

2 Години| Лекція №4
Теорія|вживання| перетворення по Лапласу для аналітичного визначення рівнянь систем автоматичного керування.
Застосування|вживання| перетворення по Лапласу для вирішення диференціальних рівнянь руху систем автоматичного регулювання істотно|суттєвий| спрощує це завдання|задачу|, виключаючи необхідність визначення постійних інтеграцій. Це засновано на особливих властивостях Лапласовського зображення проведених|виробляти| функцій за різних початкових умов.
Процес автоматичного регулювання описується системою рівняння окремих ланок і рівняннями зв'язків між ними. Зазвичай|звично| систему розкладають на найбільш прості, елементарні ланки, порядок|лад| диференціальних рівнянь яких не перевищує два.
Хай|нехай| рівняння ланки буде:
Введемо|запроваджуватимемо|
заміну![]() тоді
рівняння запишеться|занотовуватиме|
у вигляді|виді|;
тоді
рівняння запишеться|занотовуватиме|
у вигляді|виді|;
Якщо оригінал Х(t) є функцією змінної t, то зображення X(S) буде пов'язано з оригіналом залежністю;
![]()
![]()
На підставі прямого і зворотного перетворення Лапласа можна побудувати таблиці по перекладу оригіналів в зображення. Приведемо приклад для деяких функцій.
|
|
ОРИГІНАЛ
|
ЗОБРАЖЕННЯ
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|




При розрахунках систем автоматичного регулювання досить часто потрібно знати зображення функції для дії, що управляє або обурюючого|бентежити|.
Приклад|зразок| №1.
Виконати пряме перетворення Лапласа, для диференціального рівняння користуючись таблицею:

Використовуючи дані таблиці отримаємо|одержуватимемо|:
![]()
Приклад|зразок| №2.
Виконати зворотне перетворення по Лапласу для отримання|здобуття| рівняння з|із| оригіналами.
![]()
Приклад|зразок| №3.
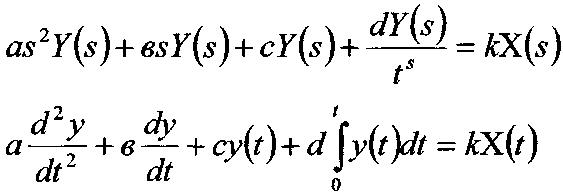
Виконати пряме перетворення Лапласа для диференціального рівняння:

використовуючи таблицю отримаємо|одержуватимемо|:
![]()
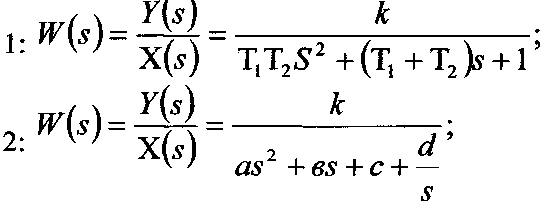
У теорії автоматичного регулювання користуються не рівняннями об'єктів і пристроїв|устроїв| систем, записані через зображення функції, а їх передавальними функціями. Під передавальною функцією розуміють відношення|ставлення| зображення вихідний
величини для об'єкту або пристрою|устрою| системи до зображення функцій вхідної величини, отриманих|одержувати| за нульових початкових умов.
Використовуючи це визначення, знайдемо передавальні функції для прикладів|зразків| №1 і №2:
Визначити передавальну функцію сильфонного| датчика рідинного тиску|тиснення|; Рівняння роботи датчика
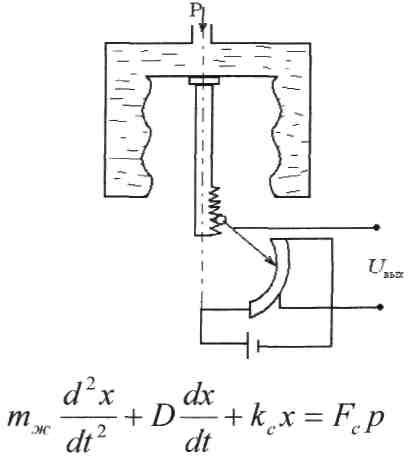
х-| переміщення рейки сильфона|; D-| коефіцієнт в'язкого тертя;
![]() коефіцієнт
пружності сильфона;
Fc-
площа сильфона.
Перетворимо рівняння;
коефіцієнт
пружності сильфона;
Fc-
площа сильфона.
Перетворимо рівняння;


Отримаємо|одержуватимемо| рівняння після|потім| підстановки;

з найдемо
передавальну функцію пристрою|устрою|
відношенням|ставленням|
вихідної величини до вхідної
найдемо
передавальну функцію пристрою|устрою|
відношенням|ставленням|
вихідної величини до вхідної
типовими, або стандартними. Найчастіше використовують ступінчасте, лінійне, синусоїдальне діяння.

![]()
![]()
S ~ коефіцієнт кута нахилу прямої
3). Синусоїдальне діяння характеризує залежність
Найважливішими для автоматичних систем є ступінчасте діяння й одиничний стрибок.
2 години|