

Основные уравнения динамики несвободной точки.
Рассмотрим
движение несвободной материальной
точки, массой m,
на которую действуют силы, от связей
не зависящие и которые, как известно,
называются активными. Пусть
![]() – равнодействующая активных сил.
Применим принцип освобождаемости от
связей и приложим к точке реакции связей.
Пусть
– равнодействующая активных сил.
Применим принцип освобождаемости от
связей и приложим к точке реакции связей.
Пусть![]() – равнодействующая реакций связей.
Теперь точка стала свободной, но во всё
время движения должна удовлетворять
уравнениям связей. Следовательно, к
основному уравнению динамики необходимо
добавлять уравнения связей. Тогда в
инерциальной системе отсчёта основное
уравнение динамики имеет вид:
– равнодействующая реакций связей.
Теперь точка стала свободной, но во всё
время движения должна удовлетворять
уравнениям связей. Следовательно, к
основному уравнению динамики необходимо
добавлять уравнения связей. Тогда в
инерциальной системе отсчёта основное
уравнение динамики имеет вид:
![]() (11.4)
(11.4)
Основные задачи динамики несвободной материальной точки.
Как и случае свободной точки имеем две основные задачи.
1.
Прямая задача.
Зная движение
![]() материальной точки массой m
и действующую на неё равнодействующую
активных сил
материальной точки массой m
и действующую на неё равнодействующую
активных сил![]() ,
определить возникающую при этом реакцию
связи
,
определить возникающую при этом реакцию
связи
![]() .
.
Для решения этой задачи используем основное уравнение динамики несвободной точки. Получим
![]()
Прямая задача всегда решается до конца.
2.
Обратная задача.
Зная равнодействующую активных сил![]() действующих на несвободную точку
массой m,
определить её движение
действующих на несвободную точку
массой m,
определить её движение
![]() и
возникающую при этом реакцию связи
и
возникающую при этом реакцию связи![]() .
.
Решения этой задачи связано с интегрированием дифференциальных уравнений движения, удовлетворяющих заданным уравнения связей
 (11.5)
(11.5)
Задача в общем случае практически не разрешима, поскольку количество неизвестных превышает число уравнений.
Решение задачи принципиально возможно, если сделаны некоторые дополнительные предположения о характере наложенных на материальную точку связей.
Рассмотрим следующий случай движения несвободной материальной точки.
Движение материальной точки по неподвижной кривой
Будем считать, что кривая, по которой движется материальная точка, задана. Примером такого движения точки может служить бусинка, движущаяся по проволоке. Для произвольного момента времени изобразим точку М в текущем положении (рис.11.2).
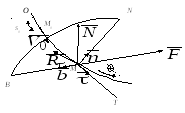
Рис.11.2
Применим
естественный способ задания движения
точки. Построим естественный трёхгранник
МТNB
и направим по направлениям Т,
N,
B
единичные векторы
![]() .
.
Пусть
![]() - активная сила, действующая на точку,
- активная сила, действующая на точку,![]() - реакция связи. ОбозначимR
- проекцию реакции связи на касательную,
а проекции реакции на нормаль и бинормаль
обозначим для удобства
- реакция связи. ОбозначимR
- проекцию реакции связи на касательную,
а проекции реакции на нормаль и бинормаль
обозначим для удобства
![]() и
и![]() соответственно. Тогда
соответственно. Тогда
![]() ,
,
Запишем основное уравнение динамики несвободной точки.
![]() .
.
Спроектируем его на естественные оси:
![]()
 (11.6)
(11.6)
Пусть
точка О
– начало отсчёта дуги s
на траектории точки. Тогда
![]() где
где![]() -
радиус кривизны траектории в точкеМ.
-
радиус кривизны траектории в точкеМ.
Подставляя проекции ускорения в уравнения (11.6), получим:
 (11.7)
(11.7)
Система уравнений (11.7) имеет четыре неизвестных:
![]() .
.
Для
того, чтобы система была замкнутой
необходимо сделать одно дополнительное
предположение. Наложим условия на силу
трения
![]() .
.
Рассмотрим три модели для силы трения.
I. Связь идеальная. .
Система уравнений движения точки в этом случае будет замкнутой:
 (11.8)
(11.8)
Пусть М0 – начальное положение точки. Оно не обязательно совпадает с началом отсчёта О (рис.11.2). Зададим начальные условия:
![]() (11.9)
(11.9)
Уравнения (11.8) решаются в следующем порядке:
1). Интегрируя первое уравнение системы при начальных условиях (11.9) определяется закон движения точки:
![]() . (11.10)
. (11.10)
2).
Подставляя закон движения (11.0) во второе
и третье уравнения системы определяются
![]() и
и![]()
![]() :
:
![]() .
.
3). По теореме Пифагора определяется модуль реакции связи N
![]() .
.
Вектор
реакции связи
![]() лежит в нормальной плоскости естественного
трёхгранника кривой (рис.11.2)
лежит в нормальной плоскости естественного
трёхгранника кривой (рис.11.2)