение скорости нарастания или
спада Uвыхт по сравнению с VU1вых и VU0вых .
В соответствии с формулой (21.6) при скорости VUвых =
= 100 В/мкс длительность перепадов импульсов на выходе ИОУ составляет
tфр = tср = 0,8
Uвыхт
= 0,8
18
=0,18 мкс < 0,2 мкс.
0,8 100
λvVU вых
Следует учитывать искажение, обусловленное перезарядом паразитной емкости Сн.пар = 10 пФ, шунтирующей выход релаксатора:
В данном случае эта поправка несущественна, так как был выбран ИМС с низкоомным выходом Rвых.ис = 5 Ом. Если tфр оказывается сравнимым с tфр (tср), то формулы для суммарного значения tфрΣ (tсрΣ)
t Σ t2 + t2 .
фр фр фр
На основании представленных формул устанавливают требования к скорости нарастания (спада) выходного импульса на выходе ИМС.
Глава 21. Релаксационные устройства на интегральных микросхемах 811
Постоянные времени заряда τз = CRз и разряда τр = CRр конденсатора С в хронирующей цепи рассчитывают на основании формул (21.2) исходя из заданных значений длительности tи1 и tи2. В проектируемой схеме tи1 = tи2, поэтому τз = τр = CR. При этом
τ ≡ RC =
tи1
.
(21.7)
U
−U
ln
кон1
нач1
−U
пор1
Uкон1
Здесь
Uкон1 Uвых1
− Iвх1
.инR Uвых1
т = 9 В;
U
нач1
=U
пор2
γ U 0
= −γ
9
В;
U
пор1
γ U1
= γ
9 В,
u выхт
u
u вых
u
где γи = R2/(R1 + R2) – коэффициент передачи в канале регенеративной обратной связи.
В схеме с источником смещения напряжением Есм пороговые уровни определяются с учетом Есм, т.е.
Источником Есм регулируют скважность импульсов. В проектируемой схеме tи1 = tи2. В схеме на ИКН включение источника Есм необходимо для предотвращения срыва генерации.
При расчете постоянной времени τ напряжение на конденсаторе в начале циклов формирования импульсов Uначi и конечные потенциальные уровни Uконi, к которым стремятся напряжения на конденсаторе, оценивают приближенно, без учета перепадов напряжений во входных цепях ИМС, вызываемых токами Iвх.ин и
Iвх.и, а также напряжения регенерации Uвх.рег (поэтому Uкон1, Uнач1, Uпор1 отмечены значком приближения).
Отклонение длительности импульса tиi/tиi от расчетной величины, обусловленное разбросом сопротивлений резисторов Rз, Rр и емкости конденсатора С, определяется относительными величинами этих параметров:
τ
R
C
τp
Rp
C
τ
з =
з +
C
;
=
+
.
(21.8)
τ
R
C
з
R
p
з
p
Этими же соотношениями можно установить изменение tиi/tиi в температурном диапазоне, подставляя в формулы (21.8) вместо разброса R/R и С/С дрейфовые отклонения, определяемые температурными коэффициентами резисторов и конден-
812
Часть 5. Проектирование релаксационных устройств
саторов с учетом их знаков. Один из эффективных способов уменьшения tиi/tиi в температурном диапазоне – это использование в хронирующей цепи резисторов Rз, Rр и конденсатора С с температурным коэффициентом противоположного знака возможно одинаковой величины. При оценке влияния разброса параметров на tиi/tиi величины R/R и С/С суммируются, так как, во-первых, это – случайные величины и, во-вторых, оценка проводится с целью установления предельного номинала элемента (переменного резистора или триммера), регулирующего длительность импульса.
При реализации схемы печатным монтажом вес, габариты и занимаемую площадь устройства можно заметно уменьшить применением в качестве хронирующей цепи распределенных RC- структур, состоящих из пленочных резисторов и диэлектрических слоев. При этом, выбрав температурные коэффициенты сопротивлений и емкостей противоположного знака и возможно одинаковой величины, можно практически исключить изменение Δτ/τ в температурном диапазоне.
Как следует из формулы (21.3), относительное отклонение и изменение длительности импульса tи/tи (помимо Δτ/τ) определяется также Uкон, Uнач, Uпор, вызываемыми разбросом параметров и их температурным дрейфом. Влияние указанных напряжений определяют на основании соотношений
Uнач1 ≡Uпор1 =Uвх0
.ни
+Uвх0
.рег =
(21.9)
= γ U 0
+ (1 − γ
)E
− I 0
(R || R ) +U 0
u
см
;
u
вых
вх.ни
1
2
вх.рег
Uнач2
≡Uпор2 =Uвх1
.ни
+Uвх1
.рег =
(21.10)
= γ U1
+ (1 − γ
)E − I1
(R || R ) +U1
u
.
u
вых
см
вх.ни
1
2
вх.рег
Uкон1 =Uвых1
− Iвх1
.ниR ; Uкон2
=Uвых0 − Iвх0
.ниR ,
(21.11)
где Iвх1
.ни , Iвх0
.ни
и Iвх1
.ин ,
Iвх0
.ин
– входные токи в неинвертирую-
щем и инвертирующем входах ИМС соответственно при Uвых =
=Uвых1 и Uвых =Uвых0 .
Поскольку представленные в формулах (21.9)–(21.11) параметры зависят от состояния ИМС, то как здесь, так и в дальнейшем они отмечены верхними индексами 1 и 0, соответствующи-
Глава 21. Релаксационные устройства на интегральных микросхемах 813
ми Uвых1 и Uвых0 . Когда напряжения на инвертирующем входе
(Uвх0 .ин и Uвх1 .ин ) достигают пороговых уровней (Uпор1 и Uпор2), возобновляется регенерация. Пороговые уровни отличаются от напряжений на инвертирующем входе во временно устойчивых со-
стояниях (Uвх0 .ни и Uвх1 .ни ) на величину Uвх0 .рег и Uвх1 .рег , при кото-
рых возобновляется регенерация. Последние определяются разностью потенциалов на входах ИМС, при которой коэффициент усиления релаксатора становится больше единицы. Строгое оп-
ределение Uвх0 .рег и Uвх1 .рег затруднительно, поэтому в последую-
щих выводах принято считать их равными отклонению от номинальной величины разности входных напряжений ИМС, обусловленных разбросом параметров и их температурным дрейфом, т.е.
Uвх0
.рег Uвх1
.рег Uвх.сд;
Uвх.рег
Uвх.сд
,
Т
Т
где Uвх.сд – разность напряжений на входах ИМС, при которой ее выходное напряжение достигает среднего уровня. В схемах на ИОУ используется напряжение смещения Uвх.см и его температурный коэффициент Uвх.см/ Т вместо соответствующего значения напряжений сдвига (так как в справочниках для ИОУ не ука-
зывается Uвх.сд).
Определим отклонения от номинальной величины разности потенциалов на входах ИМС при формировании импульса с длительностью tи1:
(U
кон1
−U
нач1
) ≡ [U 1
− Е
см
(1− γ
u
) − γ U 0
] −
вых
u
вых
(21.12)
− [RI1
− (R || R )I 0
] +
U 0
;
вх.ин
1
2 вх.ни
вх.рег
(Uкон1 −Uпор1 ) ≡
[(1 − γu )(Uвых1
− Есм)] −
(21.13)
− [RI
1
− (R || R )I1
] +
U 1
.
вх.ин
1
2
вх.ни
вх.рег
Сначала установим, какие схемотехнические меры надо принять, чтобы уменьшить изменение длительности импульса tи1,
вызываемое температурным дрейфом напряжений Uвых1 и Uвых0 , Есм, входных токов ИМС и сопротивлений R, R1 и R2 резисторов. Дрейф выходных потенциалов Uвых1 и Uвых0 , оказывающий наиболее заметное влияние на tи, уменьшают включением к вы-
814
Часть 5. Проектирование релаксационных устройств
ходу ИМС параметрического стабилизатора на стабилитронах (см. схему на рис. 5.6) с температурным коэффициентом напряжения, не превышающим сотые доли процента, причем с одина-
ковым знаком как для положительного потенциала Uвых1 , так и отрицательного Uвых0 . Последнее обстоятельство способствует еще большему уменьшению tи, поскольку уменьшается разность
(Uвых1 − γиUвых0 ) (см. (21.12)).
Для ослабления дрейфа входных токов Iвх.ин и Iвх.ни необ-
ходимо обеспечить выполнение известного условия стабилизации режима ИОУ и ИКН, выбрав R = R1||R2 и резисторы R, R1 и R2 с одинаковыми температурными коэффициентами. При этом одновременно решается и проблема Δγи /γи = 0, благодаря чему
первое слагаемое в соотношении (21.13) (Uвых1 − Есм ) Δγи /γи = 0.
Реализация указанных способов уменьшения температурного дрейфа параметров релаксаторов возможна только в мостовой схеме (см. п. 21.3), в которой ИОУ или ИКН используется в качестве сравнивающего устройства в измерительной диагонали моста. Поскольку в мостовой схеме частота генерации и длительности импульсов зависят не от абсолютных значений напряжений в диагонали моста, а от их отношения, то нестабильность длительности импульса tиi/tиi существенно уменьшается. Для импульсов с длительностью tи1
t
τ
τ
1
(1 − γu )
0
0
и1
=
+
[Uвых − Eсм
− γuUвых] +
Uвх.рег
−
t
τ
t
U
1
− γ U 0
− (1 − γ
)E
и1
и1
u
вых
u вых
см
(21.14)
1
− γu ) −
1
−
(Uвых − Eсм)(1
Uвх.рег
.
(U1
− E
)(1 − γ
)
u
вых
см
При выводе этой формулы учитываем, что Δγи /γи = 0, и пренебрегаем разностью R(Iвх.ин – Iвх.ни ), что вполне допустимо при
R = R1||R2.
Схемотехнический синтез начинают с выбора структурной схемы релаксатора. Будем использовать схему на ИОУ с параметрическим стабилизатором на выходе, построенном на двуханодном стабилитроне (см. рис. 5.6, а), в качестве которого можно применять КС192А с Uст = ±9,5 В, температурным коэффициентом
Глава 21. Релаксационные устройствана интегральныхмикросхемах
815
ткн < 10–2%/ С, током
Iст = 6 мА.
При Еи.п = 12,5 В и
токе
Iвых.ис = 6 мА
выходное
напряжение
AD845 составляет порядка
12 В. Для
нормальной
работы сопротивление резистора Rогр,
ограничивающего ток стабилитрона на уровне Iст = 6 мА,
Поскольку релаксатор предназначен для генерации симметричных импульсов с амплитудами 9 В, то источник смещения не
требуется (Есм = 0).
При выборе коэффициента передачи в канале регенеративной связи и = R2/(R1 + R2) надо учитывать, что с увеличением и петля гистерезиса расширяется, однако возрастает нестабильность tи из-за увеличения нестабильности пороговых уровней в результате увеличения глубины положительной обратной связи. Обычно принимают и = 0,5 и R1 = R2. При этом в соответствии с формулой (21.7) постоянная времени
tи1
25 10 6
22,76 мкс,
U
кон1
U
нач1
ln3
ln
Uпор1
Uкон1
где Uкон1 =Uвых1 = 9 В; Uнач1 = иUвых0 = –4,5 В; Uпор1 = иUвых1 = 4,5 В.
Выбрав конденсатор с емкостью Сном = 910 пФ при сопротивлениях резисторов R = 24 кОм, R1 = R2 = 47 кОм, получим
= RC = 21,8 мкс; (R1||R2) = 23,5 кОм R = 24 кОм.
Отклонение емкости С и сопротивления R от номинальных величин, влияющих на длительности импульсов, устраняют включением переменного резистора или триммера в хронирующую RC-цепь. Чтобы уменьшить изменение tи в температурном диапазоне, необходимо использовать сопротивление R и емкость С с температурными коэффициентами противоположного знака. При допусках 2 % для емкости С и 5 % для резистора R отклонение постоянной времени от номинальной величины / = = С/С + R/R = 0,07, что приведет к отклонению длительностей импульсов на 7 %. Это отклонение просто устраняется регулировкой tи.
Изменение длительности импульсов, обусловленное температурным дрейфом параметров элементов схемы, определяется дрейфом напряжения регенерации
изменениями коэффициента передачи и/ и и постоянной времени / (последние в случае, если невозможно было реализовать схемотехнические способы их устранения выбором резисторов R1 и R2 с одинаковыми температурными коэффициентами, а емкость С и сопротивление R с противоположными знаками температурных коэффициентов).
Оценим влияние Uвых = 85,5 10–3В и Uвх.рег.др = 0,143 10–3В на основании формулы (21.14):
t
1
0
0
(1 u )U
1
U
1
и1
[Uвых uUвых]
Uвх.рег.др
вых
вх.рег.др
t
t
U1
U 0
(1
)U
1
и1
и1
u
вых
u
вых
вых
22,76
1,5 85,5 0,14
0,5 85,5 0,14
3
10
25
1,5 9
0,5 9
22,76
(9,51 9,53) 10
3
22,76
(2,074) 10 5
1,9 10 5 ,
25
25
1,9 10 5
tи1
0,1.
tи1
доп
То, что расчетная величина tи1/tи1 оказалась почти на четыре порядка меньше допустимой, объясняется особенностью мостовой микросхемы, благодаря действию которой разность (9,51 – 9,53) 10–3= – 2,074 10–5уменьшилась более чем на два порядка.
Анализ эскизных проектов связан с учетом всех факторов (разброс параметров, их температурный дрейф, изменение напряжений питания и т.п.). Его целесообразно проводить моделированием на компьютере.
1 В проектируемой схеме используется ИОУ с униполярными транзисторами на входах с токами Iвх.ин и Iвх.ни пренебрежимо малой величины даже при t = 150 С.