

Михеев Исполнителные устройства автоматических 2008
.pdfдуги в сварочном аппарате, резец в металлообрабатывающем станке, лентопротяжный механизм в магнитофоне.
Рис. 1.10
В реальных условиях существуют и более сложные зависимости, которые в общем случае могут быть сведены к комбинации вышеперечисленных.
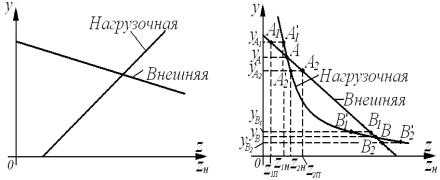
Согласование преобразователя с нагрузкой. Статическая устойчивость. Развернём нагрузочную характеристику на 90 градусов и совместим её с внешней характеристикой преобразователя (рис. 1.11, а). Точка пересечения соответствует стационарному режиму работы, так как в этой точке выполняется равенство NH=NПР, т.е. мощность, отдаваемая преобразователем в нагрузку, равна потребляемой мощности. Условию равенства мощностей удовлетворяют точки А и В на рис. 1.11, б, но эти две точки не эквивалентны с точки зрения устойчивости. Под статической устойчивостью системы преобразователь – нагрузка понимается способность её при постоянном значении входного сигнала возвращаться в исходную точку после случайного изменения значения выходной величины, которое могло произойти под влиянием каких-либо внешних воздействий (например колебания температуры, колебания напряжения питания, и т.д.).
21
а) |
б) |
|
Рис. 1.11 |
Рассмотрим точку А на рис. 1.11, б. Пусть при случайном воздействии выходная величина увеличилась до значения yА1. Мощность, отдаваемая преобразователем yА1z1П стала меньше, чем мощность, потребляемая нагрузкой yА1z1Н. Под действием этой разности мощностей выходная величина уменьшится до исходного значения yА. Если первоначальное изменение выходной величины происходило в сторону её уменьшения – yА2, то, рассуждая аналогично, получим: мощность, отдаваемая преобразователем yА2z2П, стала больше мощности, потребляемой нагрузкой yА2z2H. Возникшая разность мощностей приведёт к возрастанию выходной величины до первоначального значения. Таким образом, точка А остаётся устойчивой.
Теперь возьмем точку В. Случайное увеличение выходной величины до значения yВ1 приведёт к тому, что мощность, отдаваемая преобразователем будет превышать мощность, потребляемую нагрузкой. Положительная разность мощностей приведёт к дальнейшему росту выходной величины. Случайное уменьшение y до значения yВ2 обусловит превышение мощности, потребляемой нагрузкой, над мощностью, отдаваемой преобразователем, что вызовет дальнейшее уменьшение выходной величины. Таким образом, точка В является неустойчивой.
Изменение выходной величины в случае неустойчивости точки будет происходить до тех пор, пока мощности преобразователя и нагрузки снова не сравняются, а это может произойти при нулевой
22
мощности, Nн = Nпр = 0, т.е. при случайном уменьшении выходной величины упадёт до нуля, а при случайном увеличении вырастет до y0. Если и нагрузочная и внешняя характеристики падающие, можно воспользоваться математическим критерием устойчивости: если в точке пересечения характеристик выполняется неравенство
dyZ < Zdyн , то эта точка устойчива.
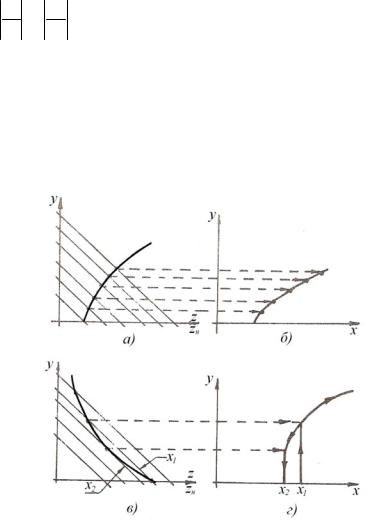
От вида нагрузочной характеристики зависит режим работы преобразователя. На рис. 1.12, а все точки пересечения нагрузочной и внешних характеристик устойчивы, и перестроенная регулировочная характеристика соответствует работе преобразователя в непрерывном режиме (рис. 1.12, б). На рис. 1.12, в при некоторых значениях входной величины х существуют устойчивые точки пересечения нагрузочной характеристики с внешней.
Рис. 1.12
23
Действительно, при x < x2, у = 0 (нет точек пересечения внешних и нагрузочной характеристик). При x = x1 две точки пересечения − устойчивая и неустойчивая, на выходе скачкообразно возникает значение, соответствующее устойчивой. При дальнейшем увеличении x точки пересечения устойчивы и получаем характеристику, аналогично предыдущему случаю. При уменьшении входного сигнала неустойчивая точка возникнет при x = x2, когда и произойдет срыв, выходная величина скачкообразно уменьшится до 0.
Регулировочная характеристика будет иметь вид, показанный на рис. 1.12, г.
1.4. Преобразователи дискретного действия
Сигналы как носители информации могут быть классифицированы до ряду признаков. Одним из важнейших является непрерывность или дискретность.
Непрерывным называется сигнал, который существует всегда в любой момент времени, и может принимать любое значение во всем динамическом диапазоне. Нарушение одного или обоих условий означает переход к сигналу дискретному.
Дискретные сигналы могут быть трех типов: с квантованием по амплитуде, по времени, по амплитуде и времени. На рис. 1.13 показаны временные диаграммы для всех трех случаев, пунктиром показан соответствующий непрерывный сигнал.
В соответствии с типами обрабатываемых сигналов преобразователи также можно разделить на три группы: с квантованием по амплитуде, по времени, по амплитуде и времени. При этом не имеет существенного значения, какой сигнал – входной или выходной – дискретен. В дальнейшем изложении ограничимся рассмотрением преобразователей с непрерывным входным и дискретным выходным сигналом.
Преобразователи дискретного действия (ПДД) с
квантованием по амплитуде, как и преобразователи непрерывного
действия |
(ПНД), |
описываются |
функциональными |
|
|
24 |
|
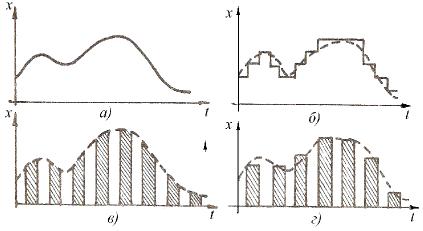
Рис. 1.13
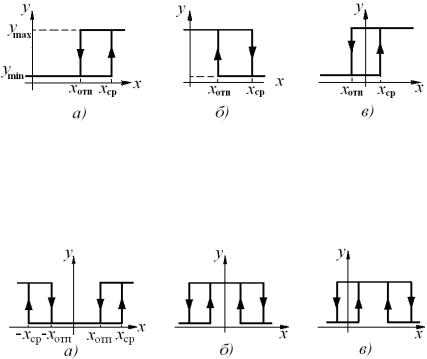
характеристиками и, соответственно, их свойства иллюстрируются регулировочными и внешними характеристиками. Несколько типовых регулировочных характеристик с квантованием по амплитуде показаны на рис. 1.14, а, б, в, г. Все характеристики рассматриваются на примере униполярных преобразователей.
Значения входного сигнала, при котором происходит скачкообразное изменение выходного, когда выходной сигнал переходит на новый, более высокий уровень, называется сигналом срабатывания. В общем случае, при уменьшении входного сигнала скачкообразное уменьшение выходного сигнала произойдет при другом сигнале управления − сигнале отпускания, который отличается от сигнала срабатывания. Отношение xср/ xотп называется коэффициентом возврата. На рис. 1.14, д показана внешняя характеристика, поясняющая работу ПДД под нагрузкой, и построенная на основе регулировочной характеристики рис. 1.14, г. Как видно, характеристика имеет вид, аналогичный внешней характеристике ПНД, но может существовать не при произвольном значении входного сигнала, а только при х = xсрi. Есть еще две существенные особенности, отличающие внешние характеристики ПДД и ПНД. Вопервых, изменениенагрузкинедолжно вызыватьизменения уровней срабатывания и отпускания; во-вторых,
25
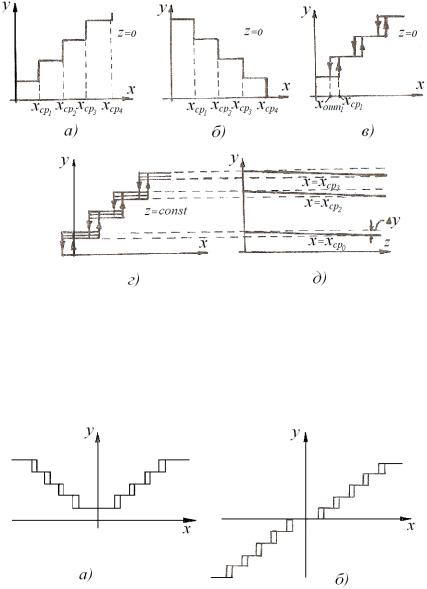
Рис. 1.14
изменение выходной величины при изменении нагрузки должно быть многоменьше шага квантования, т. е ∆y « [yi – y(i-1)].
Hа рис. 1.15 показаны регулировочные характеристики нереверсивныхиреверсивныхПДДсквантованиемпоамплитуде.
Рис. 1.15
26
Среди ПДД с квантованием по амплитуде особый интерес представляют такие, в которых существуют как правило два (иногда три) уровня квантования, т.е. выходная величина может принимать два (три) значения. Такие преобразователи называются релейными или просто реле.
На рис. 1.16, 1.17, 1.18 показаны типовые статические характеристики релейных ПДД, построенных на базе униполярных, нереверсивных и реверсивных преобразователей. Эти преобразователи используются столь широко, что каждая характеристика имеет свое название, часто встречающееся в специальной литературе по разным отраслям знаний. На рис. 1.16 показаны регулировочные характеристики униполярного реле-повторителя (рис. 1.16, а), униполярного реле-инвертора (рис. 1.16, б) и униполярного статического триггера (рис. 1.16,
в).
Рис. 1.16
На рис. 1.17 показаны регулировочные характеристики нейтрального реле-повторителя (рис. 1.17, а), нейтрального релеинвертора (рис. 1.17, б) и статического триггера с однополярным выходом (рис. 1.17, в).
Рис. 1.17
27
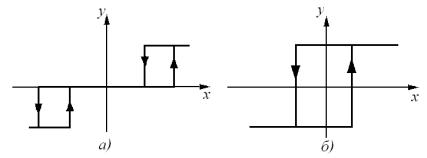
На рис. 1.18 показаны регулировочные характеристики трёхпозиционного реверсивного реле (рис. 1.18, а) и двухпозиционного реверсивного реле (рис. 1.18, б).
Рис. 1.18
ПДД с квантованием по времени. Как следует из определения,
сигнал на выходе таких преобразователей может принимать любое значение в пределах динамического диапазона, но существует только в определенные промежутки времени. По определению статической характеристики, фактор времени должен быть исключен. Сопоставив эти два определения, приходим к выводу, что статические регулировочные и внешние характеристики ПДД с квантованием по времени ничем не отличаются от соответствующих характеристик ПНД.
Интервал времени, в течение которого происходит преобразование входного сигнала, т.е. в течение которого существует выходной сигнал, может иметь постоянную продолжительность и повторяться с постоянной частотой – самый простой вид ПДД с квантованием по времени. ПДД с квантованием по времени более сложного типа, в которых непрерывный входной сигнал преобразуется в длительность импульсов при постоянной частоте их следования или в частоту следования импульсов постоянной длительности, называются широтно-импульсными (ШИМ) и частотно-импульсными модуляторами (ЧИМ).
В ПДД с квантованием по времени в промежутках между интервалами проводимости сигнал на выходе равен нулю.
28
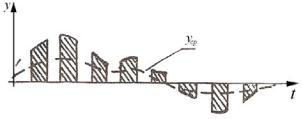
Важно отметить еще одну особенность таких ПНД: если за выходную величину считать не мгновенное, а среднее значение уср (пунктир на рис. 1.19.), то такой преобразователь должен быть отнесён к ПНД, поскольку среднее значение уср может изменяться во всем динамическом диапазоне от 0 до максимального значения и существует всегда.
Рис. 1.19
ПДД с квантованием по времени и амплитуде. Диаграмма,
поясняющая работу таких преобразователей, показана на рис. 1.13, г. Статические характеристики таких преобразователей полностью совпадают с характеристиками ПДД с квантованием по амплитуде. ПДД с квантованием по времени и амплитуде широко используются длясозданиякодовыхсигналов. Дляэтогоиспользуют преобразователи с двумя уровнями квантования по амплитуде, которым условно приписывают значение 0 и 1; наличие сигнала на выходе – 1, отсутствие – 0. Импульсы, образующие код, могут передаваться последовательно во времени по одному каналу связи (последовательный код) или одновременно по нескольким каналам связи, число которых должно соответствовать числу импульсов в максимальном сигнале (параллельный код).
Квазидискретный режим работы ПНД. Иногда возникает необходимость перевести ПНД в дискретный режим работы. Это достигается, в частности, соответствующим выбором сигнала управления, используя сигнал управления, превышающий хмакс. Использование такого режима работы ПНД целесообразно в тех случаях, когда благодаря ему удается существенно снизить потери в преобразователе и увеличить выходную мощность. Особенно ощутим этот выигрыш в активных преобразователях, обладающих
29
памятью. Подав один раз сигнал управления, можно в течение длительного времени передавать в нагрузку сигнал большой мощности. Такие преобразователи получили название ключевых преобразователей или просто ключей.
30