

Михеев Исполнителные устройства автоматических 2008
.pdfмеханический); редуктор – однородный (механический), а насос – неоднородный (гидроили пневмомеханический).
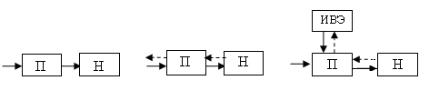
При отсутствии источника вспомогательной энергии вся энергия выходного сигнала обусловлена входным сигналом. Такой преобразователь называется пассивным (рис. 1.2, а). Поскольку всегда существуют энергетические потери внутри самого преобразователя, то мощность выходного сигнала Nвых обязательно меньше входной Nвых< Nвх. Коэффициент полезного действия таких
преобразователей η = |
Nвых |
< 1. |
|
||
|
Nвх |
|
Рис. 1.2
В том случае, когда преобразователь имеет источник вспомогательной энергии (ИВЭ) (рис. 1.2, б) и входной сигнал регулирует подачу энергии от этого источника к нагрузке, то имеется возможность обеспечить Nвых>Nвх, т.е. преобразователь становится усилителем и для оценки его работы вводится
коэффициент усиления по мощности КN = Nвых >1.
Nвх
Преобразователи, имеющие источник вспомогательной энергии,
называют активными.
Из сказанного следует, что трансформатор, например, не является усилителем, даже если выходное напряжение больше входного, так как он относится к пассивным преобразователям, и мощность выходного сигнала всегда меньше входной мощности за счет внутренних потерь.
Классификация по признаку обратимости. Под обратимостью понимают способность преобразователя передавать энергию не
11
только от входа к выходу, но и в обратном направлении, т.е. способность не только отдавать энергию в нагрузку, но и отбирать ее от нагрузки. Для того, чтобы свойство обратимости могло проявиться, нагрузка должна обладать определенными свойствами
– содержать собственный источник энергии. Такая нагрузка называется активной. Примеры активной нагрузки для электрических преобразователей: аккумулятор, противоЭДС двигателя; если напряжение на выходе преобразователя меньше напряжения ЭДС нагрузки, то в случае обратимого преобразователя ток потечет от нагрузки к преобразователю, т.е. в обратном направлении. Для механических преобразователей примером активной нагрузки является опускаемый груз.
В большинстве случаев обратимыми являются пассивные преобразователи при их работе на активную нагрузку. В активных преобразователях при работе на активную нагрузку обратимость может проявиться в передаче энергии от нагрузки не на вход, а на источник вспомогательной энергии. Передача энергии в необратимых и обратимых преобразователях поясняется рис.1.3.
а) |
б) |
в) |
Рис. 1.3
1.3. Статические характеристики преобразователей
Преобразование входного сигнала x(t) в выходную величину у(t) может осуществляться по различным законам. Уравнение, описывающее закон преобразования, определяет его функциональную динамическую характеристику у(t) = f[x(t)]. В общем случае физическая природа x(t) и у(t) может быть различна (неоднородные преобразователи). Кроме того, даже для одного и того же устройства в зависимости от его назначения может быть
12
изменена одна или даже обе эти величины. Например, для двигателя за выходную величину можно принять или скорость вращения вала, или развиваемый момент, а за входную – прикладываемое к его обмотке напряжение или протекающий по ней ток. В реальных преобразователях величина выходного сигнала может зависеть не только от x(t), но и от условий работы (выходная мощность, нагрузка, температура и т.д.), т.е. в самом общем случае рассматриваемая характеристика представляет собой функцию многих переменных: у (t) = f[x(t), N(t), zH(t), θ 0(t)…].
В соответствии с ранее высказанным замечанием, ограничим рассмотрение только наиболее сильно действующим фактором. Таким фактором является выходная мощность, которая зависит от величины нагрузки.
Мощность всегда пропорциональна произведению двух параметров сигнала. Для электрических преобразователей это произведение тока на напряжение N=UI , для механических – произведение силы (момента) на скорость N=Fν , N=Mω (линейную ν или угловую ω соответственно), для гидропневмопреобразователей – произведение давления P на расход Q
N=PQ и т.д.
Если в общем виде у – выходной сигнал, то для того чтобы охарактеризовать его мощность, надо ввести еще один параметр z , удовлетворяющий условию N=yz. Величина z называется нагрузочным параметром. Следует особо подчеркнуть, что нагрузочный параметр не есть собственно нагрузка. Используя понятие нагрузочного параметра, представим функциональную характеристику в виде y(t) = f [x(t), z(t)].
Далее будем считать, что все переменные, входящие в уравнение функциональной характеристики, изменяются столь медленно, что инерционностью преобразователя можно пренебречь. Тогда функцию у = f(x, z) можно считать статической функциональной характеристикой преобразователя. Для удобства анализа и графического представления ее разбивают на два взаимосвязанных семейства статических характеристик: регулировочных и внешних, y = f(x) при z = const и y = f(z) при x = const соответственно.
13
1.3.1. Регулировочная характеристика
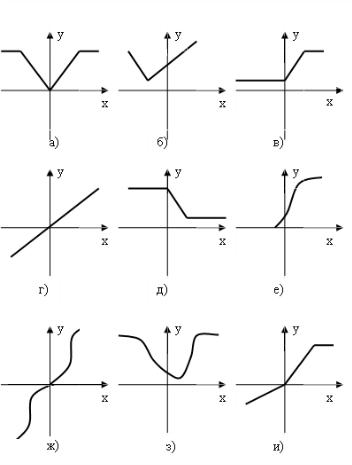
Статическая зависимость выходного сигнала от входного при постоянном значении нагрузочного параметра называется регулировочной характеристикой. Характеристика при z=0, т.е. при нулевой мощности в нагрузке, называется характеристикой холостого хода. На рис. 1.4 представлено несколько типовых регулировочных характеристик.
Рис. 1.4
14
Выделив наиболее существенные признаки характеристик, проведём их классификацию по этим признакам. С точки зрения реакции преобразователя на изменение знака входного сигнала они могут быть униполярными, нереверсивными, реверсивными.
Униполярные (рис. 1.4, в, д, е) реагируют на входной сигнал только одного знака и на выходе способны обеспечить сигнал также только одной полярности. Типичным униполярным преобразователем является диод.
Нереверсивные (рис. 1.4, а, б, з) обеспечивают выходной сигнал одной полярности независимо от знака управляющего сигнала.
В реверсивных преобразователях (рис. 1.4, г, ж, и) изменения знака входного сигнала вызывает изменение знака (полярности, фазы) выходного сигнала. Кроме реакции на изменение знака управляющего сигнала, регулировочные характеристики позволяют провести классификацию преобразователей ещё по ряду признаков.
Симметричность характеристики при изменении знака управляющего сигнала. Этот признак не нуждается в дополнительных пояснениях – характеристики на рис. 1.4, а, г, ж симметричны, остальные нет. Иногда встаёт вопрос о симметрировании характеристик. В некоторых случаях эта задача решается введением постоянного смещения (рис. 1.4, з) в других – применяются более сложные методы, например, введение обратных связей.
Линейность характеристик. Этот признак также не нуждается в особых пояснениях – характеристики рис. 1.4, б, г линейны, описываются уравнением вида y = kx или y = y0 + kx, остальные нелинейны.
Рассмотрим некоторые наиболее типичные виды нелинейности и их причины.
Нелинейность типа насыщение (рис. 1.4, а, в, е, ж, з, и) обусловлена, как правило, конечностью геометрических размеров преобразователя и связанным с этим ограничением на величину передаваемой мощности. Нелинейности, показанные на рис. 1.4, е, ж, з могут быть связаны: с использованием ферромагнитных материалов, у которых кривая намагничивания B = f(H) имеет нелинейность подобного вида; с утечками в гидропневмопреобразователях; в тепловых и электрических приборах и т.д.
15
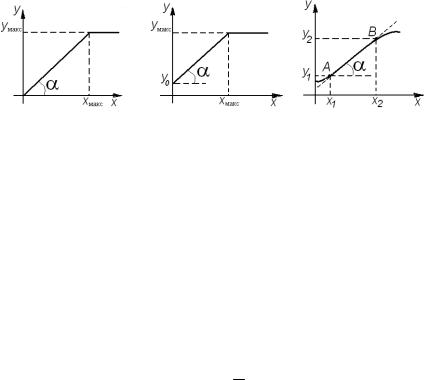
Если специфика использования преобразователя предъявляет повышенные требования к линейности, то регулировочная характеристика позволяет определить пригодность данного преобразователя или выбрать диапазон управляющих сигналов, где эти требования выполняются (участок АВ на рис. 1.5, в). В противном случае следует применять специальные способы улучшения линейности, в частности с помощью введения обратной связи.
а) |
б) |
в) |
Рис. 1.5
На примере характеристики холостого хода униполярного преобразователя (рис. 1.5, б) определим некоторые его параметры.
Коэффициент |
преобразования |
К = |
dy |
. |
В |
теории |
|
||||||
|
|
|
dx |
|
|
|
автоматического регулирования эту величину принято называть коэффициентом передачи; применительно к чувствительным элементам, датчикам в информационной технике – чувствительностью, при изучении электронных схем – коэффициентом усиления. В дальнейшем будем пользоваться термином коэффициент передачи. Для идеальных линейных
преобразователей (рис. 1.5, а) К = xy , из рисунка видно, что
графической интерпретацией коэффициента передачи является tgα . Следует отметить неправомерность отождествления коэффициента передачи с коэффициентом усиления, так как в общем случае может быть и К<1. Для преобразователей с падающей характеристикой (рис. 1.4, д) К<0.
16
Динамический диапазон управляющего сигнала, т.е. диапазон, в котором может изменяться входной сигнал и при этом неизменным сохраняется К (например от 0 до xМАКС на рис. 1.5, а, б) или нелинейность не превышает заданных пределов (например, от x1 до x2 на рис. 1.5, в).
Динамический диапазон выходного сигнала, т.е. пределы
изменения выходной величины: y0 ≤ y |
≤ yМАКС для рис. 1.5, б и |
y1 ≤y ≤y2 для рис. 1.5, в. Отметим, |
что ненулевое значение |
выходного сигнала y0 при x = 0 обычно называют сигналом холостого хода yXX. Часто больший интерес представляет не абсолютные значения y0 и yMAKC, а их отношение, называемое коэффициентом кратности KKP = yMAKC/yXX.
1.3.2. Внешняя характеристика
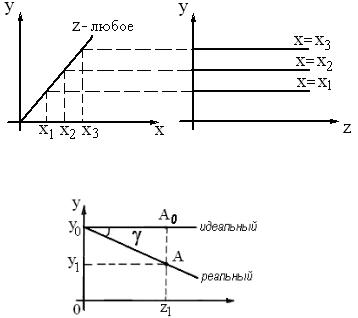
Семейство статических характеристик y = f(z) при x = const, описывающее поведение преобразователя под нагрузкой, обычно называется семейством внешних характеристик, хотя единства в терминологии здесь нет: для двигателей зависимость ω = f(M) чаще называется механической, для электромагнитных механизмов зависимость силы тяги от перемещения – Q = f(δ )– тяговой и т.д. В дальнейшем изложении для общности мы будем пользоваться термином внешняя характеристика. Типовой вид семейства внешних характеристик и методика его получения из семейства регулировочных показаны на рис. 1.6. Рассмотрим основные параметры, определяемые по этой характеристике. Любая точка (т. А на рис. 1.7), лежащая на характеристике, позволяет найти мощность выходного сигнала N = y1z 1= S как площадь прямоугольника Oy1Az1; это вытекает из определения нагрузочного параметра. С учетом этого можно построить зависимость выходной мощности от величины нагрузочного параметра. Поскольку в точках z=0 и z=zMAKC один из сомножителей, определяющих мощность, равен 0, N=0, кривая N=f(z) должна иметь вид, показанный на рис.1.7 пунктиром. По внешней характеристике можно определить кэффициент полезного действия (КПД) преобразователя. Для этого рассмотрим идеальный
17
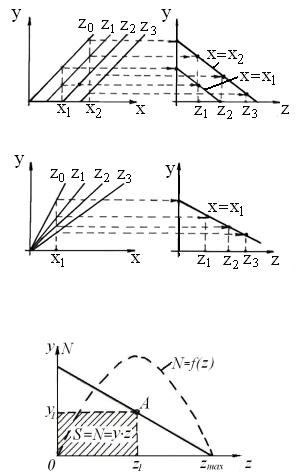
преобразователь, в котором отсутствуют потери и вся входная мощность передаётся на выход.
Рис. 1.6
Рис. 1.7
Семейство регулировочных характеристик такого преобразователя выродится в прямую, совпадающую с характеристикой холостого хода (рис. 1.8, а), а соответствующие ей
18
внешние характеристики при разных значениях входного сигнала будут иметь вид, показанный на рис. 1.8, б.
Сравним теперь внешние характеристики идеального и реального преобразователей (рис. 1.9).
а) б)
Рис. 1.8
Рис. 1.9
Вреальном преобразователе выходная мощность равна
Nвых=y1z 1 , в идеальном Nи=y0z1. Но в идеальном площадь этого же прямоугольника характеризует и входную мощность, так как
Nвых=Nвх. Откуда находим КПД:
η = Nвых /Nвх = y1z1/y0z1 = y1/y0..
Определение выходного сопротивления. В электрических преобразователях мерой внутренних потерь энергии является его выходное сопротивление zвых. Из изложенного выше следует, что графической интерпретацией является тангенс угла наклона внешней характеристики tg γ , а аналитически zвых = ∆y/ ∆z, или для
19

нелинейной внешней характеристики zвых = dydx определяется в
заданной точке.
В совокупности с известным из электротехники параметром – входным сопротивлением – zвх=Uвх/Iвх, выходное сопротивление, определяемое по внешней характеристике, является важным параметром для оценки работы преобразователя и согласования его
снагрузкой.
1.3.3.Характеристики нагрузки и статическая устойчивость
Работа преобразователя сопряжена с отдачей мощности в нагрузку. Поэтому важно знать характер нагрузки и законы её изменения в зависимости от внешних условий и, прежде всего, от величины выходного сигнала преобразователя. Для анализа работы преобразователя необходимо знать нагрузочную характеристику – зависимость zH = f(y). В электрических преобразователях эту зависимость чаще называют вольт-амперной характеристикой нагрузки. Рассмотрим типовые виды нагрузочных характеристик
(рис. 1.10).
Постоянная нагрузка, zH = const (рис. 1.10, а). Это тот частный случай, когда зависимостью нагрузки от выходной величины преобразователя можно пренебречь. К такому виду нагрузки можно отнести, например, момент, создаваемый силой веса груза при его перемещении подъемным краном.
Линейно зависимая нагрузка zH = ку или zH = zh0 + ку (рис. 1.10,
б). Пример такой нагрузки – сила сопротивления пружины при её сжатии или растяжении, или сила вязкого трения линейно зависящая от скорости.
Степенная нагрузка zн = куп или zн = zн0 + куп, n>1 (рис. 1.10,
в). Зависимость сопротивления от приложенного напряжения U: R = =R0(1+αθ), где θ U 2 – температура; момент нагрузки вентилятора или насоса М ω 2 , где ω – угловая скорость вращения.
Нагрузка постоянной мощности zн = ay , где a = const (рис. 1.10, г). Примеры такой нагрузки: вольт-амперная характеристика
20