

4 Години| Лекція 3
Загальна характеристика типових лінійних ланок.
Типові елементи систем автоматичного керування.
Для вирішення питань дослідження процесів в реальних системах користуються ідеалізованими схемами, які точно описують математично й приблизно характеризують реальні ланки систем у заданому діапазоні частот сигналів.
В теорії автоматичного управління вводиться розуміння типових ланок, передатна функція яких тільки в обмеженому діапазоні відповідає реальним ланкам систем управління.
Розглядаючи характеристики ланок незалежно від їх призначення, фізичного принципу дії, потужності та швидкості, які передають сигнали, можна виділити ряд типових ланок, що описуються звичайними лінійними диференційними рівняннями першого та другого порядку.
A) прості: пропорційні, інтегруючі, диференціюючи ланки;
Б) ланки першого порядку: інерційні, інерційно-диференційні, форсуючі, інерційно-форсуючі;
B) коливальні ланки другого порядку.
Передатна функція всіх типових ланок представляє собою раціональну дріб;
W(P) = К(Р)/D(Р)
Причому нулі і полюси функції W(р), що відповідають рівнянням К(Р) = 0;D(р) = 0,
лежать в лівій напівплощині Р або на її межі, що співпадає з уявною віссю. При відношенні реальної ланки треба обумовити діапазон частот, при якому розглядаються характеристики.
Вихід за межі цього діапазону може привести до необхідності врахування додаткових параметрів і ускладненню математичного опису ланки. Далі будують наведені характеристики типових ланок та приклади цих ланок. Нестійкі і не мінімально-фазові так же як і ланки, що описуються ірраціональними передатними функціями і відносяться до нетипових ланок.
Характеристики елементів автоматики.
Статичні характеристики визначають поведінку елементів автоматики і системи в усталеному режимі.
Рівняння статичної характеристики лінійного елемента має вигляд:
![]() ,де
,де
Xвих - вихідна ланка;
Xвх — вхідна ланка;
![]() -
передаточний коефіцієнт;
-
передаточний коефіцієнт;
![]() -
кут нахилу прямої до осі абсциси;
-
кут нахилу прямої до осі абсциси;
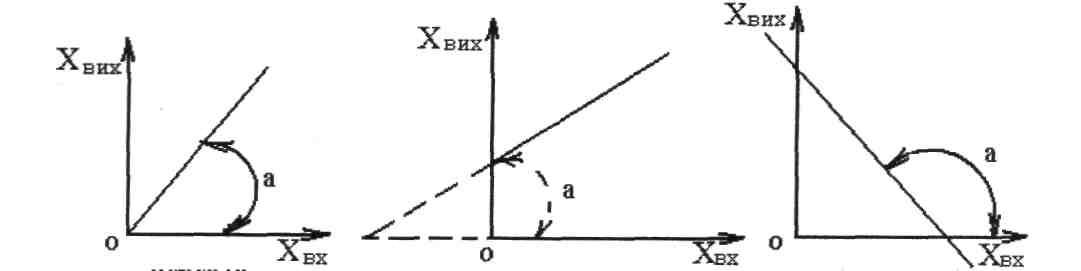
через 0;
зі зворотнім нахилом;
зі зміщенням;
Приклад нелінійних характеристик.
Приклади лінійних характеристик.

плавно змінюється; релейна; з зоною нечутливості;
Тут коефіцієнт k величина змінна. За статичними характеристиками визначають; - абсолютну чутливість елементів,

-
відносну чутливість елементів;


![]()
З формул видно, що абсолютна чутливість має розмір, а відносна - безрозмірна, а тому зручна в практичному користуванні.
Чутливість характеризує перетворюючі властивості сприймаючих елементів автоматики.
Під час роботи елементів крім основного діяння Xвх прикладаються і
зовнішні збурюючи діяння, такі як; спрацювання, старіння матеріалів, прискорення, температура, вібрація, вологість, тиск, коливання напруг тощо.
Через це в елементах виникають похибки, тобто коли фактична характеристика їх відрізняє від розрахункової.
![]()
Для оцінки точності елементів найчастіше застосовують відносну похибку;
Абсолютна похибка:
![]()

-максимальне значення вихідної величини.
Розрізняють систематичні і випадкові похибки.
Систематичні - є результатом діяння певних факторів; коливання напруги
живлення тощо.
Випадкові - наслідок різних несталих причин.
їх визначають за допомогою методів теорії ймовірностей і матстатистики.
Динамічні процеси в лінійних елементах описуються лінійними диференційними рівняннями, у нелінійних - нелінійними. Оскільки простіше дослідити лінійні характеристики (системи), нелінійні приводять до лінійних шляхом лінеаризації.

у
рівнянні
![]()

Перехідну функцію елемента дістанемо прирівнявши
![]()
Добута
крива називається перехідною
характеристикою.

На
початку перехідного процесу (t=0)
значення
перехідної функції дорівнює нулеві.
З часом вихідна величина при подачі на
вхід одиничного ступінчатого сигналу
(діяння) плавно зростає до значення R
при![]() Проекція
дотичної до
Проекція
дотичної до
графіка перехідної функції на вісь абсцис дає сталу часу елемента Т, що є інтервалом протягом якого перехідний процес закінчився б, коли він ішов з максимальною швидкістю.
Насправді перехід, процес триває 3...4Т.
У ділянці зображень за Лапласом динамічні властивості елементів характеризує передаточна функція. Вона є відношенням зображення за Лапласом вхідної величини за нульових початкових умов:

Характеристичне рівняння дістанемо прирівнявши знаменник передаточної функції до нуля:
![]()