

Башуров Методика решения математических задач 2011
.pdf2) ∫ f (М)ds = ∫ f (М)ds ;
M0 M1 M1M0
3) ∫ f (М )ds = ∑∫ f (M )ds , если кривая Г представима в виде
Г k Гk
объединения набора кривых {Гk }, имеющих общими только гра-
ничные точки.
Если кривая Г задана параметрически, т.е. x =ϕ(t), y = ψ(t),
z = χ(t), то для вычисления интеграла удобно воспользоваться
формулой ds =  dx2 + dy2 + dz2 , и тогда криволинейный интеграл
dx2 + dy2 + dz2 , и тогда криволинейный интеграл
перейдет в определенный интеграл:
t1
∫ f (ϕ(t ),ψ(t ),χ(t )) ϕ′2 (t )+ ψ′2 (t )+ χ′2 (t )dt .
t0
Здесь t0 и t1 – значения параметра t, отвечающие начальной и конечной точкам кривой.
Если кривая замкнутая (т.е. любая ее точка может считаться начальной и одновременно конечной), используют обозначение
|
∫ f (М )ds . |
|
Г |
Определение 7.2. Если в качестве сомножителей в интеграль- |
|
N |
|
ную сумму ∑ f (Mk ) |
sk вместо sk входят проекции криволи- |
k =1 |
|
нейного отрезка sk |
на координатные оси, то предел этих сумм |
определяет набор криволинейных интегралов второго рода и, в случае плоской кривой, они обозначаются
∫P (x, y)dx и ∫Q(x, y)dy .
ГГ
Обычно эти два интеграла соединяют вместе и имеют дело с одним криволинейным интегралом
∫P (x, y)dx + Q (x, y)dy .
Г
81

Свойства этого интеграла те же, что и у интеграла первого рода (за исключением свойства 2). Вместо него имеет место соотношение:
∫ P (x, y)dx + Q(x, y)dy = − ∫ P (x, y)dx + Q (x, y)dy .
AB BA
Для вычисления криволинейного интеграла второго рода используют две возможности: 1) связывают интеграл второго рода с некоторым интегралом первого рода при помощи формул dx = cos αds и dy = sin αds , где α – угол между касательной к кри-
вой Г и осью x, т.е. |
′ |
tg α = yx . И тогда получают интеграл |
|
∫ P (x, y)dx + Q(x, y)dy = ∫ (P (x, y)cos α + Q (x, y)sin α)ds . |
|
AB |
AB |
Второй способ напрямую связывает вычисление интеграла второго рода с определенным интегралом. Если кривая, по которой производится интегрирование, задана уравнением y = ϕ(x), то
dy = ϕ′(x)dx
и
b
∫ P(x, y)dx +Q(x, y)dy = ∫(P(x,ϕ(x))+Q(x,φ(x))ϕ′(x))dx ,
AB |
a |
где a и b отвечают началу и концу кривой Г.
В случае какого-либо другого способа задания кривой Г ищите возможность выразить дифференциалы dx и dy через дифференци-
ал одной какой-нибудь переменной, не обязательно x или y. Теорема 7.1 (теорема Грина). Если Г – граница области D и
функции P(x,y), Q(x,y) непрерывны, вместе со своими частными производными первого порядка, в замкнутой области D+Г, то имеет место равенство:
∫P(x, y)dx +Q(x, y)dy = ∫∫ ∂Q |
− |
∂P dxdy , |
|||
|
|
|
|
|
|
Г |
D |
∂x |
|
∂y |
|
где S – область внутри кривой Г.
Теорема 7.2. Если во всей области D выполнено соотношение
∂P ∂Q
∂y = ∂x , то:
82
а) |
интеграл |
∫ P(x, y)dx + Q(x, y)dy |
по любой замкнутой кри- |
|
|
Г |
|
вой Г, целиком лежащей в области D, равен нулю; |
|||
б) |
интеграл |
∫ P(x, y)dx +Q(x, y)dy |
по любой кривой, соеди- |
|
|
AB |
|
няющей точки А и B, равен одному и тому же числу;
в) интеграл ∫ P (x, y)dx + Q (x, y)dy может рассматриваться как
AB
функция конечной точки кривой AB , т.е. являться функцией двух переменных x и y, где x и y – координаты конечной точки кривой
AB .
Теоремы 7.1 и 7.2 очень важны при решении большинства задач на взятие криволинейных интегралов или задач, связанных с ними. Одной из таких задач является задача о нахождении потенциала по силовому полю.
|
|
Определение |
7.3. |
Потенциалом |
силового |
поля |
|||||
|
F = P (x, y)i + Q (x, y) j |
называется |
функция |
U(x,y), удовлетво- |
|||||||
ряющая тождествам: |
|
|
|
|
|
|
|||||
|
|
|
|
|
∂U |
= P(x, y), |
∂U |
= Q(x, y). |
|
|
|
|
|
|
|
|
∂x |
∂y |
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
Условием существования потенциала вновь является условие |
|||||||||
|
∂P |
= |
∂Q |
, где в качестве функций P(x,y) и Q(x,y) выступают ком- |
|||||||
|
∂y |
|
|||||||||
|
|
∂x |
|
|
|
|
|
|
|
||
поненты «силового» вектора F .
Если установлено существование потенциала, то его выражение находится при помощи криволинейного интеграла второго рода
U (x, y)= ∫P(x, y)dx + Q(x, y)dy , |
(7.1) |
AB
где А – произвольно выбранная точка, а кривая AB – любая кривая, соединяющая точки А и B(x,y).
83
7.2. Примеры решения задач
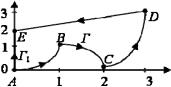
Пример 7.1. Найти криволинейный интеграл ∫(x2 + y2 ) dx + 2 yxdy по
Г
кривой Г, соединяющей точки A(0,0) и Е(0,2) и изображенной на рис. 7.1.
Рис. 7.1 Поскольку кривая не замкнута, да еще имеет «замысловатый вид», прямой способ взятия интеграла отпадает. Проверим выполнение ус-
ловия |
∂P |
= |
∂Q |
(здесь P = x2 + y2, Q = 2yx). Так как оно выполнено, |
∂y |
∂x |
мы можем вместо исходной кривой Г взять удобную для нас другую кривую Г1, изображенную на рис. 7.1, и после этого, учитывая, что на этой кривой dx = 0, получим представление криволинейного интеграла в виде одного простого интеграла.
На этапе 4 решения проводим все преобразования и вычисления (без лишних уже слов):
2
∫(x2 + y2 )dx + 2 yxdy = ∫2 yxdy = 0 ,
Г |
0 |
так как на отрезке Г1 x = 0.
Несколько слов о приближенных методах вычисления определенных интегралов. Все они основаны на отказе от предельного перехода в суммах Римана и сводятся к конечному суммированию некоторых вполне определенных слагаемых. Точность приближенного интегрирования связана с одним или несколькими параметрами, называемыми шагом или шагами интегрирования, Процедура приближенного взятия интегралов позволяет вычислять интегралы с любой степенью точности. Это, в свою очередь, позволяет решение какой-либо задачи, представленное в виде интегралов, считать полученным. (Подробно об этом говорится в курсе «Вычислитель-
ная математика».)
Пример 7.2. Найти потенциал силового поля
F = y cos(xy) i + x cos(xy) j .
84
Сначала проверим, является ли силовое поле потенциальным.
Условие потенциальности – это выполнение равенства ∂Fx = ∂Fy .
∂y ∂x
Для нашего силового поля |
|
|
|
|
||||||
|
∂Fx |
= |
∂( y cos(xy)) |
|
= |
xycos(− xysin) |
xy) , |
( |
||
|
∂y |
|
∂y |
|||||||
|
|
|
|
|
|
|
|
|||
|
∂Fy |
|
= |
|
∂(x cos(xy)) |
= |
xycos(− xy sin) |
xy) |
( |
|
|
∂x |
|
|
∂x |
||||||
|
|
|
|
|
|
|
|
|||
и условие потенциальности выполнено. Поскольку условие потенциальности одновременно является условием независимости криволинейного интеграла от пути интегрирования, то в формуле (7.1), дающей выражение для потенциала, мы можем выбрать путь ин-
тегрирования, |
изображенный на |
|
|
|
|
|
рис. 7.2. |
|
y |
|
|
B |
|
Начальная точка пути интег- |
|
|
|
|
||
y |
|
|
(x, y) |
|
||
рирования может быть выбрана |
|
|
|
|||
|
|
|
|
|
||
произвольно и мы в этом каче- |
|
|
|
|
|
|
стве выбрали начало координат. |
|
|
|
|
|
|
Проведя |
интегрирование в |
|
|
|
A |
x |
формуле (7.1) и учитывая что |
0 |
|
x |
|||
на отрезке АB dx = 0 и x = const, |
|
Рис. 7.1 |
|
|||
а на отрезке ОА dy = 0 и y = 0, получим ответ: U = sin(xy). Проверка заключается во взятии частных производных от по-
лученного выражения для потенциала и в сравнении их с компонентами исходного силового поля.
7.3. Задачи для самостоятельного решения
Вычислить криволинейные интегралы: 7.1. ∫xds , где Г – кривая y = x2, x [0,1].
Г |
|
|
|
|
7.2. ∫2xyds , где Г – четверть эллипса |
x2 |
+ |
y2 |
=1 , лежащая в |
4 |
|
|||
Г |
9 |
|
||
|
|
|
|
|
первом квадранте.
85
|
∫(x + z)ds , где Г |
|
|
|
|
|
|
y = |
3t2 |
3 |
|||||||||||||||
7.3. |
– дуга кривой x = t, |
|
, z |
= t , 0 ≤ t ≤ 1. |
|||||||||||||||||||||
2 |
|||||||||||||||||||||||||
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
7.4. |
∫ x dx + |
ydy , где Г – кривая y = x2, x [0,1]. |
|
||||||||||||||||||||||
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
7.5. |
∫ydx − xdy , где Г – дуга эллипса x = a cost, 0 ≤ t ≤ 2π. |
||||||||||||||||||||||||
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y = bsin t, |
|
||||||||
7.6. |
∫x2 dx − y2 xdy , |
|
где Г |
– кривая, |
заданная |
уравнением |
|||||||||||||||||||
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
y = (1−ex ) |
|
1 |
|
|
, 0 ≤ x ≤ 2. |
|
|
|
|
|
|
|||||||||||||
|
1−e2 |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
∫y sin |
2 |
|
|
|
|
|
1 |
|
|
|
sin 2x |
|
|
|
|
|
|
|||||||
7.7. |
|
|
|
xdx |
+ |
|
|
x − |
|
dy , где Г – отрезок прямой, со- |
|||||||||||||||
|
2 |
4 |
|||||||||||||||||||||||
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
единяющий точки А(0,0), В(1,1). |
|
|
|
|
|
|
||||||||||||||||||
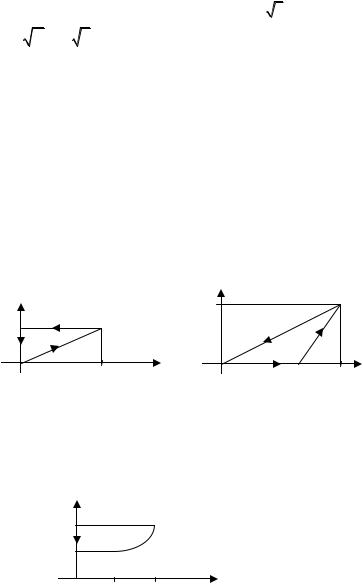
7.8. |
∫ yxdx −(x2 + y2 )dy , где контур Г представлен на рис. 7.3. |
||||||||||||||||||||||||
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
Г |
C |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
B |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
2 |
3 |
|||||||||||
|
|
|
|
|
|
|
Рис. 7.3 |
|
|
|
|
|
|
|
|
Рис. 7.4 |
|||||||||
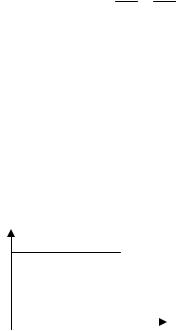
7.9. |
∫sin(x + y)dx + cos(x + y)dy , где контур Г представлен на |
||||||||||||||||||||||||
|
Г |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
рис. 7.4.
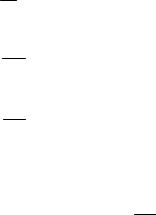
7.10. ∫ x2dx −xydy , где контур Г представлен на рис. 7.5.
Г
2 Г
y = (x – 1)2 + 1
1
1 |
2 |
Рис. 7.5 |
|
|
86

7.11.∫ x2 y3dy + 1x3 y2 dx , где контур Г представлен на рис. 7.6.
Г 3
|
D 4 |
|
|
|
C |
|||
|
– |
|
A |
|
|
B |
|
|
|
|
|
|
|
|
|||
Рис. 7.6 |
|
1 |
1 |
2 |
1 |
|||
|
|
|
|
|
|
|
|
|
Найти потенциал силового поля:
7.12.F = xy2i + x3 y j .
7.13.F = 2x2 y3i + 2x3 y2 j .
7.14.F = x2 y i − ( y2 − yx) j .
7.15.F = xcos xy j + y cos xy i .
7.16.F = sin(x2 + y2 ) y i + cos(x2 + y2 )x j .
|
3 |
2 |
2 |
x3 |
2 |
|
||
7.17. |
F =(x |
+x y +xy |
)i + |
|
+αx y j , при каком α это воз- |
|||
3 |
||||||||
|
|
|
|
|
|
|
||
можно?
РЕКОМЕНДУЕМАЯ ЛИТЕРАТУРА
1.Архипов Г.И., Садовничий В.А., Чубариков В.Н. Лекции по математическому анализу. М.: Высшая школа, 1999.
2.Фихтенгольц Г.М. Основы математического анализа. Т. 2. СПб.:
Лань, 2006. С. 137–178, 212–370.
3.Пискунов Н.С. Дифференциальное и интегральное исчисления.
Т. 2. М.: Физматлит, 1972. С. 160–253.
87

Глава 8. ЭЛЕМЕНТЫ ВЕКТОРНОГО АНАЛИЗА
8.1. Определения, основные теоремы и формулы
Стандартное представление кривых, к которым сводятся любые формы их задания, имеет вид:
x = ϕ(t ),
r = r (t) или y = ψ(t ), (8.1)
z = χ(t ),
Стандартное представление поверхностей, к которым сводятся любые формы их задания, имеет вид:
x = ϕ(u,v), |
|
|
(8.2) |
r = r (u,v) или y = ψ(u,v), |
z = χ(u,v).
Векторные функции можно дифференцировать по тем же правилам, что и обыкновенные, так как они, по сути, есть не что иное, как две обыкновенные функции для векторов на плоскости и три – для векторов в пространстве.
Рассмотрим сначала кривые. Отметим на рассматриваемой кривой какую-либо произвольную точку М0 и введем естественную
параметризацию этой кривой, выбрав в качестве параметра длину дуги от точки М0 до произвольной точки М(x,y,z) этой кривой. По
формуле
t1 |
|
s = ∫ ϕ′2 (t )+ ψ′2 (t )+ χ′2 (t )dt |
(8.3) |
t0 |
|
найдем зависимость s от t. Обратив эту функцию, получим зависимость t = g(s) и, таким образом, получим уравнение кривой в натуральных координатах r = r (g(s)) или в координатной записи
x = ϕ(g (s)),
y = ψ(g (s)),
z = χ(g (s)).
88
Формулы Френе позволяют построить систему координат, привязанную к рассматриваемой кривой и меняющуюся от точки к точке этой кривой. В этом ее принципиальное отличие от неподвижной декартовой системы координат.
Рассмотрим некоторую точку М0 кривой:
dr
1) ds = τ0 , где τ0 – единичный вектор, направленный вдоль ка-
сательной к кривой в точке М0;
2)ddsτ0 = k n0 , где n0 – единичный вектор, перпендикулярный вектору τ0 , а k – кривизна кривой в точке М0;
3)dnds0 = −kτ0 + æ b0 где b0 – единичный вектор, называемый
«бинормалью», а коэффициент æ носит название «коэффициента кручения»;
4) последнее уравнение в системе уравнений Френе имеет вид:
ddsb0 = −æ n0 .
Построенная тройка единичных векторов τ0 , n0 и b0 образует базис, называемый трехгранником Френе.
Величина, обратная кривизне кривой, называется радиусом кривизны, и механическим аналогом этой величины является максимальный радиус колеса, которое может без толчков двигаться по
кривой в окрестности точки М0. |
|
Стандартное представление поверхностей |
имеет вид |
r = r (u,v). |
|
Частные производные от уравнения r = r (u,v) |
по u и v в точке |
поверхности М0(u0,v0) определяют два вектора Э1 и Э2 , которые вместе с точкой М0 задают касательную плоскость к поверхности в точке М0. Ее уравнение r − rM0 = uЭ1 + vЭ2 . Вектор [Э1, Э2 ] – век-
торное произведение векторов Э1 и Э2 , определяет направление нормали к поверхности в точке М0.
89

Если уравнение поверхности задано в виде z = f (x, y), то на-
правление нормали N в точке поверхности z = f (x, y) совпадает с градиентом функции ϕ(x, y, z)= z − f (x, y), т.е. можно положить
N = grad ϕ .
Первая квадратичная форма Гаусса для поверхности, заданной
x = ϕ(u,v),
уравнениями y = ψ(u,v), в точке поверхности определяется мат-
z = χ(u,v),
E |
F |
, где |
рицей A = |
|
|
F |
G |
|
E = |
∂ϕ 2 |
|
∂ψ 2 |
|
∂χ 2 |
|
||||||||||||||||||||||
|
|
|
|
|
|
+ |
|
|
|
|
|
|
+ |
|
|
|
|
|
, |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
∂u |
|
|
∂u |
|
∂u |
|
|
|||||||||||||||||||
G = |
∂ϕ 2 |
+ |
∂ψ 2 |
+ |
∂χ 2 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
(8.4) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
∂v |
|
|
∂v |
|
∂v |
|
|
|||||||||||||||||||
F = |
∂ϕ |
|
∂ϕ |
+ |
∂ψ |
|
∂ψ |
+ |
∂χ |
|
∂χ |
. |
|
|||||||||||||||
|
|
∂u ∂v |
|
|
∂u ∂v |
|
|
∂u ∂v |
|
|||||||||||||||||||
Квадратичная форма Гаусса имеет вид: |
|
|
|
|||||||||||||||||||||||||
Edϕ2 + 2Fdϕdψ + Gdψ2. |
|
|
(8.5) |
|||||||||||||||||||||||||
Элемент длины элементарного отрезка, лежащего на поверхно- |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = ϕ(u,v), |
|
||||||||||
сти, заданной системой уравнений y = ψ(u,v), |
определяется че- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z = χ(u,v), |
|
||||||||||
рез элементы первой квадратичной формы Гаусса выражением |
||||||||||||||||||||||||||||
ds = |
|
|
|
Edu2 + 2Fdudv +Gdv2 . |
|
|||||||||||||||||||||||
Длина кривой, задаваемой |
|
уравнениями u = ϕ(t ), v = ψ(t ), а |
||||||||||||||||||||||||||
x = ϕ(u,v),
стало быть, лежащей на поверхности y = ψ(u,v), имеющей нача-
z = χ(u,v),
ло в точке М0(t0) и конец в точке М1(t1), вычисляется по формуле
90